 摄像头各标定参数的作用
摄像头各标定参数的作用
生长之路往往风雨交加,真正的生长之美不在于人生最终的高度,而是生长的过程中,我们内心能否保持足够的沉静,行动能否保持足够的韧性。
摄像头在生成一张图片时,首先通过外参矩阵将世界坐标系中的点映射到摄像头坐标系中。
然后,利用内参矩阵将摄像头坐标系中的点映射到相机坐标系中。
接着,应用畸变矩阵对相机坐标系中的点进行畸变校正,得到畸变后的点。
最后,根据畸变后的点在成像平面上的坐标,生成最终的图像。
外参矩阵
外参矩阵:现实世界点P(世界坐标)是怎样经过旋转R和平移t,然后落到另一个现实世界点(摄像机坐标系)上。 车载摄像头的外参矩阵描述了摄像头在世界坐标系中的位置和姿态,主要包括旋转矩阵-R和平移向量-t,用于将相机坐标转换为世界坐标。外参矩阵通常表示为一个4x4的矩阵,记为,其中�R为3x3的旋转矩阵,�t为3x1的平移向量。外参矩阵的一般形式如下:
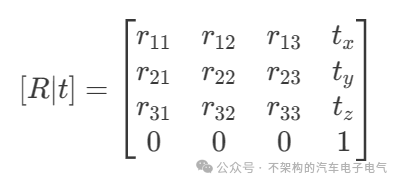
其中,rij表示的是旋转矩阵的元素,tx,ty,tz,标示的是平移向量的分量。外参矩阵的作用是将相机坐标系(Xc,Yc,Zc)映射到世界坐标系(Xw,Yw,Zw)
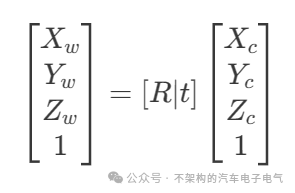
通过外参矩阵,可以实现相机坐标到世界坐标的转换,为摄像头在三维空间中的定位和姿态估计提供了基础。
内参矩阵 内参矩阵:点P在2的基础上,是如何继续经过摄像机的镜头、并通过针孔成像透视变换成为像素点(图像坐标系);
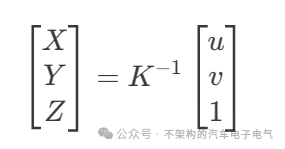
核心作用:通过内参矩阵,可以实现像素坐标到相机坐标的转换,为后续的摄像头标定、三维重建等任务提供了基础; 车载摄像头的内参矩阵描述了摄像头的内部特性,主要包括焦距、主点坐标等参数,用于将像素坐标转换为相机坐标。内参矩阵通常表示为一个3x3的矩阵,记为�K,其一般形式如下:
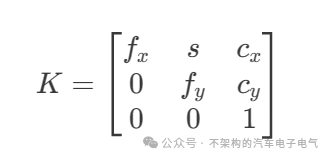
其中,��fx和fy表示相机的焦距,cx和cy表示主点的坐标,s表示可能的非正交性参数。内参矩阵的作用是将像素坐标系(u,v)映射到相机坐标系(X,Y,Z)
畸变矩阵
畸变矩阵:上面那个像素点并没有落在理论计算该落在的位置上,还tm产生了一定的偏移和变形!!!
车载摄像头的畸变矩阵描述了摄像头镜头造成的畸变,主要包括径向畸变和切向畸变等参数。畸变矩阵的作用是对图像进行畸变校正,使其更符合几何规律,提高图像的准确性和质量。
具体来说,畸变矩阵可以对图像中的畸变进行校正,包括以下两种主要畸变:
畸变矩阵的形式一般如下:D=[k1 k2 p1 p2 k3]
其中,k1k2k3为径向畸变参数,p1 p2为切向畸变参数。
径向畸变(Radial Distortion):由于镜头制造和装配的不完美性,导致图像中心和边缘的像素位置发生偏差,表现为图像中心的拉伸或压缩效应,k1k2k3控制了镜头的径向畸变,主要用来描述图像中心附近的畸变情况,k1k2通常是主要的径向畸变参数,K3通常用于更精细的畸变校正
备注:当K1>0表示图像的中心附近的像素位置被压缩,造成的凸型畸变;当K1<0时,表示图像中心附近的像素位置被拉伸,造成的凹型畸变;
切向畸变(Tangential Distortion):由于镜头和图像平面之间的不平行或者不垂直造成的畸变。切向畸变可以通过畸变矩阵进行校正,使图像中的水平和垂直线更加准确,用参数p1 p2表达;
通过对图像进行畸变校正,可以提高后续图像处理和计算的准确性,例如在目标检测、跟踪和三维重建等应用中,畸变矩阵的作用至关重要。
审核编辑:黄飞
-
摄像头
+关注
关注
59文章
4837浏览量
95601 -
镜头
+关注
关注
2文章
506浏览量
25634 -
车载摄像头
+关注
关注
5文章
137浏览量
28068
原文标题:一句话说清楚摄像头各标定参数的作用
文章出处:【微信号:不架构的汽车电子电气,微信公众号:不架构的汽车电子电气】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论