 rs和sr触发器的工作原理 为什么rs触发器可以消除机械抖动
rs和sr触发器的工作原理 为什么rs触发器可以消除机械抖动
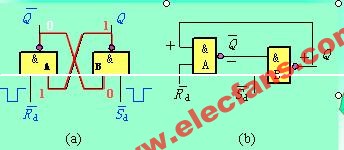
RS触发器与SR触发器都是基本的数字逻辑电路元件,常用于存储、控制和时序电路中。它们的工作原理如下:
1.RS触发器:
*当输入端R和S都为高电平时,RS触发器保持上一个状态不变。
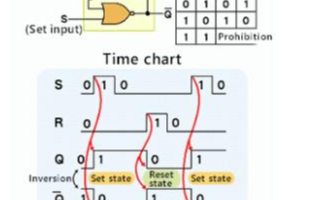
*当R为低电平,S为高电平时,Q为高电平,Q’为低电平。这将触发触发器进入“置位”状态。
*当S为低电平,R为高电平时,Q为低电平,Q’为高电平。这将触发触发器进入“复位”状态。
*当R和S同时为高电平时,触发器进入禁止状态,输出无效,状态不确定。
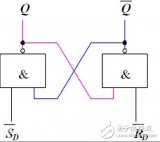
2.SR触发器:
*当S和R都为高电平时,SR触发器保持上一个状态不变。
*当S为高电平,R为低电平时,Q为高电平,Q’为低电平。这将触发触发器进入“置位”状态。
*当R为高电平,S为低电平时,Q为低电平,Q’为高电平。这将触发触发器进入“复位”状态。
*当S和R同时为低电平时,触发器进入禁止状态,输出无效,状态不确定。
RS触发器和SR触发器的区别:
1.输入条件:RS触发器的置位和复位操作仅与R和S两个输入信号有关;而SR触发器的置位和复位操作不仅与S和R有关,还与Q和Q’的状态有关。
2.输出状态:在某些输入条件下,RS触发器会进入禁止状态,导致输出状态不确定;而SR触发器在某些输入条件下会直接进入禁止状态,但输出状态始终是确定的。
3.抗干扰性:由于RS触发器可以消除机械抖动的影响,因此在某些应用中具有更好的抗干扰性。
为什么RS触发器可以消除机械抖动:
机械抖动通常是由于触点的机械运动产生的短暂的、重复的信号跳动。在某些应用中,如开关的触点或按钮的机械运动可能导致信号的短暂跳动,这种跳动可能导致电路的误动作。
而RS触发器的工作原理可以有效地消除这种机械抖动的影响。当输入信号R或S发生变化时,无论这个变化是由于真实的信号变化还是由于机械抖动引起的,RS触发器都会根据相应的条件进行置位或复位操作。
这种快速响应的特性使得RS触发器能够有效地消除由机械抖动引起的信号干扰,从而提高电路的稳定性和可靠性。
总的来说,RS和SR触发器是数字电路中的基本元件,它们的工作原理和应用各有特点。RS触发器由于其独特的消除机械抖动的功能,在某些应用中具有更好的稳定性和可靠性。然而,具体的选择和应用还需要根据实际需求进行考虑。
-
信号干扰
+关注
关注
0文章
112浏览量
45939 -
RS触发器
+关注
关注
3文章
101浏览量
17935 -
SR触发器
+关注
关注
0文章
13浏览量
12631 -
数字逻辑电路
+关注
关注
0文章
106浏览量
15813 -
高电平
+关注
关注
6文章
148浏览量
21367
发布评论请先 登录
相关推荐

RS触发器工作原理_RS触发器逻辑功能_RS触发器和SR触发器的区别
RS触发器是什么?解读rs触发器的作用和数字电路中的rs触发器的作用





 工商网监
工商网监
评论