 AMD Kria KR260 DPU配置教程3
AMD Kria KR260 DPU配置教程3
最后我们需要生成能够在AMD KriaKR260 上运行的固件。
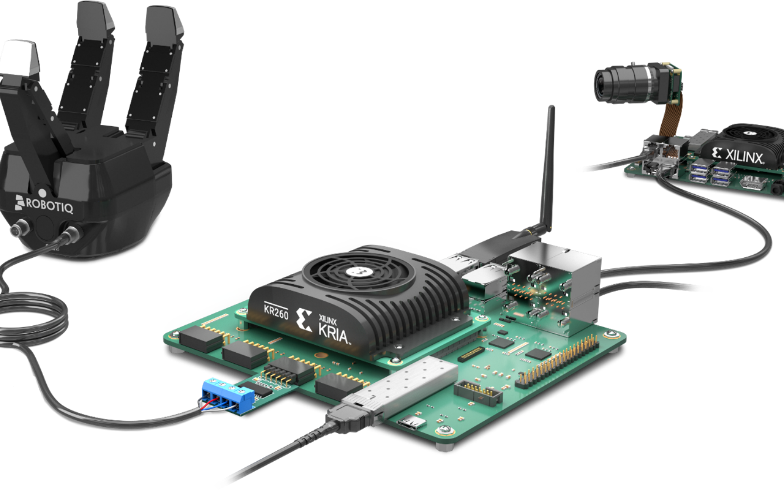
首先我们需要根据以下地址设置好 KR260 开发板:
为 platform 生成设备树文件。

执行完后,将在此目录下生成 pl.dtsi 文件:
device_tree/device_tree/pfmdevice/psu_cortexa53_0/device_tree_domain/bsp
创建固件时,我们将参考官方仓库:
git clone --branch xlnx_rel_v2022.1
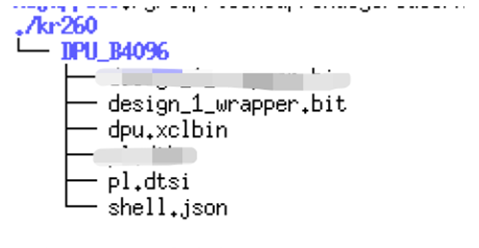
将最终的 bit 和 xclbin 文件,设备树文件 pl.dtsi,以及 shell.json 文件复制到文件夹下。文件夹结构应该类似于:
在 KR260 同级目录下运行 make,将生成最终可运行的固件。
将该目录通过 scp 命令上传到 KR260 开发板上。
运行:

将固件安装到开发板上,检查是否存在对应固件。
安装运行 dpu 所需要的包:

加载对应的固件:

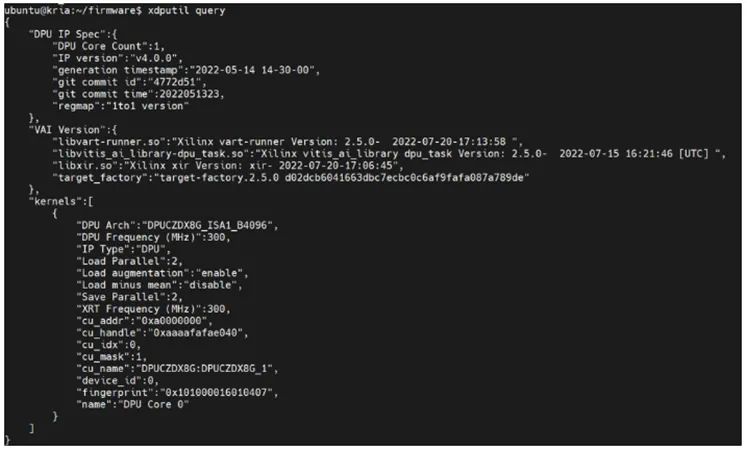
查询DPU是否存在:
下载测试模型(点击阅读原文,下载测试模型):

运行测试模型:
xdputil benchmark/usr/share/vitis_ai_library/models/resnet50_pt/resnet50_pt.xmodel 5
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
amd
+关注
关注
25文章
5466浏览量
134101 -
DPU
+关注
关注
0文章
357浏览量
24169 -
开发板
+关注
关注
25文章
5033浏览量
97381
原文标题:开发者分享|AMD Kria™ KR260 DPU 配置教程 3
文章出处:【微信号:gh_2d1c7e2d540e,微信公众号:XILINX开发者社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
AMD 机器人入门套件开启未来智慧工厂
2022 年 5 月 17 日,加利福尼亚州圣克拉拉 — AMD(超威,纳斯达克股票代码:AMD)今日宣布推出 Kria™ KR260 机器人入门套件,这是
AMD Kria KR260 DPU配置教程
这篇文章我们将为 AMD Kria KR260 在 AMD Vitis 上创建硬件加速平台。 我们将从 KR260 预设文件开始,添加平台所

AMD Kria KR260 DPU配置教程2
在上一篇文章中 开发者分享|AMD Kria KR260 DPU 配置教程 1 我们导出了 platform 的设计工程 XXX.xsa。接

AMD Kria™ KR 260套件+ROS 2快速开发机器人解决方案
在这个项目中,我们将配置AMD Kria™ KR 260机器人入门套件来控制Trossen Robotics ReactorX 150机器人

PROPHESEE 携手 AMD,推出业界首款兼容 Kria™ KV260 视觉 AI 入门套件的事件视觉解决方案
月 30 日,中国上海——领先的神经拟态视觉传感公司 Prophesee 宣布,其 Metavision® HD 事件视觉传感器和 AI 算法现已支持 AMD Kria™ KV260视觉 AI 入门
发表于 05-30 10:41
•963次阅读

【AMD KV260视觉入门开发套件试用】1、开箱&烧录镜像系统体验
Kria KV260 视觉 AI 入门套件官方介绍主页:
https://china.xilinx.com/products/som/kria
发表于 07-15 22:00
【KV260视觉入门套件试用体验】KV260开发板初使用
DDR4 内存。
3. Kria SOM还支持PYNQ,为嵌入式平台带来了Python生产力-MICRO-PYTHON
4. __除了支持PetaLinux和Yocto之外,Kria KV2
发表于 09-18 14:56
【KV260视觉入门套件试用体验】四、学习过程梳理&DPU镜像&Resnet50
/kria-apps-docs/kv260/2021.1/build/html/docs/smartcamera/docs/app_deployment.html
配套例程以及使用教程
四、DPU系统
https
发表于 09-26 15:21
Rpi SenseHAT与AMD-Xilinx Kria KR260和Petalinux的接口
电子发烧友网站提供《Rpi SenseHAT与AMD-Xilinx Kria KR260和Petalinux的接口.zip》资料免费下载
发表于 07-13 10:18
•0次下载

Kria KR260机器人入门套件:通过硬件加速释放机器人
电子发烧友网站提供《Kria KR260机器人入门套件:通过硬件加速释放机器人.pdf》资料免费下载
发表于 09-14 10:16
•4次下载
TRACO Power AC/DC工业电源产品特性
本期DigiKeyDaily 向大家推荐两款产品——TRACO Power TPI 50A-J系列AC/DC工业电源和AMD Xilinx Kria KR260机器人入门套件。





 工商网监
工商网监
评论