 CW32模块使用 MS5611气压传感器
CW32模块使用 MS5611气压传感器
一、模块来源
模块实物展示:
资料下载链接:
https://pan.baidu.com/s/1QOrpiggCE6mBpqabJXUufg
提取码:c2pp
工作电压:1.8~3.6V
工作电流:0.25~23uA
温度精度:0.8℃
温度范围:-40~85℃
气压范围:10~1200 mbar
气压精度:1.5 mbar
输出方式: IIC
管脚数量:3 Pin
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至CW32F030C8T6开发板上【能够测量环境气压】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
当PS引脚接高电平时,传感器属于IIC模式;当PS引脚接低电平时,传感器属于SPI模式;在原理图上,PS引脚通过上拉电阻接了高电平,故默认为IIC模式。
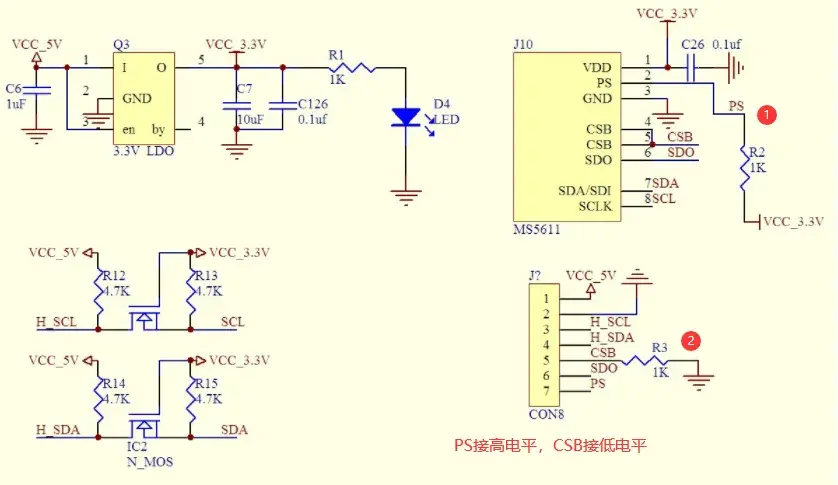
器件地址 = 0XEE
CSB的反补码 即CSB引脚接高电平时, 地址为 1110 110+(读写位)
CSB的反补码 即CSB引脚接低电平时, 地址为 1110 111+(读写位)

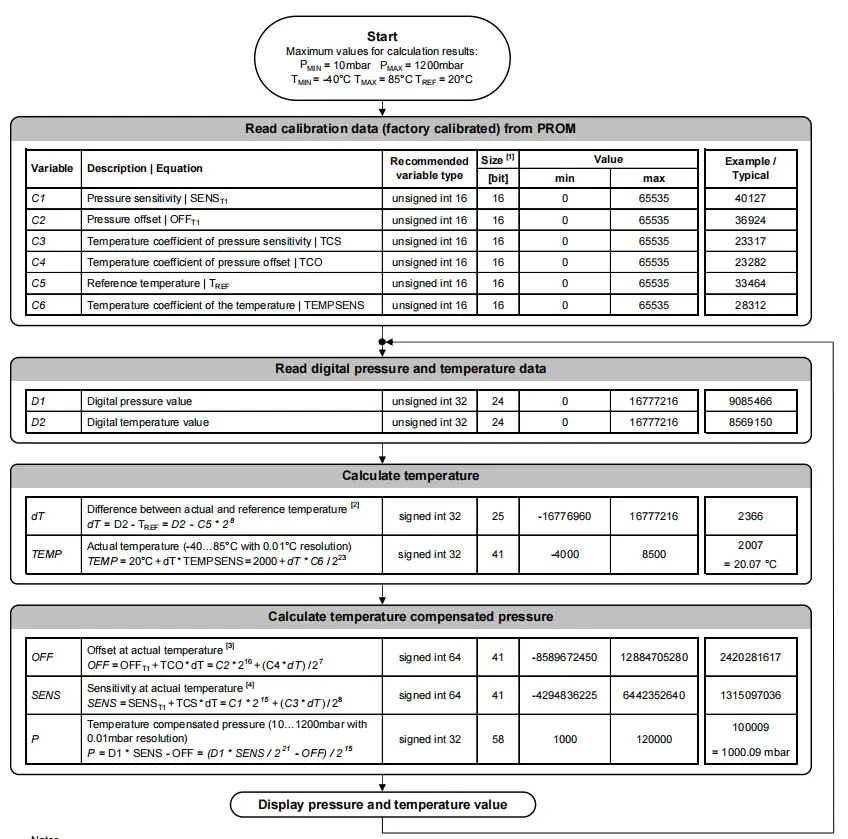
读取气压与温度的流程:开始-> 读取出厂校准值C1至C6 -> 读取气压D1和温度D2的原始数据 -> 将D2和C1C6带入公式求出dT和TEMP,其中TEMP为温度数据-> 将dT和C1至C6带入公式求出OFF、SENS和P,其中P为气压数据。
3.2引脚选择
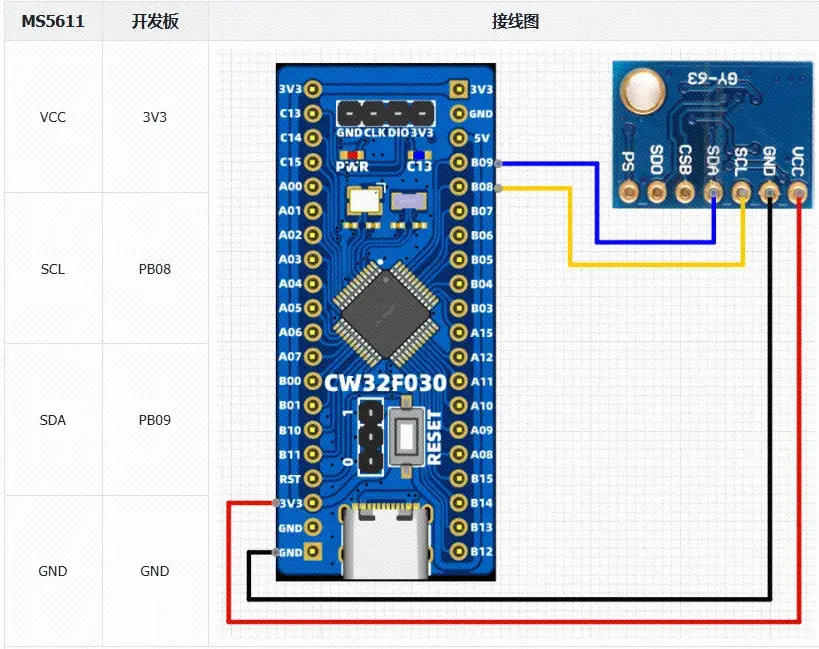
模块接线图
3.3移植至工程
移植步骤中的导入.c和.h文件与【CW32模块使用】DHT11温湿度传感器相同,只是将.c和.h文件更改为bsp_ms5611.c与bsp_ms5611.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_ms5611.c中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "bsp_ms5611.h" #include "stdio.h" #include "board.h" //出厂校准值 //Cal_C1_6[0] = 厂家信息 //Cal_C1_6[1] ~ Cal_C1_6[6] = 校准值 //Cal_C1_6[7] = 校准值的CRC校验 uint16_t Cal_C1_6[8]; /****************************************************************** * 函 数 名 称:MS5611_GPIO_Init * 函 数 说 明:MS5611的引脚初始化 * 函 数 形 参:无 * 函 数 返 回:无 * 作 者:LC * 备 注:无 ******************************************************************/ void MS5611_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化结构体 RCC_MS5611_ENBALE(); // 使能GPIO时钟 GPIO_InitStruct.Pins = GPIO_SDA|GPIO_SCL; // GPIO引脚 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; // 开漏输出 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 输出速度高 GPIO_Init(PORT_MS5611, &GPIO_InitStruct); // 初始化 } /****************************************************************** * 函 数 名 称:IIC_Start * 函 数 说 明:IIC起始时序 * 函 数 形 参:无 * 函 数 返 回:无 * 作 者:LC * 备 注:无 ******************************************************************/ void IIC_Start(void) { SDA_OUT(); SDA(1); delay_us(5); SCL(1); delay_us(5); SDA(0); delay_us(5); SCL(0); delay_us(5); } /****************************************************************** * 函 数 名 称:IIC_Stop * 函 数 说 明:IIC停止信号 * 函 数 形 参:无 * 函 数 返 回:无 * 作 者:LC * 备 注:无 ******************************************************************/ void IIC_Stop(void) { SDA_OUT(); SCL(0); SDA(0); SCL(1); delay_us(5); SDA(1); delay_us(5); } /****************************************************************** * 函 数 名 称:IIC_Send_Ack * 函 数 说 明:主机发送应答或者非应答信号 * 函 数 形 参:0发送应答 1发送非应答 * 函 数 返 回:无 * 作 者:LC * 备 注:无 ******************************************************************/ void IIC_Send_Ack(unsigned char ack) { SDA_OUT(); SCL(0); SDA(0); delay_us(5); if(!ack) SDA(0); else SDA(1); SCL(1); delay_us(5); SCL(0); SDA(1); } /****************************************************************** * 函 数 名 称:I2C_WaitAck * 函 数 说 明:等待从机应答 * 函 数 形 参:无 * 函 数 返 回:0有应答 1超时无应答 * 作 者:LC * 备 注:无 ******************************************************************/ unsigned char I2C_WaitAck(void) { char ack = 0; unsigned char ack_flag = 10; SCL(0); SDA(1); SDA_IN(); delay_us(5); SCL(1); delay_us(5); while( (SDA_GET()==1) && ( ack_flag ) ) { ack_flag--; delay_us(5); } if( ack_flag <= 0 ) { IIC_Stop(); return 1; } else { SCL(0); SDA_OUT(); } return ack; } /****************************************************************** * 函 数 名 称:Send_Byte * 函 数 说 明:写入一个字节 * 函 数 形 参:dat要写人的数据 * 函 数 返 回:无 * 作 者:LC * 备 注:无 ******************************************************************/ void Send_Byte(uint8_t dat) { int i = 0; SDA_OUT(); SCL(0);//拉低时钟开始数据传输 for( i = 0; i < 8; i++ ) { SDA( (dat & 0x80) >> 7 ); delay_us(1); SCL(1); delay_us(5); SCL(0); delay_us(5); dat< <=1; } } /****************************************************************** * 函 数 名 称:Read_Byte * 函 数 说 明:IIC读时序 * 函 数 形 参:无 * 函 数 返 回:读到的数据 * 作 者:LC * 备 注:无 ******************************************************************/ unsigned char Read_Byte(void) { unsigned char i,receive=0; SDA_IN();//SDA设置为输入 for(i=0;i< 8;i++ ) { SCL(0); delay_us(5); SCL(1); delay_us(5); receive< <=1; if( SDA_GET() ) { receive|=1; } delay_us(5); } SCL(0); return receive; } /********************************************************** * 函 数 名 称:MS5611_Reset * 函 数 功 能:MS5611的复位 * 传 入 参 数:无 * 函 数 返 回:0=复位成功 1=器件地址错误 2=命令无应答 * 作 者:LC * 备 注:无 **********************************************************/ char MS5611_Reset(void) { IIC_Start();//起始信号 Send_Byte(0xee|0); //器件地址+写 if( I2C_WaitAck() == 1 )return 1; Send_Byte(0x1e); //复位命令 if( I2C_WaitAck() == 1 )return 2; IIC_Stop(); return 0; } //C1-C6 16位 6个地址 每一个地址16位 /********************************************************** * 函 数 名 称:MS5611_Read_PROM * 函 数 功 能:读取出厂校准值 * 传 入 参 数:无 * 函 数 返 回:无 * 作 者:LC * 备 注:无 **********************************************************/ void MS5611_Read_PROM(void) { uint8_t data_H=0,data_L=0; uint8_t i = 0; for( i = 0; i < 8; i++ ) { IIC_Start();//起始信号 Send_Byte(0xee|0); //器件地址+写 I2C_WaitAck(); Send_Byte( 0xA0 + i * 2 ); //寄存器地址 I2C_WaitAck(); IIC_Stop(); delay_us(200); IIC_Start();//起始信号 Send_Byte(0xee|1); //器件地址+读 I2C_WaitAck(); data_H = Read_Byte();//读取的数据高8位 IIC_Send_Ack(0); data_L = Read_Byte();//读取的数据低8位 IIC_Send_Ack(1); IIC_Stop(); //保存出厂校准数据 Cal_C1_6[i] = (data_H< <8) | data_L; } } /********************************************************** * 函 数 名 称:MS5611_Read_D1_D2 * 函 数 功 能:读取气压D1和温度D2的初始数据 * 传 入 参 数:regaddr=0x48或0x58 * 函 数 返 回:返回读取后整合为24位的数据 * 作 者:LC * 备 注: * regaddr= 0x48 读取D1数据(OSR=4096) * regaddr= 0x58 读取D2数据(OSR=4096) **********************************************************/ uint32_t MS5611_Read_D1_D2(uint8_t regaddr) { uint32_t dat = 0; uint8_t buff[3] ={0}; IIC_Start();//起始信号 Send_Byte(0xee|0); //器件地址+写 if( I2C_WaitAck() == 1 )printf("D1 NACK -1rn"); Send_Byte(regaddr); //OSR = 4096 if( I2C_WaitAck() == 1 )printf("D1 NACK -2rn"); IIC_Stop(); delay_ms(10); IIC_Start();//起始信号 Send_Byte(0xee|0); //器件地址+写 if( I2C_WaitAck() == 1 )printf("D1 NACK -3rn"); Send_Byte(0X00); if( I2C_WaitAck() == 1 )printf("D1 NACK -4rn"); IIC_Stop(); delay_ms(10); IIC_Start();//起始信号 Send_Byte(0xee|1); //器件地址+读 if( I2C_WaitAck() == 1 )printf("D1 NACK -5rn"); buff[0] = Read_Byte(); IIC_Send_Ack(0); buff[1] = Read_Byte(); IIC_Send_Ack(0); buff[2] = Read_Byte(); IIC_Send_Ack(1); IIC_Stop(); dat = (((buff[0]< <16) | ( buff[1]< <8)) | buff[2]); return dat; } uint32_t D1 = 0, D2 = 0, dT = 0; /********************************************************** * 函 数 名 称:Get_TEMP * 函 数 功 能:换算温度 * 传 入 参 数:无 * 函 数 返 回:没有小数点后的温度数据 * 作 者:LC * 备 注:无 **********************************************************/ float Get_TEMP(void) { float dat = 0; long long TEMP = 0; D1 = MS5611_Read_D1_D2(0x48); delay_ms(10); D2 = MS5611_Read_D1_D2(0x58); delay_ms(10); dT = D2 - (Cal_C1_6[5] * 256.0); TEMP = 2000 + (((float)dT * Cal_C1_6[6]) / 8388608.0); // printf("temp = %lld%lld.%lld%lldrn",TEMP/1000, TEMP/100%10,TEMP/10%10,TEMP%10); //没有小数的温度 dat = (((TEMP/1000)*10) + (TEMP/100%10)) ; return dat; } /********************************************************** * 函 数 名 称:Get_pressure * 函 数 功 能:换算气压数据 * 传 入 参 数:无 * 函 数 返 回:返回气压,单位(HPa) * 作 者:LC * 备 注:无 **********************************************************/ float Get_pressure(void) { long long SENS = 0; long long P =0; long long OFF = 0; Get_TEMP(); OFF = Cal_C1_6[2] * 65536.0 + Cal_C1_6[4] * dT / 128; SENS = (Cal_C1_6[1] * 32768.0) + ((Cal_C1_6[3] * dT ) / 256.0); P = (D1 * SENS / 2097152.0 - OFF) / 32768.0; return (P/100.0); }
在文件bsp_sht10.h中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #ifndef _BSP_MS5611_H_ #define _BSP_MS5611_H_ #include "board.h" //端口移植 #define RCC_MS5611_ENBALE() __RCC_GPIOB_CLK_ENABLE() #define PORT_MS5611 CW_GPIOB #define GPIO_SDA GPIO_PIN_9 #define GPIO_SCL GPIO_PIN_8 //设置SDA输出模式 #define SDA_OUT() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_MS5611, &GPIO_InitStruct); } //设置SDA输入模式 #define SDA_IN() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_MS5611, &GPIO_InitStruct); } //获取SDA引脚的电平变化 #define SDA_GET() GPIO_ReadPin(PORT_MS5611, GPIO_SDA) //SDA与SCL输出 #define SDA(x) GPIO_WritePin(PORT_MS5611, GPIO_SDA, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) #define SCL(x) GPIO_WritePin(PORT_MS5611, GPIO_SCL, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) void MS5611_GPIO_Init(void); char MS5611_Reset(void); void MS5611_Read_PROM(void); float Get_TEMP(void); float Get_pressure(void); #endif
四、移植验证
在自己工程中的main主函数中,编写如下。
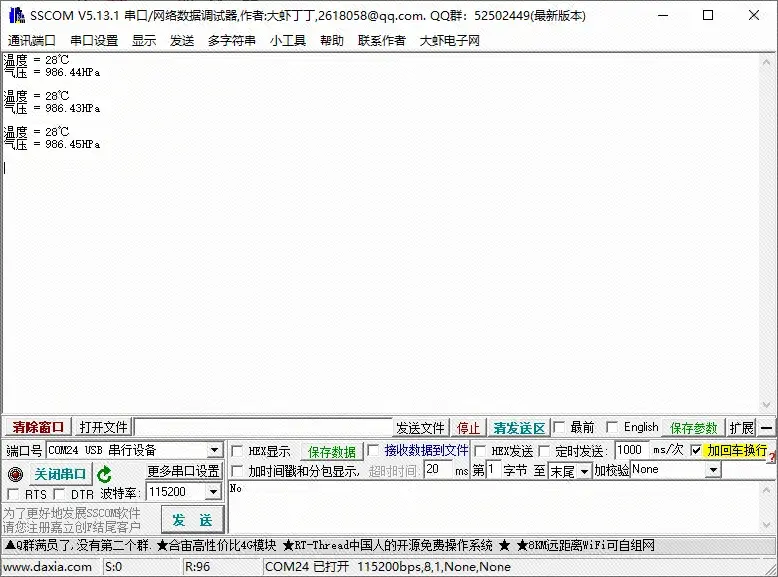
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_ms5611.h" int32_t main(void) { board_init(); // 开发板初始化 uart1_init(115200); // 串口1波特率115200 MS5611_GPIO_Init(); MS5611_Reset();//器件复位 delay_ms(300);//等待初始化完成; MS5611_Read_PROM();//读取出厂校准值 printf("startrn"); while(1) { //输出温度 printf("温度 = %.0f℃rn",Get_TEMP() ); //输出气压 printf("气压 = %.2fHParn",Get_pressure() ); printf("n"); delay_ms(1000); } }
移植现象:每隔一秒左右测量一次温度和气压。
模块移植成功案例代码:
链接:https://pan.baidu.com/s/1unyWALyDcHWy02K_Y77blQ?pwd=LCKF
提取码:LCKF
审核编辑 黄宇
-
传感器
+关注
关注
2550文章
51046浏览量
753160 -
气压传感器
+关注
关注
4文章
136浏览量
21076 -
CW32
+关注
关注
1文章
203浏览量
629
发布评论请先 登录
相关推荐
气压传感器的分类与应用
CW32模块使用 人体红外传感器

CW32模块使用 BMP180气压传感器
小型气压传感器的应用 工业气压传感器的选购技巧
气压传感器选型指南 精密气压传感器的优势
气压传感器应用领域分析 如何选择气压传感器
【CW32模块使用】雨滴传感器
【CW32模块使用】红外测距传感器

CW32模块使用 红外循迹传感器
【项目展示】基于CW32的遥控循迹小车



基于CW32的门禁综合系统






 工商网监
工商网监
评论