 【CW32模块使用】红外测距传感器
【CW32模块使用】红外测距传感器
GP2Y0A02YKOF是夏普的一款距离测量传感器模块。它由PSD(position sensitive detector)和IRED(infrared emitting diode)以及信号处理电路三部分组成。由于采用了三角测量方法,被测物体的材质、环境温度以及测量时间都不会影响传感器的测量精度。传感器输出电压值对应探测的距离。通过测量电压值就可以得出所探测物体的距离,所以这款传感器可以用于距离测量、避障等场合。
01模块来源
模块实物展示:

资料下载链接:https://pan.baidu.com/s/11dDQHyYJfi0nNyC28vkpoA
资料提取码:qvpm
工作电压:3.3-5V 工作电流:33MA 模块尺寸:37 x 21.6mm 输出方式: interwetten与威廉的赔率体系 量输出 读取方式:ADC 管脚数量:3 Pin 以上信息见厂家资料文件
03移植过程
我们的目标是将例程移植至立创·CW32F030C8T6开发板上【能够判断前方障碍物的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
红外测距传感器的输出是非线性的。每个型号的输出曲线都不同。所以,在实际使用前,最好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。下图是测距距离为20-150CM型号的输出曲线图。
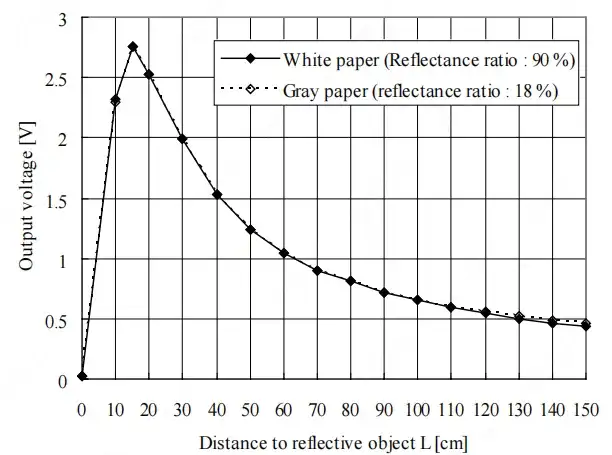
从上图中,可以看到,当被探测物体的距离小于大约 15cm 的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的 靠近障碍物,突然发现障碍物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果是,"砰"的一声。当然了,解决这个方法也不是没有,这里有个小技巧。只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。
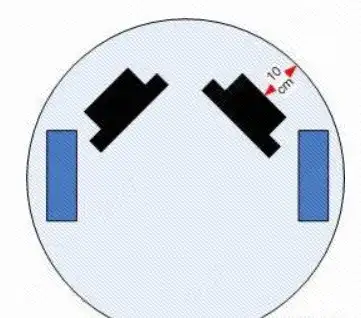
可以避免免探测误差的安装
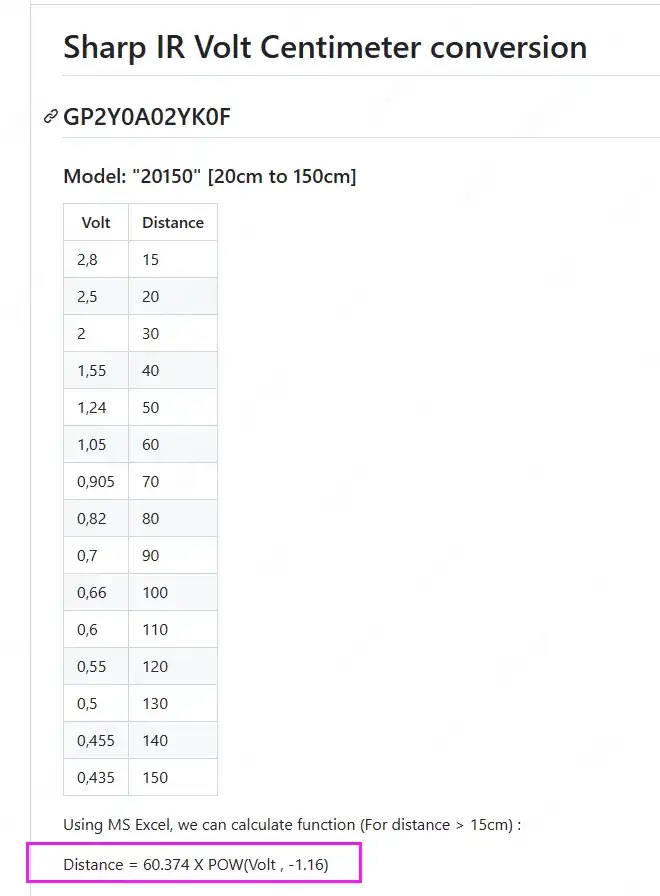
红外测距传感器的输出数据线是通过电压的变化来确定距离,我们可以使用ADC功能获取传感器的电压变化,将其转换为实际距离即可。电压距离转换公式见官方代码库链接:https://github.com/zoubworldArduino/ZSharpIR找到我们20-150CM型号的传感器,在下方有换算公式。
3.2引脚选择
想要使用ADC,需要确定使用的引脚是否有ADC外设功能。可以通过手册进行查看。在用户手册439页。
这里选择使用PA5的附加ADC功能。
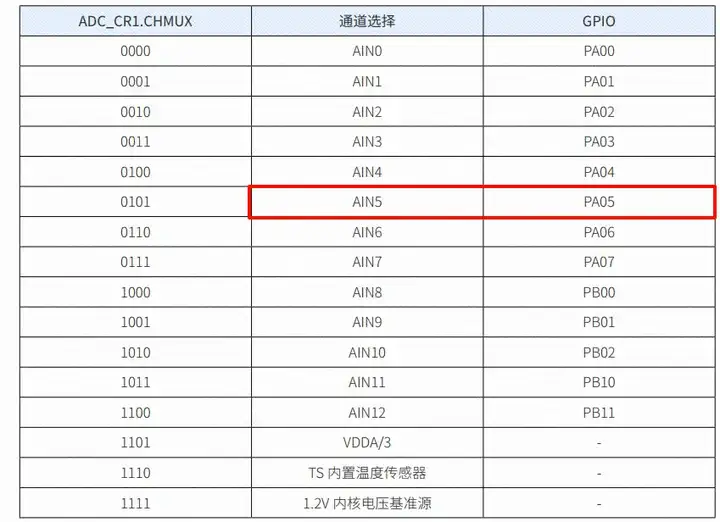
有ADC功能的引脚
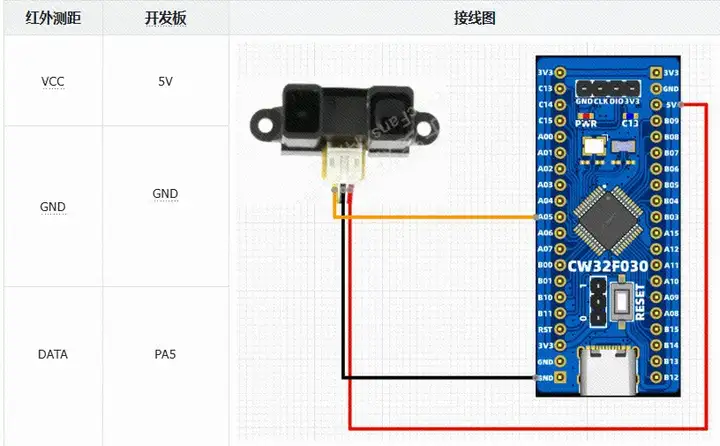
接线表
3.3移植至工程
移植步骤中的导入.c和.h文件与【DHT11温湿度传感器】相同,只是将.c和.h文件更改为bsp_IRdistance.c与bsp_IRdistance.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_IRdistance.c中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-19 LCKFB-LP first version */ #include "bsp_IRdistance.h" #include "stdio.h" #include "math.h" /********************************************************** * 函 数 名 称:IRdistance_GPIO_Init * 函 数 功 能:初始化ADC * 传 入 参 数:无 * 函 数 返 回:无 * 作 者:LC * 备 注:LP **********************************************************/ void IRdistance_GPIO_Init(void) { RCC_IRDISTANCE_GPIO_ENABLE(); // 使能GPIO时钟 RCC_IRDISTANCE_ADC_ENABLE(); // 使能ADC时钟 GPIO_ANALOG_ENABLE(); // PA05设定为模拟输入 /* ADC配置 */ ADC_InitTypeDef ADC_InitStructure; // ADC初始化结构体 ADC_WdtTypeDef ADC_WdtStructure; // ADC看门狗结构体 ADC_SingleChTypeDef ADC_SingleChStructure; // ADC单通道转换结构体 // 配置ADC初始化结构体 ADC_InitStructure.ADC_OpMode = ADC_SingleChOneMode; //单通道单次转换模式 ADC_InitStructure.ADC_ClkDiv = ADC_Clk_Div4; // 时钟频率 = PCLK / 4 = 64MHz / 4 = 16MHz ADC_InitStructure.ADC_SampleTime = ADC_SampTime5Clk; //5个ADC时钟周期 ADC_InitStructure.ADC_VrefSel = ADC_Vref_VDDA; //VDDA参考电压 ADC_InitStructure.ADC_InBufEn = ADC_BufDisable; //关闭跟随器 ADC_InitStructure.ADC_TsEn = ADC_TsDisable; //关闭内置温度传感器 ADC_InitStructure.ADC_DMAEn = ADC_DmaDisable; //不触发DMA ADC_InitStructure.ADC_Align = ADC_AlignRight; //ADC转换结果右对齐 ADC_InitStructure.ADC_AccEn = ADC_AccDisable; //转换结果累加不使能 //ADC模拟看门狗通道初始化 ADC_WdtInit(&ADC_WdtStructure); //配置单通道转换模式 ADC_SingleChStructure.ADC_DiscardEn = ADC_DiscardNull; // 单通道ADC转换结果溢出保存 ADC_SingleChStructure.ADC_Chmux = IRDISTANCE_ADC_CHANNEL; // 选择ADC转换通道 ADC_SingleChStructure.ADC_InitStruct = ADC_InitStructure; // ADC初始化结构体 ADC_SingleChStructure.ADC_WdtStruct = ADC_WdtStructure; // ADC看门狗结构体 ADC_SingleChOneModeCfg(&ADC_SingleChStructure); // 初始化配置 ADC_Enable(); //ADC使能 ADC_SoftwareStartConvCmd(ENABLE); //启动ADC转换 } /********************************************************** * 函 数 名 称:ADC_GET * 函 数 功 能:读取一次ADC值 * 传 入 参 数:无 * 函 数 返 回:测量到的值 * 作 者:LCKFB * 备 注: **********************************************************/ uint32_t ADC_GET(void) { ADC_SoftwareStartConvCmd(ENABLE); //启动ADC转换 uint32_t adcValue = ADC_GetConversionValue(); // 获取数据 return adcValue; } /********************************************************** * 函 数 名 称:Get_Adc_Value * 函 数 功 能:获得某个通道的值 * 传 入 参 数:Count:采集次数 * 函 数 返 回:无 * 作 者:LC * 备 注:LP **********************************************************/ float Get_Adc_Value(uint8_t Count) { uint32_t adcValue = 0; double ret = 0; // 因为采集 SAMPLES 次,故循环 SAMPLES 次 for(int i = 0; i < Count; i++) { adcValue += ADC_GET(); } // 求平均值 ret = (double)adcValue / Count; ret = (((double)ret / 4095) * 3.5); return ret; } /****************************************************************** * 函 数 名 称:Get_illume_Percentage_value * 函 数 说 明:计算红外测距的测量距离 * 函 数 形 参:无 * 函 数 返 回:返回测量距离 * 作 者:LC * 备 注:无 ******************************************************************/ double Get_IRdistance_Distance(void) { double adc_new = 0; double Distance = 0; adc_new = Get_Adc_Value(10); // 根据官方代码库链接:https://github.com/zoubworldArduino/ZSharpIR // 得到距离换算公式: // 【GP2Y0A02YK0F:Using MS Excel, we can calculate function (For distance > 15cm) : // Distance = 60.374 X POW(Volt , -1.16)】 Distance = 60.374 * pow(adc_new,-1.16); return Distance; }
在文件bsp_encoder.h中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-19 LCKFB-LP first version */ #ifndef _BSP_IRDISTANCE_H_ #define _BSP_IRDISTANCE_H_ #include "board.h" #define RCC_IRDISTANCE_GPIO_ENABLE() __RCC_GPIOA_CLK_ENABLE() #define RCC_IRDISTANCE_ADC_ENABLE() __RCC_ADC_CLK_ENABLE() #define GPIO_ANALOG_ENABLE() PA05_ANALOG_ENABLE() // PA05设定为模拟输入 #define IRDISTANCE_ADC_CHANNEL ADC_ExInputCH5 #define PORT_IRDISTANCE CW_GPIOA #define GPIO_IRDISTANCE_AO GPIO_PIN_5 void IRdistance_GPIO_Init(void); float Get_Adc_Value(uint8_t Count) ; double Get_IRdistance_Distance(void); #endif
04移植验证
在自己工程中的main主函数中,编写如下。
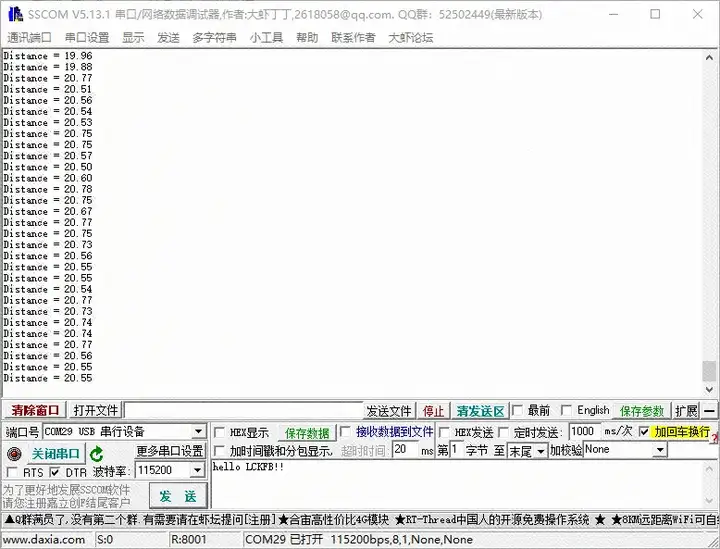
/* * Change Logs: * Date Author Notes * 2024-06-19 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_IRdistance.h" int32_t main(void) { board_init(); // 开发板初始化 uart1_init(115200); // 串口1波特率115200 IRdistance_GPIO_Init(); printf("ADC demo startrn"); while(1) { printf("Distance = %.2frn", Get_IRdistance_Distance() ); delay_ms(1000); } }
上电现象(障碍物距离20CM):
模块移植成功案例代码:
链接:https://pan.baidu.com/s/10x8SiTd8z0HFHmGnWpZ3Vw?pwd=LCKF
提取码:LCKF
-
传感器
+关注
关注
2550文章
51039浏览量
753094 -
模块
+关注
关注
7文章
2695浏览量
47433 -
红外测距
+关注
关注
4文章
20浏览量
14479 -
CW32
+关注
关注
1文章
203浏览量
628
发布评论请先 登录
相关推荐
【CW32模块使用】微波多普勒无线雷达传感器

测距传感器原理
dfrobot红外测距模块介绍

红外测距传感器:改变未来的测量方式


CW32单片机在智能马桶的应用介绍

CW32模块使用 人体红外传感器






 工商网监
工商网监
评论