 IIR系统和FIR系统的区别
IIR系统和FIR系统的区别
在数字信号处理领域,IIR(无限脉冲响应)系统和FIR(有限脉冲响应)系统是两种常用的滤波器类型。它们在设计、性能和应用方面都存在显著差异。
1. 数学基础
1.1 IIR系统
IIR系统是一种递归滤波器,其输出不仅取决于当前和过去的输入值,还取决于当前和过去的输出值。IIR系统的数学表达式可以表示为:
[ y[n] = -sum_{k=1}^{N} a_k y[n-k] + sum_{k=0}^{M} b_k x[n-k] ]
其中,( y[n] ) 是输出信号,( x[n] ) 是输入信号,( a_k ) 和 ( b_k ) 分别是滤波器系数,( N ) 和 ( M ) 分别是滤波器的阶数。
1.2 FIR系统
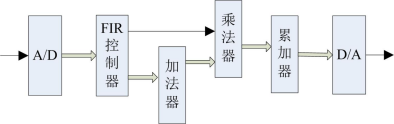
与IIR系统不同,FIR系统是一种非递归滤波器,其输出仅取决于当前和过去的输入值,而与过去的输出值无关。FIR系统的数学表达式可以表示为:
[ y[n] = sum_{k=0}^{M} b_k x[n-k] ]
其中,( y[n] ) 是输出信号,( x[n] ) 是输入信号,( b_k ) 是滤波器系数,( M ) 是滤波器的阶数。
2. 设计方法
2.1 IIR系统设计
IIR系统的设计通常涉及两个主要步骤:确定滤波器的阶数和系数。设计方法包括:
- 脉冲响应法 :通过给定的脉冲响应来确定滤波器的系数。
- 频率响应法 :通过给定的频率响应来确定滤波器的系数。
- 最小二乘法 :通过最小化误差来确定滤波器的系数。
- 优化方法 :通过优化算法(如遗传算法、粒子群优化等)来确定滤波器的系数。
2.2 FIR系统设计
FIR系统的设计通常涉及三个主要步骤:确定滤波器的阶数、窗函数和系数。设计方法包括:
- 窗函数法 :通过给定的窗函数来确定滤波器的系数。
- 频率采样法 :通过给定的频率采样点来确定滤波器的系数。
- 最小二乘法 :通过最小化误差来确定滤波器的系数。
- 优化方法 :通过优化算法(如遗传算法、粒子群优化等)来确定滤波器的系数。
3. 稳定性
3.1 IIR系统稳定性
IIR系统的稳定性取决于其系数。如果所有极点都位于单位圆内,则IIR系统是稳定的。然而,IIR系统的稳定性较难保证,因为其系数可能会受到设计方法和参数选择的影响。
3.2 FIR系统稳定性
与IIR系统不同,FIR系统总是稳定的。这是因为FIR系统的极点都位于原点,这意味着它们不会对系统的稳定性产生影响。
4. 频率响应
4.1 IIR系统频率响应
IIR系统的频率响应可以通过其系数和阶数来确定。IIR系统的频率响应通常具有更复杂的形状,这使得它们在某些应用中具有优势。然而,IIR系统的频率响应也可能导致相位失真和振铃效应。
4.2 FIR系统频率响应
FIR系统的频率响应可以通过其系数和窗函数来确定。FIR系统的频率响应通常具有线性相位特性,这意味着它们在处理信号时不会产生相位失真。然而,FIR系统的频率响应可能在某些应用中不够灵活。
-
滤波器
+关注
关注
161文章
7799浏览量
178014 -
数字信号处理
+关注
关注
15文章
560浏览量
45847 -
FIR
+关注
关注
4文章
146浏览量
33159 -
IIR
+关注
关注
1文章
61浏览量
22837
发布评论请先 登录
相关推荐
FIR滤波器与IIR滤波器的区别与特点
FIR滤波器与IIR滤波器的区别与特点
FIR滤波器和IIR滤波器有什么区别
一文读懂FIR滤波器与IIR滤波器的区别
简谈FIR滤波器和IIR滤波器的区别
详解FIR滤波器和IIR滤波器的区别
详解FIR滤波器和IIR滤波器区别
IIR与FIR滤波器的比较和区别
FIR滤波器与IIR滤波器到底有什么区别

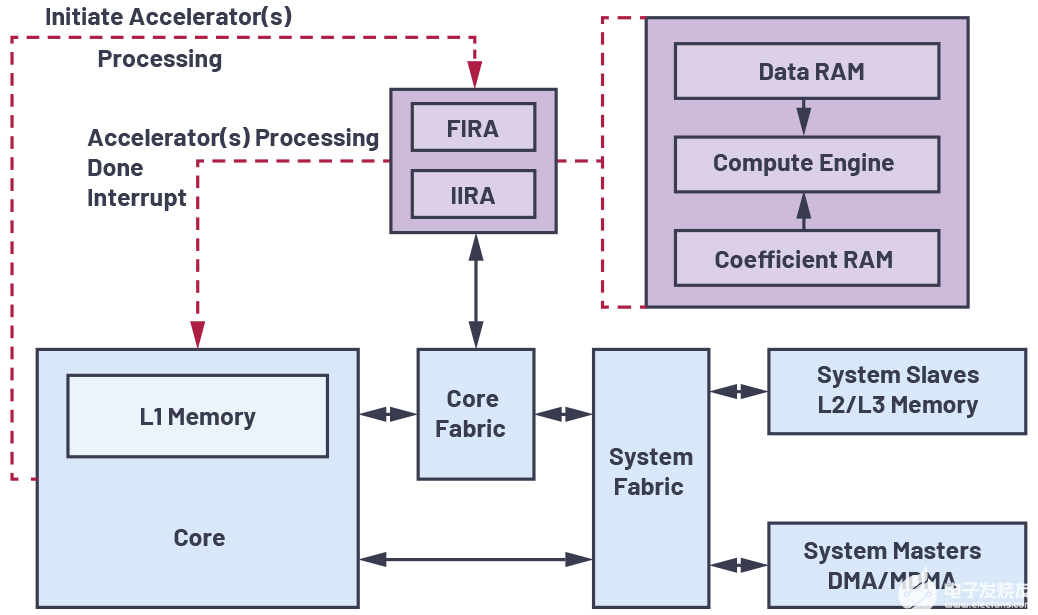
利用数字信号处理器上的片上FIR和IIR硬件加速器





 工商网监
工商网监
评论