 宏集智能机器人控制系统驱动高效生产
宏集智能机器人控制系统驱动高效生产
概述
近年来,工业自动化领域对智能机器人运动控制系统的需求不断增长。
常见的工业机器人运动控制方式有两种:一种是基于工控机和控制卡,功能强大但复杂、布线多、兼容性差;另一种是基于软PLC,使用个人计算机或嵌入式控制器,具有开放的体系结构、便于开发和维护,支持多种编程语言,不受威廉希尔官方网站 垄断限制。
宏集的MC系列控制器,结合了先进的CODESYS软PLC编程环境,为用户带来了无与伦比的优势和灵活性。
控制系统方案设计
宏集机器人控制系统采用一主多从的控制模式,主站采用宏集MC-Prime控制器,从站采用带EtherCAT接口的伺服驱动器,主站和从站之间采用工业以太网EtherCAT进行数据通讯。
软件开发平台在PC端采用CODESYS编程环境,支持基于IEC-61131-3的6种标准编程语言(梯形图,结构化文本,顺序功能图等),编译通过后固化到工控机上,直接发送指令控制机器人的运动。机器人控制系统模型如下图所示.

机器人控制系统架构
方案优势
1.支持多轴控制和丰富的运动算法
宏集MC-Prime控制器基于CODESYS平台进行开发,通过图形化编程界面和丰富的函数库使得编程变得简单而直观。例如,在Delta机器人控制过程中,可以将将三足机器人整体视为一个运动轴组,通过综合控制机器人的各个关节和动作,实现机器人的整体运动和姿态调整。
宏集MC-Prime控制器集成了CODESYS SoftMotion库的功能,为CNC和机器人控制带来了显著优势:
✔ 完整的CNC编程支持
宏集MC-Prime控制器结合CODESYS提供的符合DIN66025标准的3D CNC编辑器和G代码编程支持。这使得宏集MC控制器能够在IEC61131-3标准的上位编程环境中实现复杂的CNC控制,简化了CNC编程流程并提高了效率。
✔ 内置的CNC功能库
宏集MC-Prime控制器内置了所有必要的CNC POU库,包括几何数据处理、插补和运动学变换等。这些库使MC控制器成为一个强大的CNC控制平台,能够灵活应对不同的CNC应用需求。
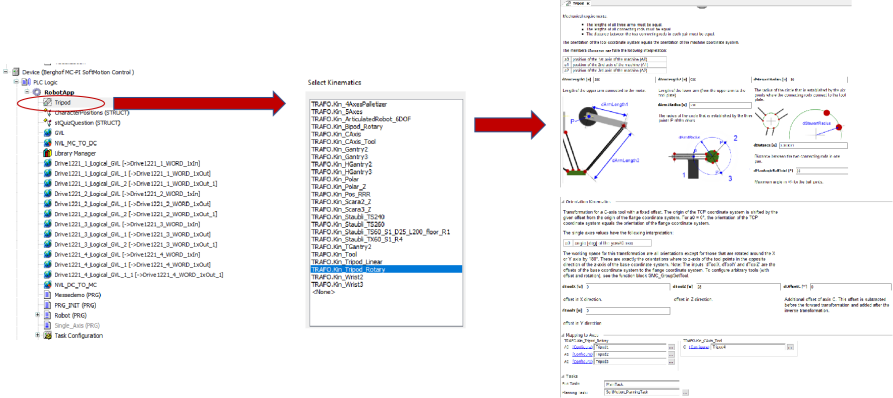
✔ 软件集成机器人控制
通过CODESYS SoftMotion Robotics库,宏集MC-Prime控制器支持轴组的运动学模型设置和机器人路径规划。它还支持PLCopen Part4标准功能块,提供了集成的机器人模型,包括各种龙门机器人、三足机器人和SCARA机器人等。
工程师可以通过调用SoftMotion运动库中的功能块,轻松地实现复杂的运动控制算法和逻辑,加快开发周期,提高生产效率。
2.高性能实时控制
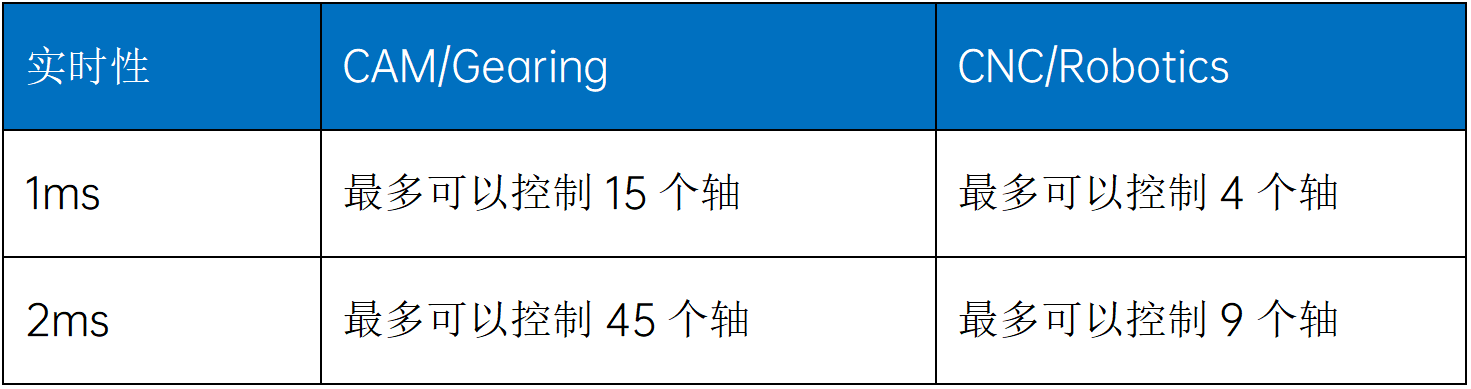
宏集MC系列控制器配备先进的多核处理器和实时操作系统,可以实现微秒级实时性和毫秒级的运动控制响应。这意味着用户可以实现高精度、高速度的机器人运动,确保生产过程的稳定性和效率。
宏集MC系列控制器进行多轴控制的轴数和实时性如下:
3.高安全性,SIL3, PLe安全等级
宏集SC安全控制器可以有效地监测和控制机器人运动过程中的安全风险,通过实时监测机器人位置、速度和周围环境,及时检测潜在的碰撞或危险情况。例如,通过安装安全传感器(如光栅、激光扫描器、安全摄像头等),安全控制器能够检测到人员进入危险区域,并及时停止机器人的运动,从而保护操作员的安全。

在工业生产中,机器人安全是一个重要的法规和标准要求。通过集成宏集SC安全控制器,可以使机器人系统满足高度严格的安全完整性要求(SIL 3)和机械安全性能要求(PL e),这种级别适用于对安全性能和机械可靠性要求都非常高的应用场景,可以帮助企业遵守相关的安全法规和标准,降低潜在的法律风险和责任。
P.S. SIL 分为 SIL 1 到 SIL 4,SIL 数字越高,表示系统在减少危险发生和控制风险方面的性能要求越严格;PL 分为 PL a 到 PL e,PL 级别越高,表示系统在执行安全功能时的性能要求越高。
总结
宏集MC系列控制器结合CODESYS编程环境和宏集SC安全控制器,为用户提供了全方位的智能机器人运动控制解决方案。这种集成提升了生产线灵活性和响应能力,简化了系统集成和维护。CODESYS开放架构和丰富函数库为宏集MC控制器提供定制和扩展能力,助力企业应对快速变化的生产需求,提高生产效率和可靠性。
审核编辑 黄宇
-
控制器
+关注
关注
112文章
16339浏览量
177859 -
控制系统
+关注
关注
41文章
6605浏览量
110581 -
机器人
+关注
关注
211文章
28390浏览量
206957 -
plc
+关注
关注
5010文章
13277浏览量
463117
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
智能机器人控制系统驱动高效生产

简述工业机器人控制系统的特点
机器人控制系统的基本单元有哪些
工业机器人控制系统的主要功能
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
富唯智能机器人控制系统:实现规模化柔性生产的智能引擎






 工商网监
工商网监
评论