 智行者联合清华完成国内首套全栈式端到端自动驾驶系统的开放道路测试
智行者联合清华完成国内首套全栈式端到端自动驾驶系统的开放道路测试
近日,智行者与清华大学车辆学院李克强院士、李升波教授领导的研究团队,完成了国内首套全栈式端到端自动驾驶系统的开放道路测试。依托车路云一体化智能网联驾驶架构,该团队研发的端到端自动驾驶系统涵盖了“感知-预测-决策-规划-控制”等全链路环节,从今年1月份率先启动了城市工况的开放道路验证,经过近4个月的内部测试,完成了各项性能的综合评估。这一工作为L3级及以上高级别自动驾驶系统的落地应用奠定了坚实的基础。
系统开发中,智行者主要贡献在于感知模型的构建与预训练,并与清华大学等单位共同完成了实车平台的搭建与开放道路测试。
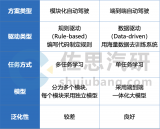
目前,处于L1、L2级智能驾驶系统主要依赖“模块分解”的设计思路,尽管部分模块(如感知、预测等)已经初步神经网络化,但是决策、规划、控制等模块仍然严重依赖人工规则和在线优化,缺乏利用数据进行闭环迭代的能力,这导致行车过程的智能性仍然不足。同时,模块间不可避免地存在较大信息损失,且各模块的优化目标存在一定冲突,不利于自动驾驶过程的综合性能提升。
与之相比,以全模块神经网络化为特征的“端到端”自动驾驶系统,因模块与模块之间的信息传递可依赖高维度特征向量,且神经网络具有充分的训练自由度,最大程度地减少了传感器到执行器之间的信息损失,使得全栈模块具备利用数据闭环进行快速更新的能力,这为高级别自动驾驶的智能性提升提供一条全新的威廉希尔官方网站 路径。
面向这一威廉希尔官方网站 发展趋势,清华大学与智行者团队自2018年开始瞄准端到端自动驾驶领域进行深耕,重点突破决策、规划与控制领域的神经网络设计与训练难题。团队先后提出了面向高级别自动驾驶的集成式决控(IDC)开发框架,研发了综合性能国际领先的数据驱动强化学习算法(DSAC),首创了时空分离的交通参与者行为预测模型(SEPT),设计了具有动作平滑特性的控制型神经网络架构(LipsNet),开发了自主知识产权的最优控制策略近似求解器(GOPS),以蚂蚁搬家的精神逐一解决了端到端自动驾驶面临的一系列核心难题。
以此为基础,今年年初清华大学与智行者团队成功研制了首个从传感器原始数据到执行器控制指令的全栈神经网络化自动驾驶系统,并率先完成了城市工况开放道路的实车测试验证。
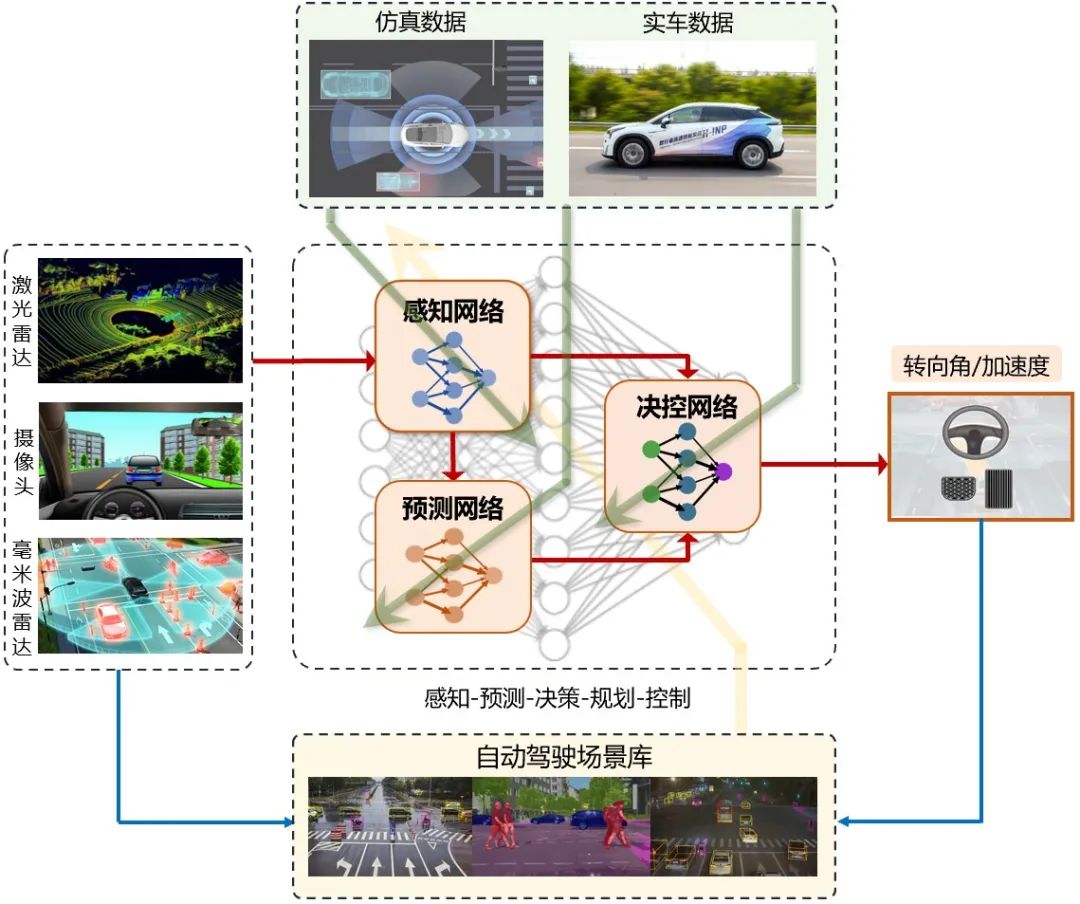
从感知到控制的全链路端到端自动驾驶系统原理图
清华大学与智行者在这一研究工作中,形成了校企之间紧密配合、通力协作的联合攻关团队,共同完成了系统功能集成、性能评估迭代等后期任务。本研究获得国家“十四五”重点研发计划、国家自然科学基金以及清华大学自主科研计划支持。
-
传感器
+关注
关注
2550文章
51043浏览量
753113 -
自动驾驶
+关注
关注
784文章
13786浏览量
166404 -
智能网联
+关注
关注
4文章
605浏览量
23234 -
智行者科技
+关注
关注
0文章
22浏览量
973
原文标题:智行者联合清华大学等单位完成国内首套端到端自动驾驶系统的开放道路测试
文章出处:【微信号:idriverplus,微信公众号:智行者科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

端到端自动驾驶威廉希尔官方网站 研究与分析
端到端在自动泊车的应用



Waymo利用谷歌Gemini大模型,研发端到端自动驾驶系统


FPGA在自动驾驶领域有哪些应用?
理想汽车加速自动驾驶布局,成立“端到端”实体组织
广汽丰田携手Momenta推出端到端全场景智能驾驶方案
佐思汽研发布《2024年端到端自动驾驶研究报告》
理想汽车自动驾驶端到端模型实现

未来已来,多传感器融合感知是自动驾驶破局的关键
康谋方案 | 基于场景的端到端硬件在环(HiL)测试智能解决方案





 工商网监
工商网监
评论