 CMOS图像传感器为自动驾驶汽车提供视觉感知
CMOS图像传感器为自动驾驶汽车提供视觉感知
来源:安森美,谢谢
编辑:感知芯视界 Link
要实现全自动驾驶汽车,需要整合来自多种传感器的信息,其中摄像头的信息可能是最重要的。这些摄像头必须能够在各种条件下连续捕捉最微小的细节,以确保车辆乘客和其他道路使用者的安全。本文将探讨在选择图像传感器时需要注意的关键特性,以便为自动驾驶汽车提供所需的出色功能组合。
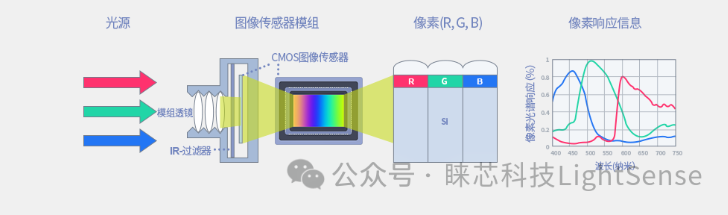
图像传感器负责将光子转化为电子,然后存储为数字图像数据。如今,图像传感器广泛应用于各种摄像头视觉应用,包括智能工厂、医学成像和汽车领域。图像传感器的选择取决于给定应用所需的性能水平。在决定使用哪种图像传感器时,首先需要了解所需的帧率、预期的照明条件和所需的系统容限,但如果缺乏视觉系统方面的工程专业知识,可能会让这个过程变得艰巨。好在有几种标准可以用来比较不同图像传感器的性能。
01传感器分辨率和灵敏度
在测量精度至关重要的应用中,传感器分辨率是一项关键指标,因为它决定了捕捉图像的感光表面行和列上的像素数量。所需的最小像素数量取决于图像中需要检测的最小特征。虽然理论上每个维度只需 2 个像素即可解析物体的单个特征,但对比度不足和图像噪声意味着实际应用中至少需要 4 或 5 个重叠像素,才能完全解析一个特征。
灵敏度衡量传感器将光子转化为电子的效率,在几乎所有应用中都很重要。它衡量传感器识别可用图像所需的时间和照度(照明)。灵敏度还受到传感器噪声的影响,因此信噪比 (SNR) 是一项重要指标。具有高信噪比的传感器可在低光条件下提供更高质量的图像。灵敏度在监控和医疗应用中尤为重要,因为这些应用即使在低光条件下也需要高质量的图像。虽然图像传感器资料手册提供了灵敏度指标,但有时很难比较不同制造商生产的传感器的灵敏度。自动驾驶汽车即使在低光(近乎黑暗)的条件下,也需要高水平的细节,因此在选择图像传感器时,必须仔细考虑分辨率和灵敏度这两项关键指标。
02动态范围和帧率
动态范围是指一个像素的最小(噪声)信号与其最大阱容之间的比值,它定义了图像中存在多少不同亮度级别。在具有极端光照条件的应用中,这是一个特别重要的特性。动态范围指标基于欧洲机器视觉协会 (EMVA)1288 标准,并以分贝 (dB) 为单位,因此可以轻松地根据大多数传感器资料手册进行比较。
帧率是传感器的速度指标,以每秒读取的图像(帧)数 (fps) 来衡量。在捕捉快速移动物体的应用中,高帧率非常重要,因为需要较短的曝光时间,以防止出现模糊和减少运动伪影。随着传感器像素数量增加,可实现的最大帧率会降低。例如,使用低质量的视频图形阵列 (VGA) 图像传感器可以实现更高的帧率,而使用全分辨率 2000 万像素传感器则无法达到同样的效果。支持“感兴趣区域”(ROI) 的传感器可以将高帧率与高分辨率结合起来。这类传感器会确定图像中要进行处理的一个或多个区域,而忽略图像的其他所有区域。这有效降低了整体图像分辨率,因而能够实现更高的帧率。与标准汽车一样,自动驾驶车辆在高速行驶过程中会遇到各种光照条件,因此在选择图像传感器时,高动态范围和高帧率是至关重要的特性。
03运动与色彩
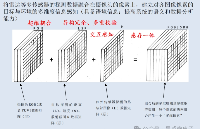
CMOS 图像传感器使用的两种读出方法是卷帘快门和全局快门。卷帘快门法在曝光时逐行读出传感器的像素,因此是一种非常快速的威廉希尔官方网站 。与使用全局快门的传感器相比,它每个像素使用的晶体管数量更少、噪声更小、灵敏度更高,且成本更低。建议在需要高动态范围的应用中使用卷帘快门传感器。在全局快门读出方法中,每个像素会同时曝光,因此像素行之间没有捕捉延迟。然而,这种方法既昂贵又难以实现。
在测量记录和存在检测等应用中,可以接受采用黑白图像传感器,但现在许多应用都需要彩色图像。不过,黑白传感器也具有一些优势。为了使传感器提供彩色图像,需要在像素级别以拜尔模式排列 RGB 滤光片。不过,拜耳色彩插值会导致细节和整体测量精度降低。因此,只有在应用需要色彩信息时,才需要使用彩色传感器。显然,自动驾驶汽车应用需要捕捉彩色图像并使用卷帘快门传感器。
04像素大小
有一种误解是,像素越大,图像质量就越好。虽然较大的像素有更多面积可用于收集光线,但并不意味着可以获得更高质量的图像。需要注意的是,分辨率和像素噪声指标等因素在决定图像质量方面也起着重要作用。较小的像素往往具有较低的暗信号不均匀性 (DSNU);在较高温度下,暗信号不均匀性会限制低光性能。在某些情况下,像素较小的传感器性能会优于像素较大的传感器。在设计摄像头系统时,必须考虑在速度、灵敏度和图像质量特性之间取得良好的平衡,以实现出色的性能。
审核编辑 黄宇
-
CMOS
+关注
关注
58文章
5705浏览量
235329 -
图像传感器
+关注
关注
68文章
1893浏览量
129509 -
测量
+关注
关注
10文章
4824浏览量
111215 -
自动驾驶汽车
+关注
关注
4文章
376浏览量
40828
发布评论请先 登录
相关推荐
多传感器融合在自动驾驶中的应用趋势探究






 工商网监
工商网监
评论