 ESP32控制舵机的正反转原理是什么
ESP32控制舵机的正反转原理是什么
舵机是一种将电信号转换为机械运动的设备,广泛应用于机器人、无人机、汽车等领域。ESP32是一款功能强大的微控制器,具有丰富的外设接口和高性能的处理能力,可以方便地控制舵机实现正反转等动作。本文将介绍ESP32控制舵机正反转的原理和实现方法。
一、舵机的基本原理
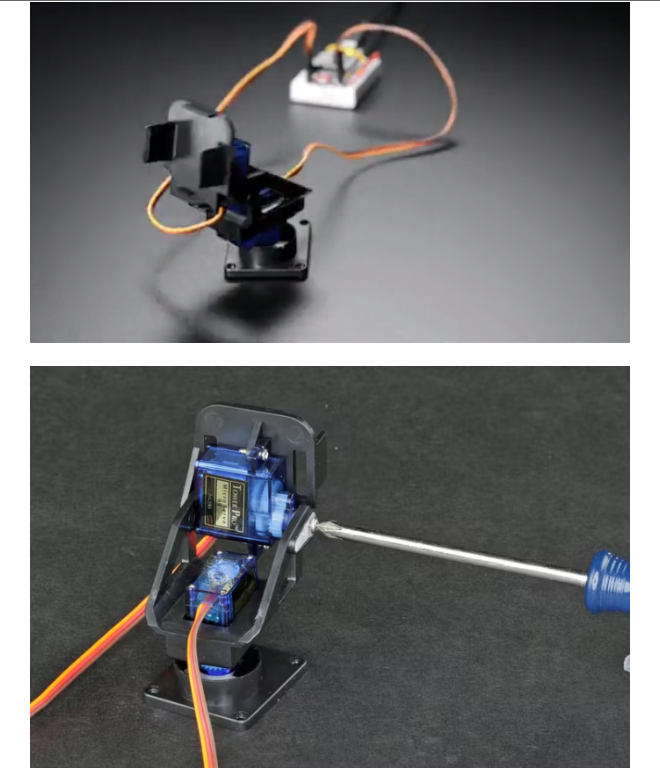
- 舵机的结构
舵机主要由以下几个部分组成:
- 舵机的工作原理
舵机的工作原理是将电信号转换为机械运动。当控制器接收到控制信号时,会根据信号的强度和方向来控制电机的转速和方向,从而实现舵机的正反转。
舵机的控制信号通常是一个周期性的PWM(脉冲宽度调制)信号。PWM信号的占空比决定了舵机的输出力矩,占空比越大,输出力矩越大,舵机转动的角度也越大。当PWM信号的占空比为0时,舵机停止转动;当占空比为50%时,舵机输出最大力矩,转动到最大角度。
二、ESP32控制舵机的原理
- ESP32的外设接口
ESP32具有丰富的外设接口,包括多个PWM通道、I2C、SPI、UART等。这些接口可以方便地与舵机进行通信和控制。
- ESP32控制舵机的方法
ESP32控制舵机的方法主要有以下几种:
- 使用PWM通道:ESP32具有多个PWM通道,可以直接输出PWM信号来控制舵机。
- 使用I2C接口:部分舵机具有I2C接口,可以通过I2C协议与ESP32进行通信。
- 使用SPI接口:部分舵机具有SPI接口,可以通过SPI协议与ESP32进行通信。
- 使用UART接口:部分舵机具有UART接口,可以通过UART协议与ESP32进行通信。
- ESP32控制舵机的实现步骤
(1)初始化舵机
在控制舵机之前,需要先初始化舵机。初始化的过程包括设置舵机的控制接口、初始化舵机的位置传感器等。
(2)配置PWM信号
配置PWM信号是控制舵机的关键步骤。需要设置PWM信号的频率、占空比等参数。频率决定了舵机的响应速度,占空比决定了舵机的输出力矩。
(3)发送控制信号
将配置好的PWM信号发送给舵机,舵机会根据PWM信号的占空比来调整自己的转动角度和速度。
(4)读取位置反馈
部分舵机具有位置反馈功能,可以通过读取位置传感器的值来获取舵机的当前位置。
(5)实现正反转控制
通过调整PWM信号的占空比,可以实现舵机的正反转控制。当占空比为正时,舵机正转;当占空比为负时,舵机反转。
三、ESP32控制舵机的实现方法
- 使用PWM通道控制舵机
(1)初始化PWM通道
在ESP32中,可以使用ledcSetup()函数来初始化PWM通道。该函数需要三个参数:通道号、频率和分辨率。
ledcSetup(channel, freq, resolution);
其中,channel表示PWM通道号,freq表示PWM信号的频率,resolution表示PWM信号的分辨率。
(2)配置PWM定时器
在ESP32中,可以使用ledcAttachPin()函数将PWM通道与某个GPIO引脚关联起来。
ledcAttachPin(gpio_pin, channel);
其中,gpio_pin表示GPIO引脚号,channel表示PWM通道号。
(3)设置PWM信号
在ESP32中,可以使用ledcWrite()函数来设置PWM信号的占空比。
ledcWrite(channel, duty);
其中,channel表示PWM通道号,duty表示PWM信号的占空比。
(4)实现正反转控制
通过调整ledcWrite()函数中的duty参数,可以实现舵机的正反转控制。
- 使用I2C接口控制舵机
(1)初始化I2C总线
在ESP32中,可以使用i2c_init()函数来初始化I2C总线。
i2c_init(I2C_NUM_0, I2C_MODE_MASTER, GPIO_NUM_21, GPIO_NUM_20);
-
微控制器
+关注
关注
48文章
7547浏览量
151331 -
舵机
+关注
关注
17文章
269浏览量
41020 -
机械运动
+关注
关注
1文章
30浏览量
8141 -
ESP32
+关注
关注
18文章
971浏览量
17213
发布评论请先 登录
相关推荐

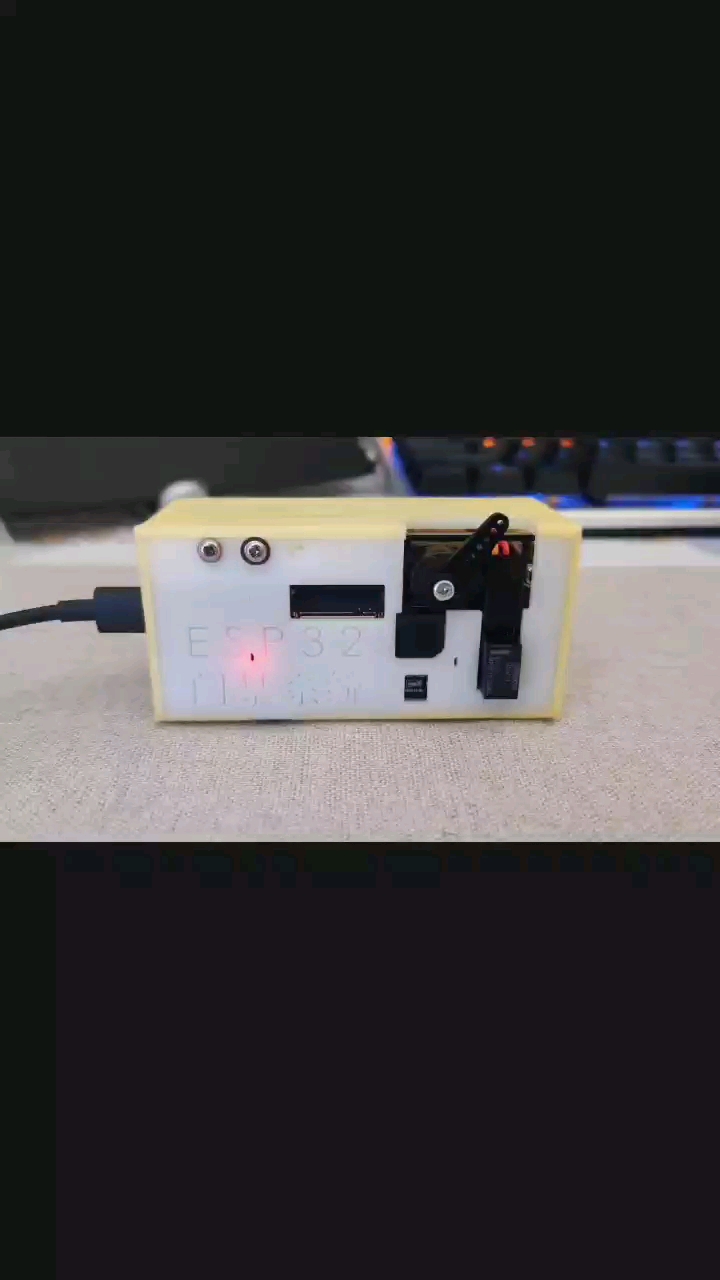
如何使用两个舵机为ESP32-CAM创建云台控制
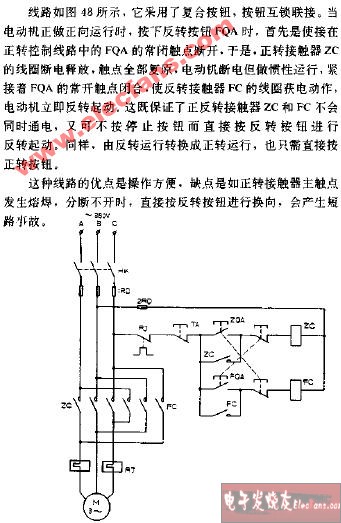
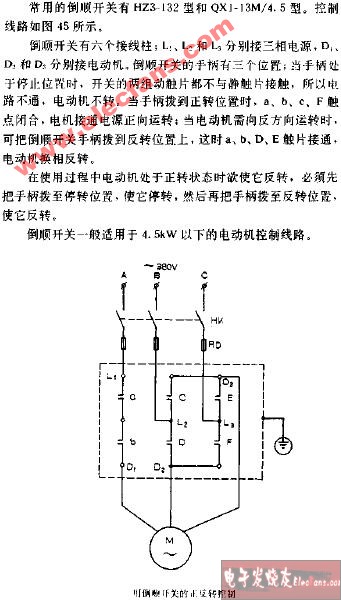
双重互锁正反转控制电路分析






 工商网监
工商网监
评论