 明治案例 |【长距离测距】【微米级精度】选这款激光位移
明治案例 |【长距离测距】【微米级精度】选这款激光位移
随着工业自动化威廉希尔官方网站 的不断进步,制造业对于高精度远程测量的需求日益增强。特别是在锂电生产、精密加工、汽车制造等行业中,机械手的精准抓取与定位成为了影响生产效率与产品质量的关键因素。

因此,市场迫切需要一种能够实时监测并精确控制机械手与电池表面距离的传感器解决方案。
为满足这一市场需求,工业传感器威廉希尔官方网站 不断创新,其中,具备大量程与微米级精度的激光位移传感器成为了众多工业应用场景的首选。
应用场景
在锂电自动化产线上,机械手吸盘需要精准吸取电池移动至下一工序。为了确保机械手能够正常吸起电池,需要安装传感器以获取机械手Z轴高度数据,检测机械手距离电池表面的高度。
1、机械手吸盘与电池组之间不能有太大缝隙,也不能过于贴合
2、传感器需要安装在机械手臂上跟随机械手来回运动
3、传感器距离电池组表面高度在390mm左右
难点分析:
1、精度要求高:机械手吸盘与电池组之间不能有太大缝隙,也不能过于贴合,因此需要高精度的传感器来检测距离。
2、动态测量:传感器需要跟随机械手来回运动,因此需要具备稳定性和可靠性。
1、大量程需求:由于机械手需要在一定范围内移动,传感器需要具备足够的量程来满足需求。
推荐选型-700mm大量程位移
可选用明治激光位移MLD21系列,精度高(线性精度±0.3%F.S,重复精度600um),700mm超大量程,适合【机械手测距定位】的检测场景。
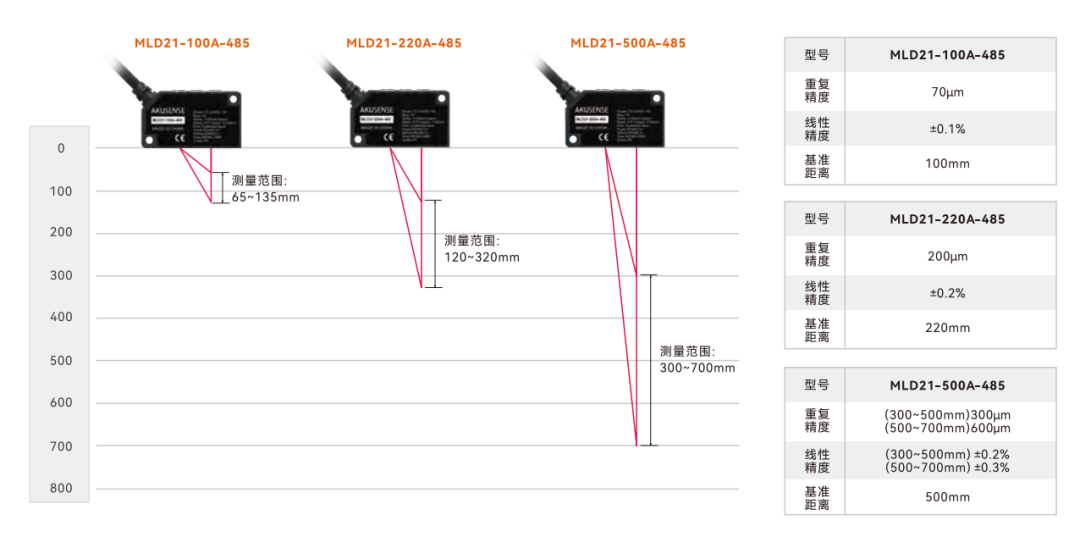
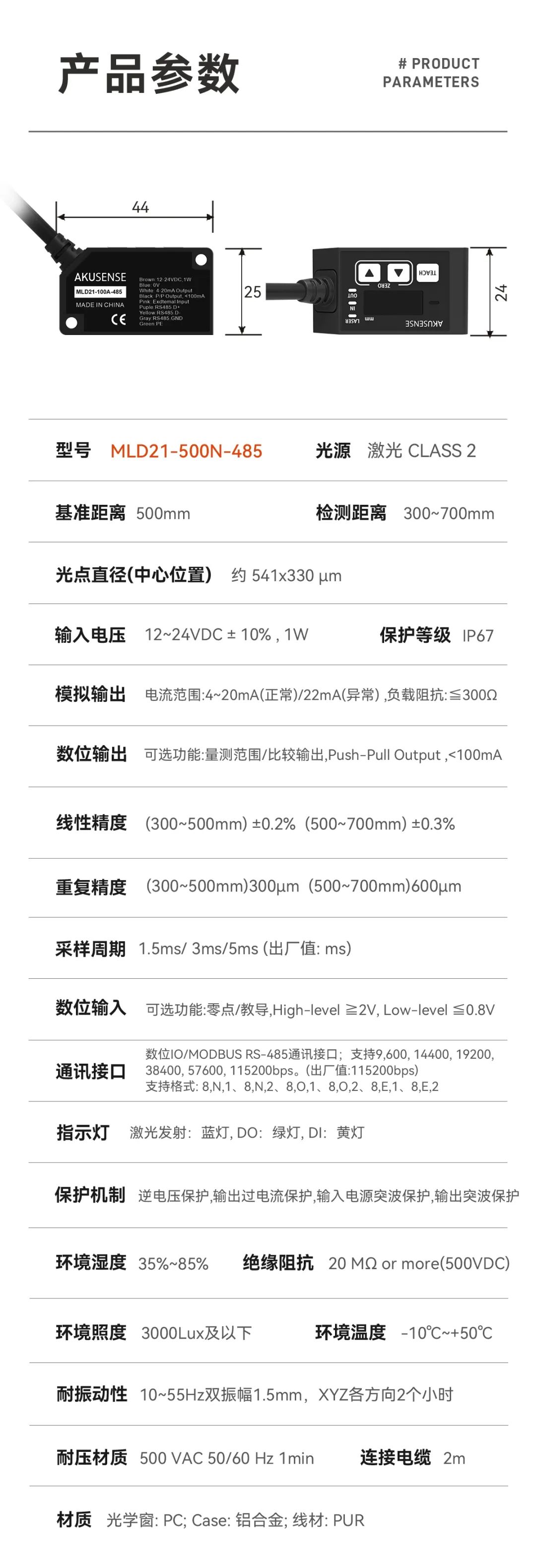
选用MLD21-500N-485型号,该传感器具备以下特点:
高精度:线性精度可达±0.3%,可以确保机械手吸盘与电池组之间的精确距离控制。
大量程:量程范围可达300~700mm,满足机械手在不同位置时的测量需求。
485通讯模式:支持485通讯模式,可以与上位机进行信息交互,实现数据的实时监控和处理。
稳定性佳:采用CMOS感光元件和激光三角测量原理,实现高精度检测,同时传感器具备稳定性和可靠性,可以适应动态测量环境。
实施步骤
1、安装传感器:将MLD21系列激光位移传感器安装在机械手臂上,确保传感器能够跟随机械手来回运动。
2、设置测量参数:根据机械手和电池组的实际尺寸,设置传感器的测量参数,包括测量范围、精度等。
3、实时监控:传感器实时测量机械手距离电池表面的高度,并将数据传输给上位机。上位机根据测量数据调整机械手的运动轨迹和速度,确保机械手能够准确抓取电池。
4、自动化控制:通过485通讯模式,上位机可以读取传感器的测量数据,并进行对比操作,实现自动化控制。同时,传感器还可以提供interwetten与威廉的赔率体系 量信号输出,方便与其他设备进行信号交互。
采用明治MLD21系列激光位移传感器后,锂电自动化产线的机械手抓取定位精度得到了显著提高。传感器能够实时、准确地测量机械手距离电池表面的高度,并根据测量数据调整机械手的运动轨迹和速度。
-
传感器
+关注
关注
2550文章
51056浏览量
753264 -
激光
+关注
关注
19文章
3194浏览量
64457 -
工业自动化
+关注
关注
17文章
2371浏览量
67226
发布评论请先 登录
相关推荐
行业知识 | CMOS激光位移传感器如何实现高精度测量?

答疑解惑 | 激光位移传感器-正反射使用Q&amp;A
答疑解惑 | 激光位移传感器-漫反射使用Q&amp;A,必须收藏!

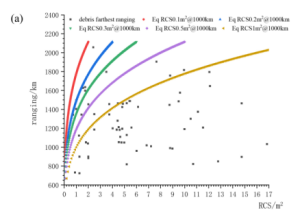
利用瓦级皮秒激光器实现高精度空间碎片观测
明治案例 | 【±0.1%F·S精度】【点激光位移】3C零件厚度测量

明治案例 |【透明物】【高精度测厚】选这款激光位移传感器

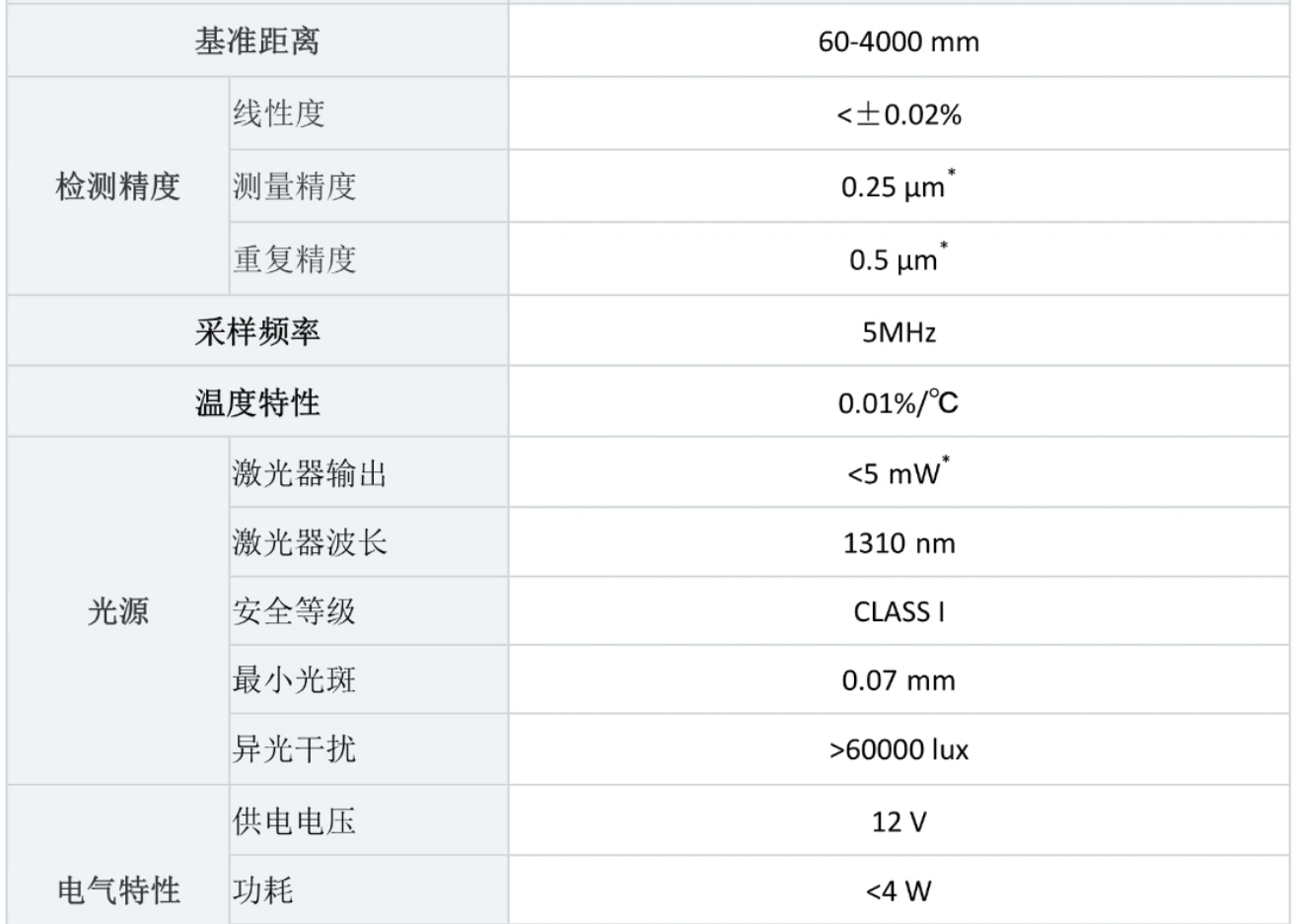
为什么这种激光测距/位移传感器能在1米甚至更大的量程实现10um微米甚至更低的精度?
明治【激光位移传感器】MLD25高效使用指南
操作技巧 | 明治激光雷达AS-33C的安装及使用注意事项

激光测距传感器的安装方式有哪些
让激光位移传感器更精准,安装的时候需要注意这些细节





 工商网监
工商网监
评论