 如何控制伺服电机的模拟量
如何控制伺服电机的模拟量
一、引言
伺服电机作为现代工业自动化领域的重要执行机构,其控制精度、速度和稳定性直接影响到整个系统的性能。interwetten与威廉的赔率体系 量控制作为伺服电机控制的一种方式,因其高精度、高灵活性和高可靠性而受到广泛应用。本文将详细阐述伺服电机模拟量控制的基本原理、方法、步骤以及在实际应用中的注意事项,以期为相关威廉希尔官方网站 人员提供参考。
二、伺服电机模拟量控制的基本原理
伺服电机模拟量控制主要是通过模拟量信号来控制电机的运动。模拟量信号是一种连续的变化信号,在电路中常用电压、电流或电阻等表示。在伺服控制系统中,一般采用位置、速度、加速度等模拟量信号来控制电机的运动。模拟量控制的基本原理是:将控制信号转换为模拟量信号,经过信号调理、放大和调制后,驱动伺服电机按照预定的运动轨迹和速度进行运动。
三、伺服电机模拟量控制的方法
转矩控制
转矩控制是伺服电机模拟量控制的一种重要方法。通过外部模拟量的输入或直接的地址赋值来设定电机轴对外的输出转矩的大小。具体表现为,例如10V对应5Nm,当外部模拟量设定为5V时,电机轴输出为2.5Nm。如果电机轴负载低于2.5Nm,电机正转;负载等于2.5Nm时,电机不转;负载大于2.5Nm时,电机反转。转矩控制主要应用于对材质的受力有严格要求的缠绕和放卷的装置中,如绕线装置或拉光纤设备。
位置控制
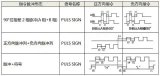
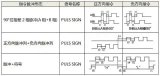
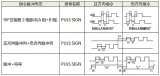
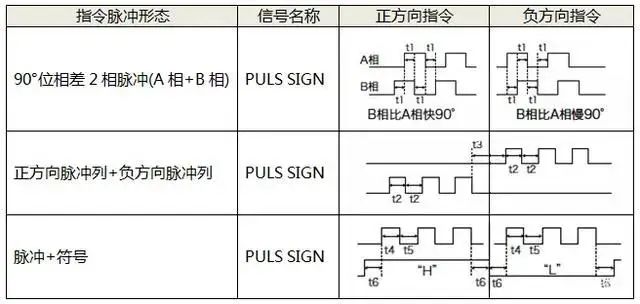
位置控制是伺服电机模拟量控制的另一种常用方法。位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度。有些伺服电机也可以通过通讯方式直接对速度和位移进行赋值。位置控制模式对速度和位置都有很严格的控制,因此一般应用于定位装置。
速度控制
速度控制是通过模拟量的输入或脉冲的频率来进行转动速度的控制。在有上位控制装置的外环PID控制时,速度控制模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。速度控制适用于需要精确控制电机转速的场合。
四、伺服电机模拟量控制的步骤
初始化参数
在接线之前,首先进行参数初始化。在控制器上选好控制方式,将PID参数清零,让控制器上电时默认使能信号关闭,并将此状态保存,确保控制器再次上电时即为此状态。在伺服驱动器上设置控制方式,设置使能由外部控制,编码器信号输出的齿轮比,以及设置控制信号与电机转速的比例关系。
接线
将控制器断电,连接控制器与伺服之间的信号线。必须连接的线包括控制器的模拟量输出线、使能信号线和伺服输出的编码器信号线。复查接线无误后,将电机和控制器上电。此时电机应该不动,且可以用外力轻松转动。如果不是这样,检查使能信号的设置与接线。
试方向
对于闭环控制系统,如伺服电机控制系统,需要测试电机的转动方向。通过改变控制信号的极性,观察电机的转动方向是否与控制信号一致。如果不一致,需要调整控制信号的极性或更换电机相序。
调试与测试
根据实际需求进行调试和测试。通过改变模拟量信号的输入值,观察电机的运动状态是否符合预期。同时,可以通过上位机软件对电机进行实时监控和调试,以便更好地掌握电机的运动状态和控制效果。
五、伺服电机模拟量控制的注意事项
控制信号的稳定性
控制信号的稳定性直接影响到伺服电机的运动精度和稳定性。因此,需要确保控制信号的稳定性,避免外界干扰和噪声的影响。
参数的合理设置
参数的合理设置是伺服电机模拟量控制的关键。需要根据实际需求和控制效果进行参数的调整和优化,以达到最佳的控制效果。
接线与安装的准确性
接线和安装的准确性直接影响到伺服电机的运动精度和稳定性。因此,需要严格按照说明书和图纸进行接线和安装,确保每个连接点都牢固可靠。
维护与保养
定期对伺服电机进行维护和保养是确保其长期稳定运行的关键。需要定期清洁电机表面和内部部件,检查电缆和连接器的状态,及时更换磨损的部件。
六、结论
伺服电机模拟量控制作为一种高精度、高灵活性和高可靠性的控制方式,在现代工业自动化领域得到了广泛应用。通过本文的介绍,相信读者对伺服电机模拟量控制的基本原理、方法、步骤以及注意事项有了更深入的了解。在实际应用中,需要根据具体需求和实际情况进行选择和调整,以达到最佳的控制效果。
-
模拟量
+关注
关注
5文章
491浏览量
25543 -
伺服电机
+关注
关注
85文章
2046浏览量
57829 -
控制电机
+关注
关注
0文章
240浏览量
18125
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论