 步进电机3种工作状态分析
步进电机3种工作状态分析
步进拖动的特性由驱动线路、机械结构和步进电动机各自的特性所决定。
步进电机的工作状态可以分为静态、稳态和过渡态三种。
一、静态:
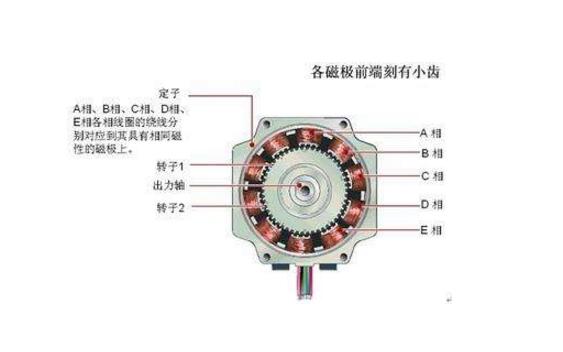
静态即指转子瞬时锁定状态,就是在电机控制绕组里通以直流电流(脉冲频率f=0),且转子处于锁定不懂的状态。在这种状态时,电机绕组相电流最大,且绕组不进行换装,因此电机在接通相里(非全部的)发出不均匀的热。发热是最严重的状态之一。
二、稳态:
稳定同步状态发生在控制脉冲的频率恒定的情况下。此时转子恒速转动,也可认为是相对于同步速度做周期性的波动。这种状态可分为极限(即连续频率下)和非极限两类。
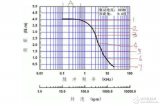
电机输出轴在一定负载下的最大脉冲频率fmax和转子相应的最大转速nmax就是极限同步状态。在这种状态下,转子实际上是均匀无摇摆的旋转。这种状态要在一定的启动程序下才能达到。当脉冲频率高于fmax时,转子就不同步了(即失步)。
在控制频率小于fmax时,电机就处于非极限稳定状态。这种状态常常包含转子的稳定摇摆(振荡),而在共振频率区域这种摇摆特别危险。
三、基本过渡状态:
(1)当频率从零突变到启动fq时,电机转子的速度从零加速到以极限速度启动(通常把运动极限频率称为空载最高情动频率)。高于这个最大突变频率fq(通常称为启动频率或者灵敏度频率)使电机不失步地启动是不可能的。
(2)当突然中断控制脉冲时,电机从稳定同步状态急剧减速到停车锁定,这个稳定同步状态时频率称为稳定极限刹车频率fs。高于这个频率时,进行无滑动刹车是不可能的,只有逐步降频再刹车才能保证不过冲。
(3)电机反转,当突然变更绕组换接的交替顺序时,转子从一个旋转方向的稳定同步转台突变到相反专项的另一个稳定同步状态。这里也存在一个极限反转频率ft。高于此频率,转子就失步,即与所给程序信息有误差。
启动,刹车和反转可以在各种各样(非零的)的初始条件(角度θ和转速η)下实现。
但是,初始条件强烈的影响fq,fs和ft的具体数值,拖动计算因而是困难的。因此,在研究电机频率特性时应该负有初始条件,而且在设计程序中硬开率初始条件。同样,在选用电机时,也应该详细了解这些频率特性的实验条件,以及数据获得的情况(包括初始条件)。
-
步进电机
+关注
关注
150文章
3109浏览量
147451 -
静态
+关注
关注
1文章
29浏览量
14542 -
稳态
+关注
关注
0文章
13浏览量
13844
原文标题:步进电机基本工作状态分类
文章出处:【微信号:gh_bee81f890fc1,微信公众号:面包板社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
步进电机5种驱动方法的利弊分析

步进电机的使用特性与工作特点,步进电机的选用选型及其注意事项
什么是步进电机 步进电机基本结构和工作原理
步进电机铁芯达到饱和状态的原因 如何预防步进电机铁芯达到饱和状态
步进电机的基本工作原理






 工商网监
工商网监
评论