 伺服电机驱动器的作用与工作原理
伺服电机驱动器的作用与工作原理
一、引言
伺服电机驱动器,作为现代运动控制领域的重要组成部分,以其高精度、高性能的位置控制功能,广泛应用于工业自动化、机器人、数控机床、医疗设备等多个领域。本文将深入探讨伺服电机驱动器的作用、工作原理及其在各领域的应用,以期为相关领域的专业人士提供参考。
二、伺服电机驱动器的作用
伺服电机驱动器,又称为“伺服控制器”或“伺服放大器”,是一种用来控制伺服电机运动的电子设备。其核心作用在于实现对伺服电机运动的高精度控制,包括位置控制、速度控制和力矩控制等方面。以下是伺服电机驱动器的主要作用:
位置控制:伺服电机驱动器通过精确控制伺服电机的旋转位置,确保电机按照预定的位置和轨迹运动。这种高精度定位功能对于需要精确控制位置的应用场景至关重要,如工业机器人、数控机床等。
速度控制:伺服电机驱动器可以调整伺服电机的运行速度,实现精确的速度控制。这一功能在需要变速运动的场合非常有用,如自动化设备中的输送带、升降机等。
力矩控制:部分伺服电机驱动器具备力矩控制功能,能够确保电机输出特定的扭矩或力。这对于需要精确控制力矩的应用场景,如机器人臂的力矩控制,具有重要意义。
回馈控制:伺服电机驱动器通常与伺服电机编码器或其他位置传感器结合使用,以提供实时反馈信息。这使得驱动器能够根据电机的实际运动情况调整控制策略,弥补任何位置误差,实现更高的控制精度。
运动配置和参数调整:伺服电机驱动器通常具有用户可配置的参数,以适应不同的应用需求。这些参数可以调整电机的性能,如加速度、减速度、反应时间等,以满足特定场景下的运动控制需求。
三、伺服电机驱动器的工作原理
伺服电机驱动器的工作原理主要基于内部控制系统,通过接收外部命令信号并将其转换为电机运动的指令信号,实现对伺服电机的精确控制。以下是伺服电机驱动器工作原理的详细解释:
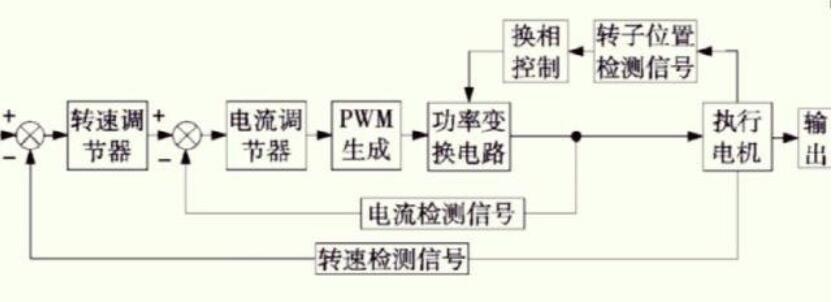
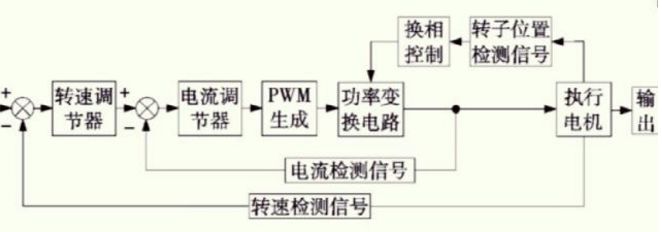
控制系统组成:伺服电机驱动器的控制系统由测量、比较和控制三个主要部分组成。测量部分用于检测电机运动的实际值;比较部分将实际值与所需值进行比较;控制部分则根据比较结果通过电路控制电机的运动。
信号处理:伺服电机驱动器接收来自上位控制系统的命令信号,如位置、速度和力矩等指令。然后,驱动器将这些指令信号进行解码和转换,生成适合电机运动的指令信号。
电机控制:伺服电机驱动器通过控制电机的电流、电压等参数来实现对电机的运动控制。在位置控制中,驱动器通过比较实际位置与所需位置之间的误差来调整电机的运动;在速度控制中,驱动器通过调整电机的电压或电流来控制电机的转速;在力矩控制中,驱动器则通过控制电机的电流来输出特定的扭矩或力。
反馈机制:伺服电机驱动器通常与伺服电机编码器或其他位置传感器结合使用,以提供实时反馈信息。这些信息被驱动器用于监测电机的实际运动情况,并根据需要调整控制策略以实现更高的控制精度。
数字化、网络化和智能化:现代伺服电机驱动器普遍采用数字信号处理器(DSP)作为控制核心,可以实现复杂的控制算法和高速数据处理。同时,伺服电机驱动器还支持各种通信接口(如Modbus、CAN总线、以太网等),方便与上位控制系统进行通信和集成。此外,一些先进的伺服电机驱动器还具备自学习、自适应和故障诊断等智能化功能,提高了系统的可靠性和易用性。
四、伺服电机驱动器的应用领域
伺服电机驱动器广泛应用于工业自动化、机器人、数控机床、医疗设备等多个领域。以下是伺服电机驱动器在不同领域的应用示例:
工业自动化:在工业自动化生产线中,伺服电机驱动器被用于控制各种自动化设备和机器的运动,如输送带、升降机、包装机等。通过精确控制这些设备的运动轨迹和速度等参数,可以提高生产效率和产品质量。
机器人:在机器人领域中,伺服电机驱动器被用于控制机器人的各种动作和姿态。通过精确控制机器人的运动轨迹和速度等参数,可以实现机器人的高精度定位和稳定运动,提高机器人的工作效率和安全性。
数控机床:在数控机床领域中,伺服电机驱动器被用于控制机床主轴和进给轴的运动。通过精确控制这些轴的运动轨迹和速度等参数,可以实现高精度加工和复杂零件的加工制造。
医疗设备:在医疗设备领域中,伺服电机驱动器被用于控制各种医疗设备(如手术机器人、检查设备、治疗设备等)的运动。通过精确控制这些设备的运动轨迹和速度等参数,可以提高医疗设备的准确性和稳定性,为患者提供更好的医疗服务。
五、结论
伺服电机驱动器以其高精度、高性能的位置控制功能在现代运动控制领域发挥着重要作用。通过精确控制伺服电机的运动轨迹、速度和力矩等参数,伺服电机驱动器能够满足各种复杂应用场景下的运动控制需求。同时随着威廉希尔官方网站 的不断发展和创新未来伺服电机驱动器将在更多领域得到广泛应用并发挥更大的作用。
-
驱动器
+关注
关注
52文章
8228浏览量
146269 -
伺服电机
+关注
关注
85文章
2046浏览量
57820 -
伺服控制器
+关注
关注
2文章
86浏览量
18726
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论