 VCU驱动行驶功能策略
VCU驱动行驶功能策略
1、功能概述
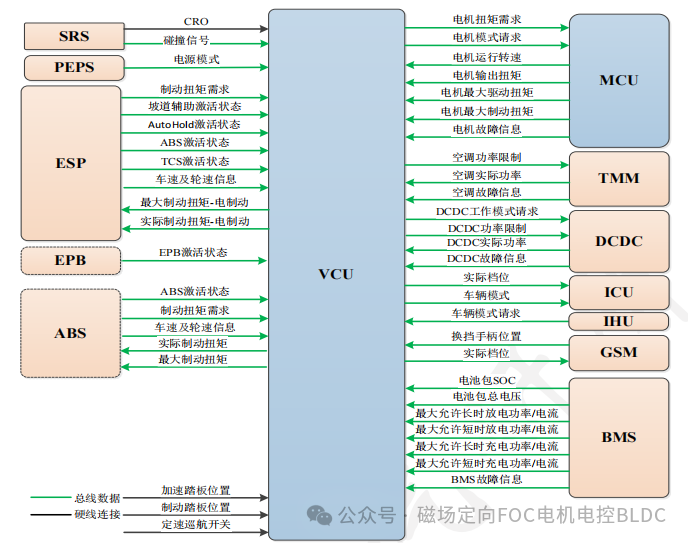
整车Ready状态,VCU根据驾驶员输入信息(加速踏板、制动踏板、档位、驾驶模式),结合车辆状态信息(车速、电池SOC、电池最大放电电流、电池最大充电电流、电机最大输出扭矩),计算车辆驱动扭矩需求,发送扭矩需求和电机模式请求给MCU,MCU控制驱动电机输出车辆驱动行驶所需扭矩
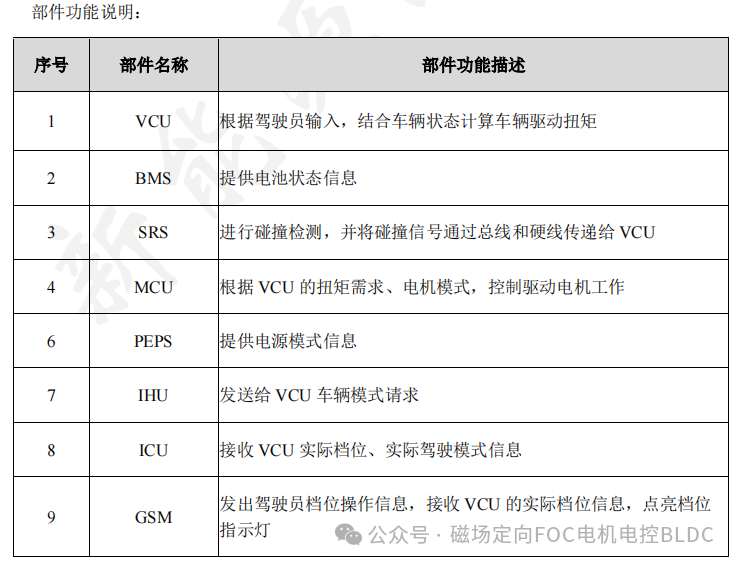
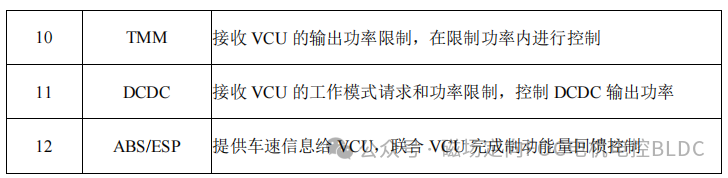
1.1系统组成
2、功能描述
2.1、Ready模式
2.2、Ready模式进入退出
Ready模式进入条件:
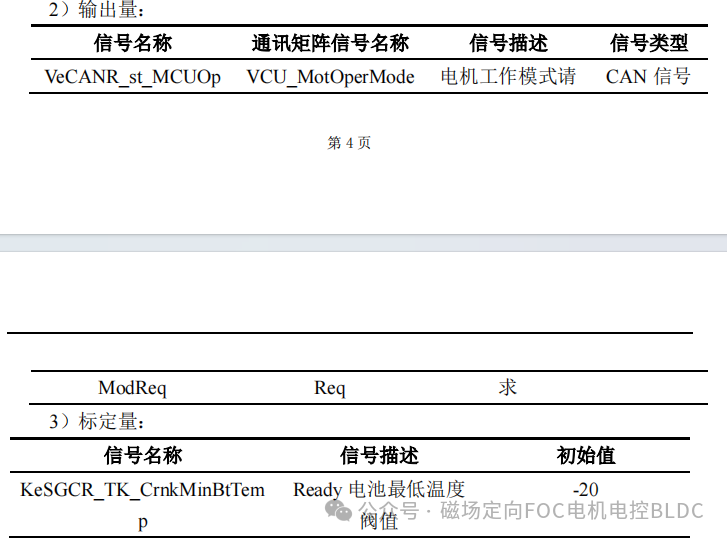
当且只当Peps处于ON档或者Peps直接有Start请求的情况下,高压上电完成后,以下条件都满足,则动力系统进入可行驶模式,VCU向MCU发出VeCANR_st_MCUOpModReq模式请求为扭矩模式或转速模式,MCU响应VCU的扭矩请求或转速请求:
行驶模式高压上电完成;
Peps Start信号VeSGFR_b_KeyStrt为True;
档位器档位位置VeCANR_st_GSMGrDsr为P/N档;
充电枪连接状态VeCANR_b_BatChrgConn为“0”;
电池包温度高于标定阀值KeSGCR_TK_CrnkMinBtTemp;
系统无三级故障。
Ready模式退出条件:
以下条件有任意一个满足,则动力系统退出可行驶模式:
检测到充电枪连接状态VeCANR_b_BatChrgConn不为“0”;
系统有三级故障;
Peps电源信号为Off档;
2.3加速踏板及制动踏板处理
2.4、加速踏板
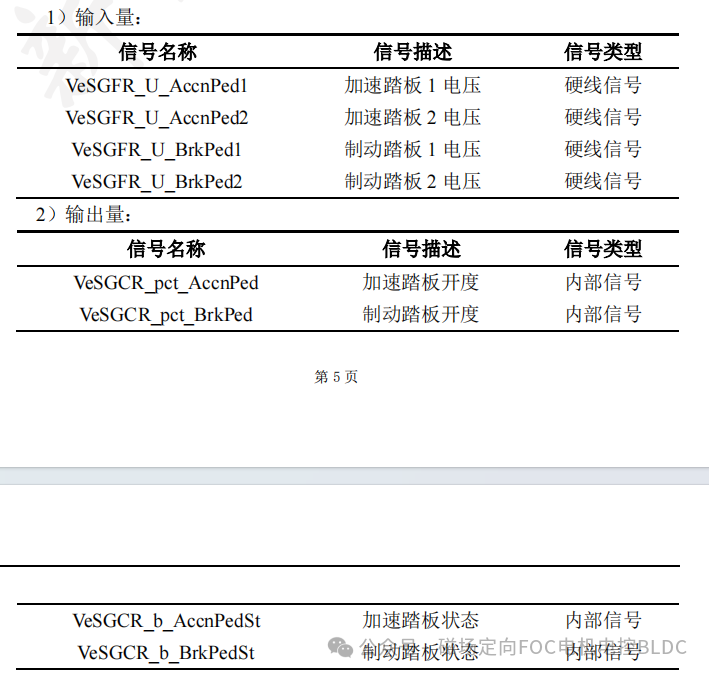
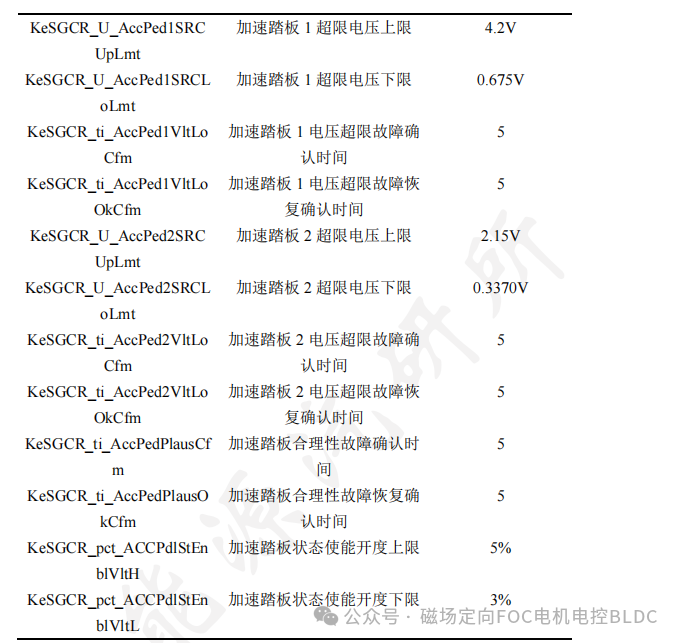
加速踏板应在两个相同方向安装开度传感器,与VCU的采集电路共同组成两个分压电路。加速踏板位置变化时,其采集电压应同时增加或减小。VCU采集 两 个 分 压 电 路 的 电 压 值 ,U1应该是U2的两倍关系。
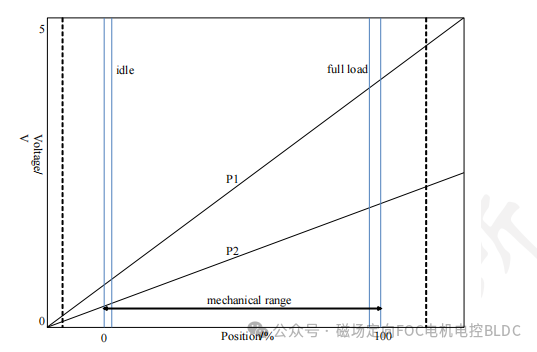
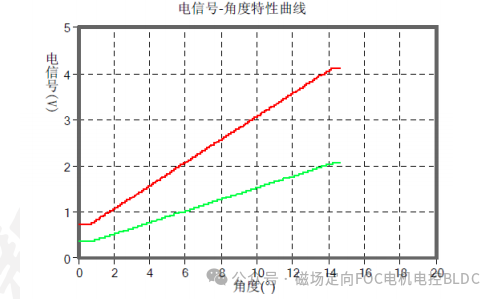
VCU根据加速踏板电压信号和加速踏板传感器电压和开度的关系曲线,如
下图,将采集得到的电压信号转换为加速踏板开度(0~100%)。
VCU辅MCU应同时采集两路油门电压信号,并通过SPI反馈至主MCU,主MCU将采集到的两路油门信号与辅MCU发送的电压信号分别取小后,再进行开度转换。
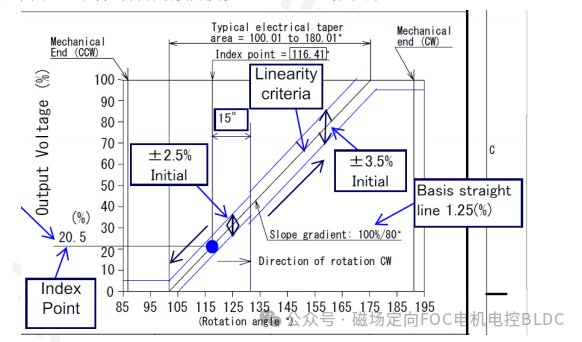
VCU对加速踏板电压信号和开度进行滤波处理,在保证踏板反应灵敏度的
前提下,滤除杂波及噪音干扰。VCU应对加速踏板位置传感器进行诊断,包括电压信号超范围(最大、最小故障),两路电压信号合理性故障(信号偏差超范围)。当其中一路电压信号超限时,或者两路电压信号都超限时,应默认开度为0;当两路合理性故障时,可采用开度较小的一路作为输出。VCU应 对 加 速 踏 板 状 态 进 行 计 算 , 当 加 速 踏 板 开 度 大 于(KeSGCR_pct_ACCPdlStEnblVltH,初始值5%),加速踏板状态踩下;当加速踏板开度小于(KeSGCR_pct_ACCPdlStEnblVltL,初始值3%),加速踏板状态未踩下;KeSGCR_pct_ACCPdlStEnblVltH-KeSGCR_pct_ACCPdlStEnblVltL为迟滞区间。
2.5、制动踏板
制动踏板应在两个相同方向安装开度传感器,与VCU的采集电路共同组成两个分压电路。制动踏板位置变化时,其采集电压应同时增加或减小。
VCU辅MCU应同时采集刹车电压信号,并通过SPI反馈至主MCU,主
MCU将采集到的刹车电压信号与辅MCU发送的电压信号取大值后,进行开度
转换。VCU根据采集的制动踏板电压信号,和制动踏板传感器电压与开度的曲线,如下图,查表得到制动踏板开度值(0-100%,线性关系)。
VCU对制动踏板电压信号和开度进行滤波处理,在保证踏板反应灵敏度的
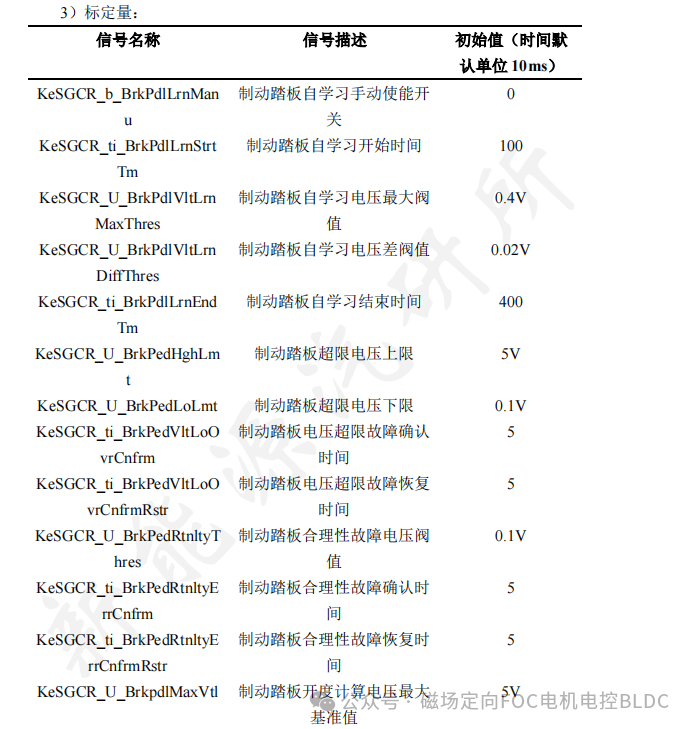
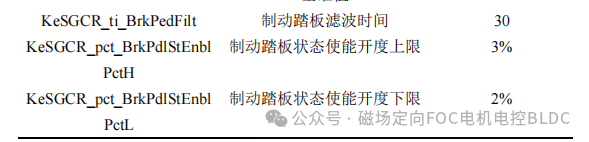
前提下,滤除杂波及噪音干扰。VCU应对制动踏板位置传感器进行诊断,包括电压信号超范围(最大、最小故障),两路电压信号合理性故障(信号偏差超范围)。当其中一路电压信号超限时,应采用制动开度100%;当两路电压信号都超限时,应默认开度为100%;当两路合理性故障时,可采用开度较大的一路作为输出,其中合理性故障判断方式为:两路踏板电压差值的绝对值除以两路踏板电压的和的比例不大于某一百分比(初始值为5%)。VCU应 对 制 动 踏 板 状 态 进 行 计 算 , 当 制 动 踏 板 开 度 大 于
(KeSGCR_pct_BrkPdlStEnblPctH,初始值3%),制动踏板踩下;当制动踏板开度小于(KeSGCR_pct_BrkPdlStEnblPctLL,初始值2%),制动踏板状态未踩下;KeSGCR_pct_BrkPdlStEnblPctH- KeSGCR_pct_BrkPdlStEnblPctL为迟滞区间。
2.6、制动优先
当VCU检测到制动踏板状态信号VeSGCR_b_BrkPedSt和加速踏板状态信号VeSGCR_b_AccnPedSt同时为Ture时,即驾驶员同时踩下制动踏板和加速踏板时,始终优先保证制动功能,以制动优先,VCU应控制整车行驶模式进入制动模式,退出驱动扭矩控制进入制动能量回收扭矩控制。
2.7驱动扭矩控制
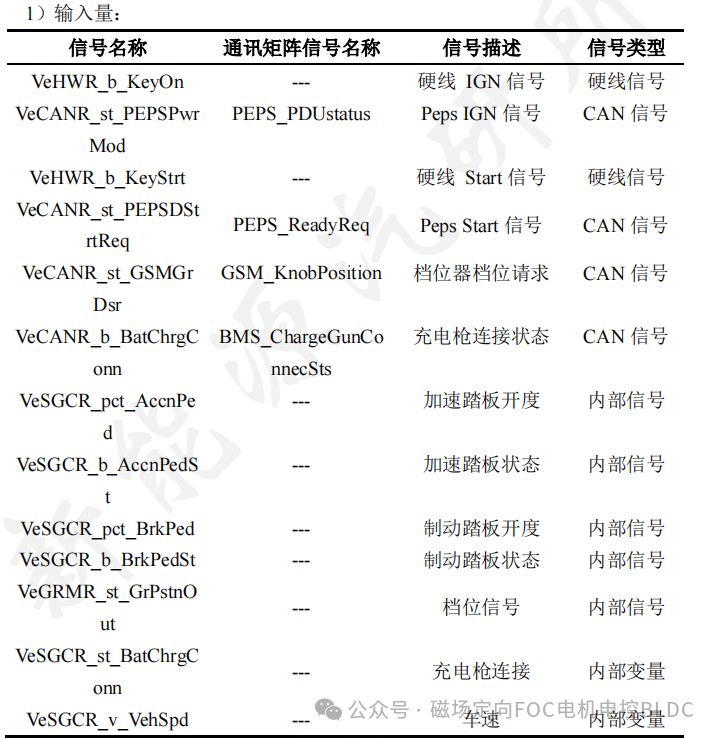
1)输入量:
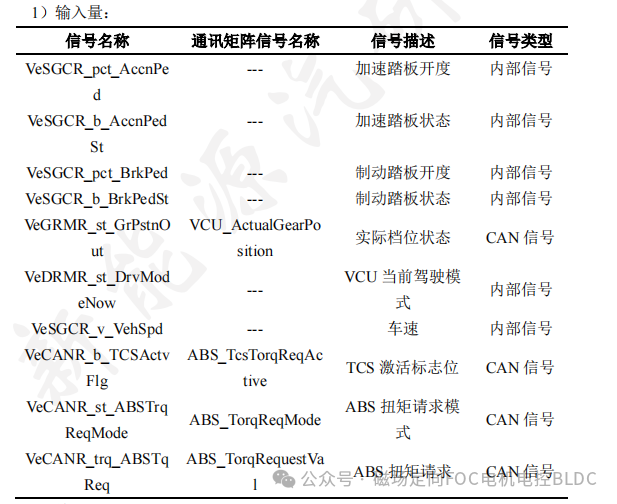


2.71驱动模式进入退出
驱动模式进入条件:
当且只当Peps处于ON档情况下,车辆高压上电完成,同时满足下列条件,车辆进入驱动模式:
车辆处于Ready模式;
档位处于D/R档;
加速踏板踩下;
制动踏板未踩下;
定速巡航未激活;
系统无三级故障;
驱动模式退出条件:
当车辆高压上电完成,如果满足下列任一条件,车辆将退出驱动模式:
车辆退出Ready模式;
档位处于P/N档;
加速踏板松开;
制动踏板踩下;
定速巡航功能激活且巡航需求扭矩大于加速踏板需求扭矩
系统有三级故障;
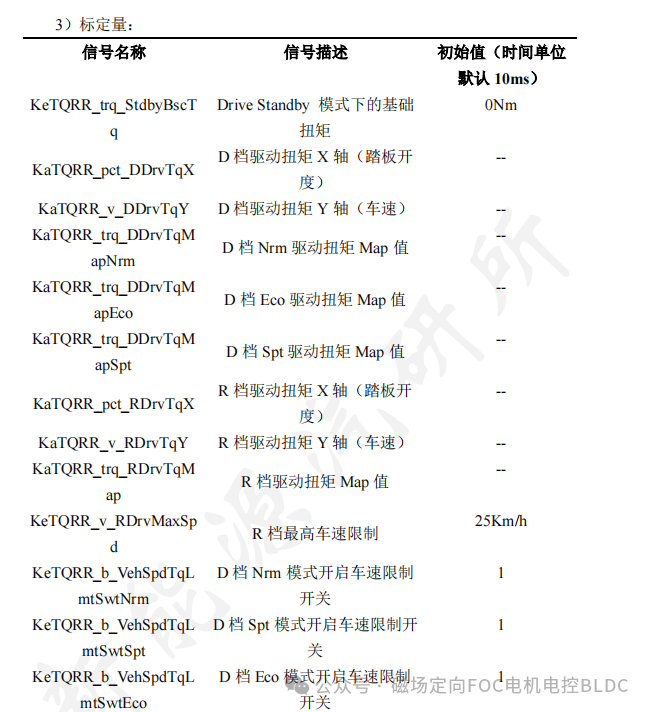
2.72驾驶员需求扭矩
在D档下,在不同车辆模式下,VCU查不同踏板-车速二维表(根据不同车辆模式对动力性的要求)得到驾驶员需求扭矩;在R档下,VCU同样对踏板-车速进行二维查表。
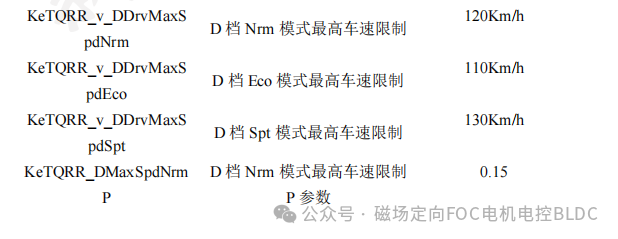
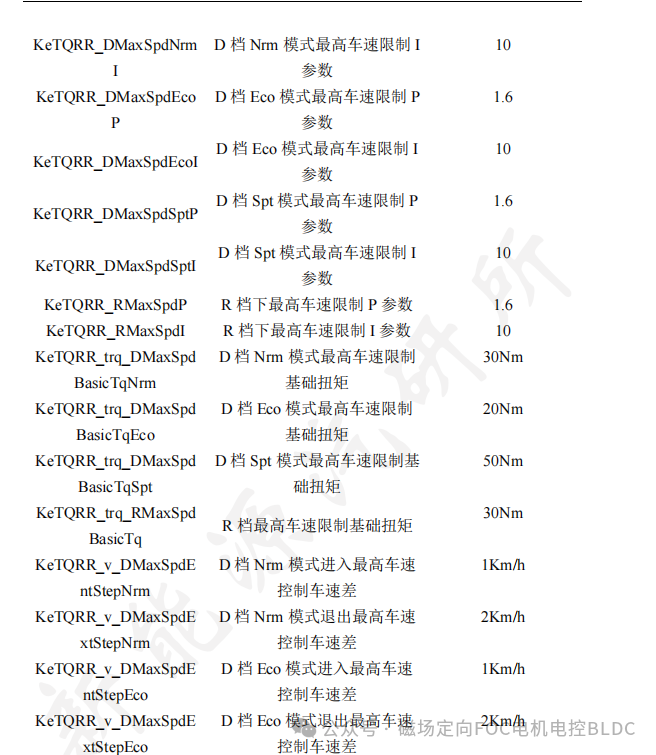
2.73车速及功率限制
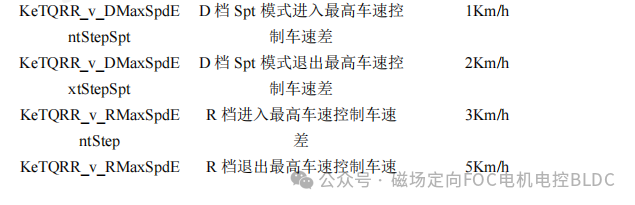
在D档下,VCU对驱动扭矩通过最高车速进行限制,不同车辆模式下设置不同限制值(TBD标定值,ECO初始值为110Km/h,Nrm初始值为120Km/h,Sprt初始值为130Km/h);而R档下,VCU只需要设置一个最高车速限制值(TBD标定值,初始值为25Km/h)。在能量管理模块,VCU依据不同车辆模式对动力性舒适性的需求,计算电机最大可用功率(具体见能量管理功能规范),进而计算出不同的功率扭矩限制。
2.74、底盘扭矩干预
当ABS/ESP增减扭标志位激活时,且ABS/ESP请求扭矩有效时,VCU采
用ABS/ESP发送的请求扭矩。当定速巡航功能激活时,VCU切换到定速巡航模式,采用定速巡航模块计算的需求扭矩(具体见定速巡航功能规范)。
当ACC功能激活时,VCU切换到响应ACC的扭矩请求(具体见自适应巡
航功能规范);当APS激活功能激活时候,VCU根据APS的加速度请求,计算整车行驶需求扭矩,满足APS的期望行驶需求(具体见自动泊车功能规范)。
2.75扭矩滤波
VCU在最终输出电机驱动扭矩需求前,根据车辆驾驶平顺性,对驱动扭矩
进行滤波处理。在不同的驾驶工况下(Tipin/Tipout/过零)设置滤波标志位和滤波值,在实车标定中优化参数保证在满足加速性能的前提下,尽量避免抖动或滑行时扭矩变化过大的现象.
来源:磁场定向FOC电机电控BLDC
-
mcu
+关注
关注
146文章
17143浏览量
351109 -
驱动电机
+关注
关注
9文章
410浏览量
30729 -
电池
+关注
关注
84文章
10567浏览量
129599 -
VCU
+关注
关注
17文章
80浏览量
20553
原文标题:VCU驱动行驶功能策略
文章出处:【微信号:智能汽车电子与软件,微信公众号:智能汽车电子与软件】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
整车控制器VCU基于模型开发
整车控制器VCU EOL 测试系统
串联式混合动力汽车恒温器/功率跟随控制策略相关资料下载
整车VCU威廉希尔官方网站 和开发流程剖析VCU
VCU(整车控制器)简介
自动驾驶线控底盘VCU功能介绍
电机控制器的定义及功能详解
VCU信号的类型和VCU信号的应用

Virtex UltraScale FPGA VCU108评估套件的功能介绍
新能源汽车电控系统VCU策略的开发以及匹配标定
新能源汽车电动化VCU控制器系统功能分类和概览







 工商网监
工商网监
评论