 伺服编码器分辨率越高越快吗
伺服编码器分辨率越高越快吗
伺服编码器分辨率越高越快吗
伺服编码器分辨率指的是编码器能够提供的位置或运动信息的精度或精确度,具体表现为编码器能够将运动转换为脉冲或位置信号的精细程度。通常以线数(Lines)或脉冲数(Pulses)来表示编码器的分辨率。较高的分辨率意味着编码器能够提供更精确的位置或运动反馈信息。
然而,关于伺服编码器分辨率与速度之间的关系,并没有直接的等号关系。分辨率高主要代表编码器的精度和位置信息的细致程度,而速度更多地与编码器的响应速度有关。响应速度是指编码器在接收到信号后的反应快慢,如果响应迟钝,就像在理想的传感器后串联了一个低通滤波器,这会导致整个闭环控制系统中产生相位滞后,影响整个系统的高频段稳定性。
目前大多数应用中,伺服电机的编码器反馈速度非常快,可以看作是理想的传感器。但某些通信速度较低的串行通信编码器(如SSI)可能会因为通信方式导致一定的延迟,从而限制了速度环的带宽。
分辨率(resolution)
分辨率是指编码器每个计数单位之间产生的距离,它是编码器可以测量到的最小的距离。
对于旋转编码器Q来说,分辨率一般定义为编码器旋转一圈所测量的单位或者脉冲(如,PPR)。
而对于直线编码器来说,分辨率常常被定义为两个量化单位之间产生的距离,通常给定的单位是微米(um)或者纳米(nm)。
绝对值编码器分辨率一般被定义为位的形式,因为绝对值编码器输出是基于编码器实际位置的二进制°字“”。一位是一个二进制单位,如16位等于2^16,或者65536。因此,一个16位编码器每圈提供65536个量化单位。
精度(accuracy)
精度用于衡量正常情况下实际值和设定值之间可重复的平均偏差的量值,对于旋转编码器来说,一般被定义为角秒或者角分,同时对于直线编码器来说精度一般为微米。
一个很重要的需要注意的一点是,高的分辨率并不代表高的精度。
例如,两个同样精度的旋转编码器,一个分辨率是3600 PPR,而另外一个是10000 PPRo
低分辨率的编码器(360O PPR)可以提供0.1°的测量距离,而高分辨率的编码器可以提供一个更小的测量距离,但是二者的精度是相同的,高分辨率编码器仅仅是具有将0.1°缩小到更小的增量距离的能力。
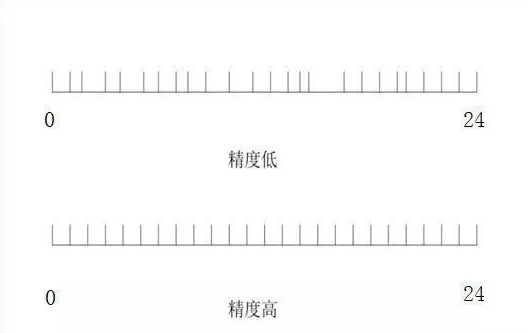
编码器分辨率和精度是两个独立的概念,如上图所示,两个编码器具有相同的分辨率(24PPR)但是具有不同的精度。当我们讨论精度的时候,一般还会涉及到另外一个编码器的性能指标—“可重复性”。
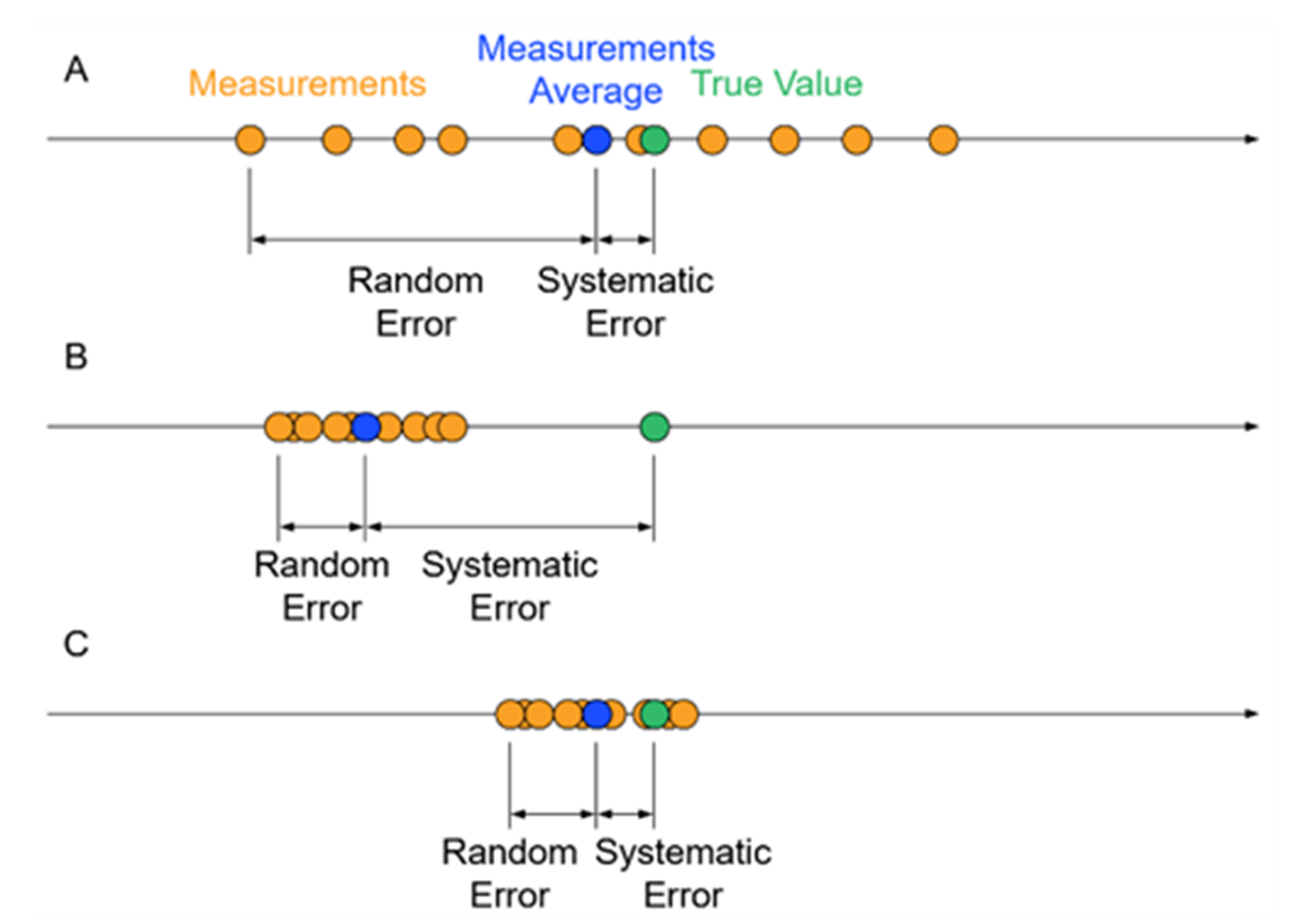
精度是指测量值与真实值之间的接近程度,不与标准进行比较,精度就无从谈起。
“可重复性“是指在外部状态不变的情况下,重现相同结果的能力。某些情况下,“可重复性”可能比精度更加重要。这是因为,如果系统具有可重复性,那么可以通过补偿取消掉误差。
一般来说编码器的可重复性被定义为编码器精度的倍率,常常是5到10倍的编码器精度值。
伺服编码器分辨率18位和24位区别
伺服编码器的分辨率是指它能够测量并输出的位置信息的精度。18位和24位分辨率表示编码器可以输出的位置值的位数,这两者之间有显著的区别:
1. **18位分辨率**:
- 18位分辨率的编码器能够输出最多 2^18(262,144)个不同的位置值。
- 这种分辨率通常用于一般的运动控制应用,如工业自动化、数控机床等,对精度要求不是特别高的场合。
- 对于较小的运动范围或速度较慢的应用来说,18位分辨率通常足够满足需求,而且价格相对较低。
2. **24位分辨率**:
- 24位分辨率的编码器能够输出最多 2^24(16,777,216)个不同的位置值,比18位分辨率更高。
- 这种高分辨率通常用于对位置精度要求较高的应用,如精密加工、医疗设备、半导体制造等需要更精确控制位置的领域。
- 24位分辨率编码器可以提供更精细的位置控制,适用于高速运动、高精度定位或要求更高精度的应用场合。
- 由于其高精度和性能,24位编码器通常价格较高。
总的来说,18位和24位分辨率的伺服编码器适用于不同的应用场景,选择取决于具体的需求和预算。18位分辨率通常适用于一般工业控制应用,而24位分辨率则更适用于对位置精度要求较高的应用。
审核编辑:黄飞
-
控制系统
+关注
关注
41文章
6605浏览量
110581 -
编码器
+关注
关注
45文章
3639浏览量
134440 -
伺服电机
+关注
关注
85文章
2046浏览量
57826 -
伺服编码器
+关注
关注
5文章
15浏览量
3097
发布评论请先 登录
相关推荐
光学编码器分辨率的定义方法
伺服电机编码器精度与分辨率
编码器怎么计算距离,编码器分辨率是什么
编码器的分辨率如何理解?
旋转编码器的分辨率如何选择?
影响编码器分辨率和精度的因素
选择增量编码器分辨率的方法,影响增量式编码器分辨率的因素

伺服编码器分辨率越高越快吗?






 工商网监
工商网监
评论