 一网打尽AUTOSAR MCAL模块
一网打尽AUTOSAR MCAL模块
一、简介
MCAL:微控制器抽象层;位于BSW层中的最下层;
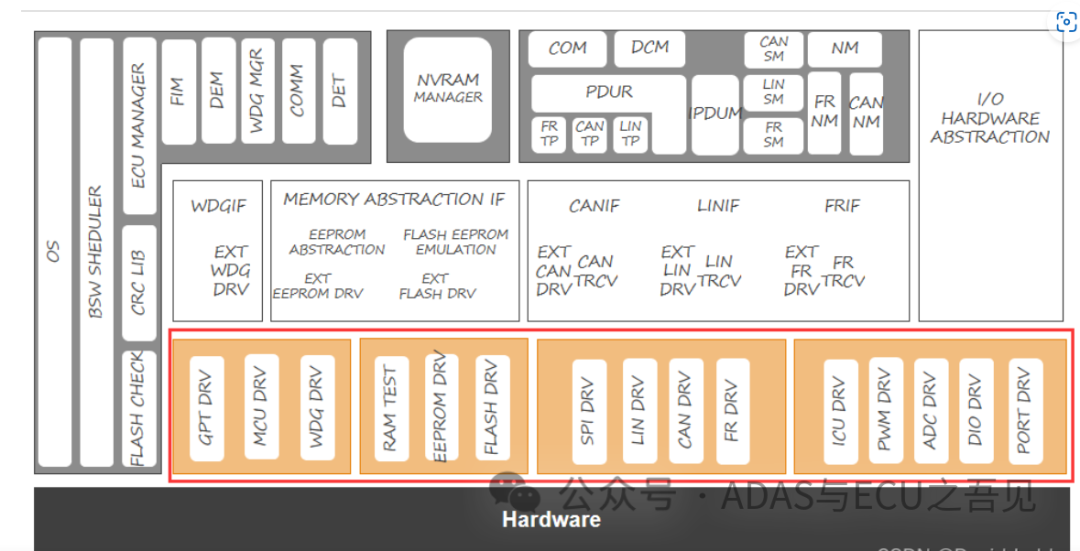
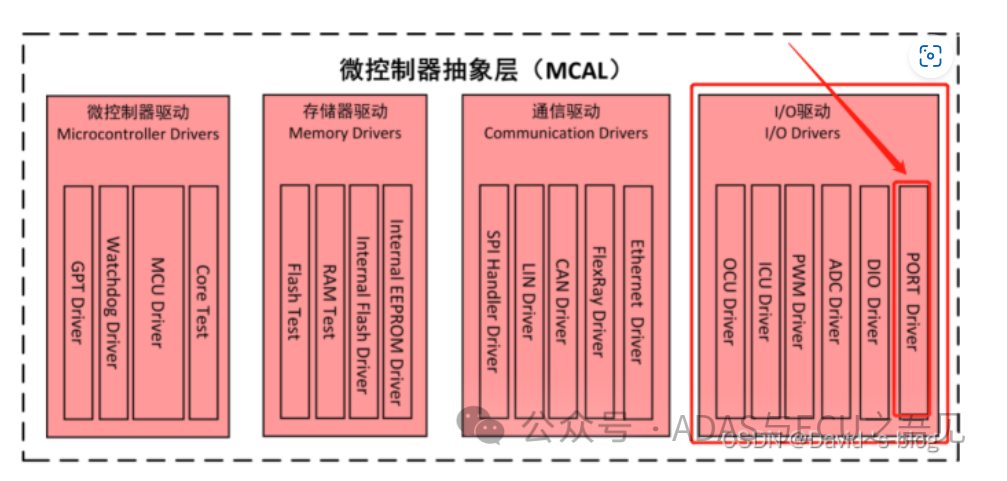
MCAL细分,可将驱动分为:微控制器驱动、存储器驱动、通信驱动、IO驱动:
二、MCAL的配置(EB-Tresos)
1.PORT
我理解的PORT:MCAL层中的IO驱动组中的pin脚总体配置:
Port就是芯片上的每个pin脚,可以配置成DIO ADC PWM ICU等单引脚的功能,也能配置成CAN的TX或者RX、SPI的MOSI等等其他1功能的单个pin脚功能;
总之,PORT就是芯片上的具体的某个引脚。
配置如下:
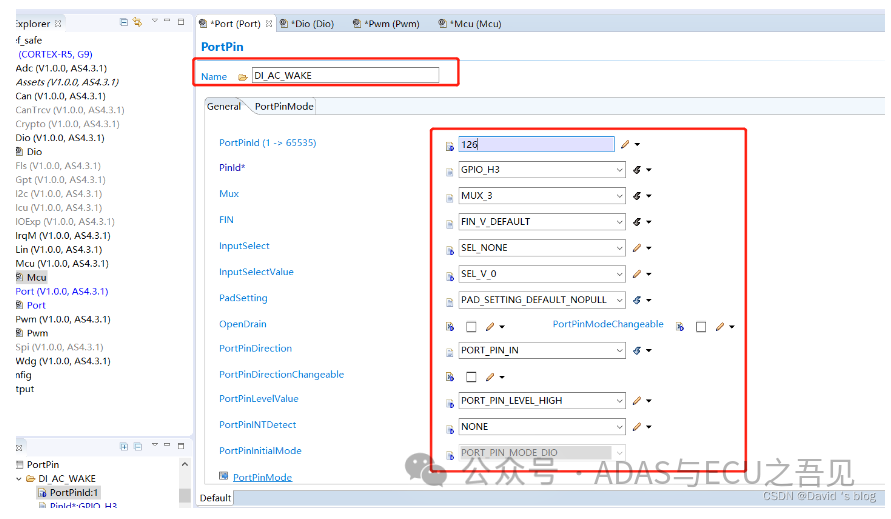
PortPinId:逻辑上的Id值,从1递增 PinId:对应[芯片XX]芯片手册的pin引脚ID,根据实际使用选择对应的pin引脚 Mux:选择PortPin用作哪个功能,最多八个,选择复用的功能需要查看TRM来选择 InputSelect:根据实际pin使用功能决定输入选择;比如Port用作IO Input 则选择SEL_NONE;比如用作CANFD1_Rx,则选择对应的CANFD1_Rx(参考[芯片XX]_Procesor_TRM_Rev_00.06_For_xxx.pdf的IO Control/PINCTRL_SAFETY/Input Source Select) PadSetting:需要根据该Port用作的功能进行选择,如果是GPIO则选择PAD_SETTING_DEFAULT,如果是CAN则选择PAD_SETTING_CAN;有些pin比较特殊,建议沿用之前的配置。 OpenDrain:是否启用开漏,选择是启用。 PortPinModeChangeable:是否启用在APP中更改PortPin的模式,一些特定场合会用到。 PortPinDirection: Port的方向,输入:PORT_PIN_IN, 输出:PORT_PIN_OUT PortPinDirectionChangeable:是否可以在程序运行过程中改变PortPin的方向(输入,输出)。 PortPinLevelValue:设置PortPin的初始化,只对Outout有效 PortPinInitialMode:不需要配置
2.DIO
DIO一共分为五组,如下图所示:
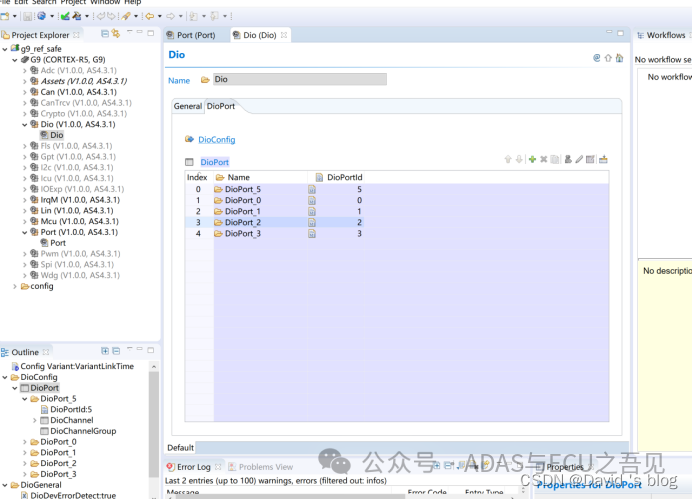
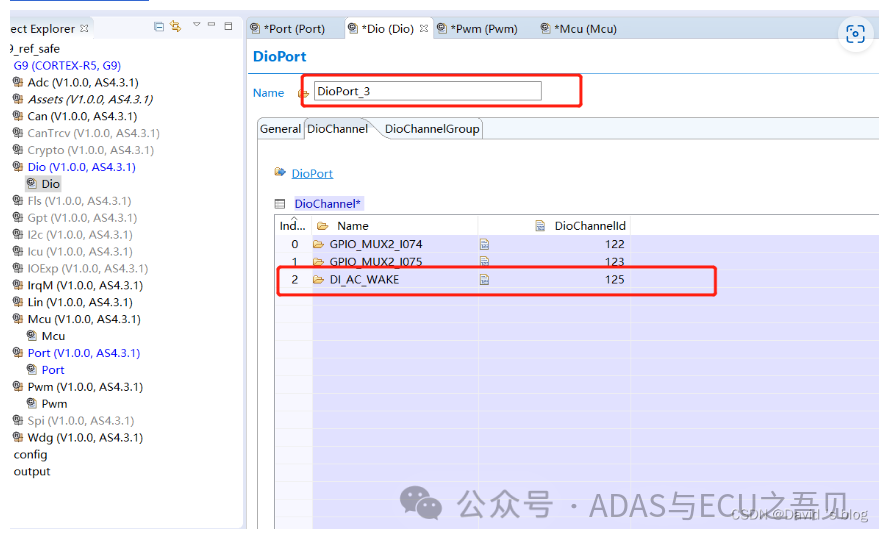
Dio没什么好配置的,只需要按照对应的ChannelId 更改下Name就好了。
3.ADC
[芯片XX]只有一个ADC内含8个通道,最大支持12位精度(8,10,12);
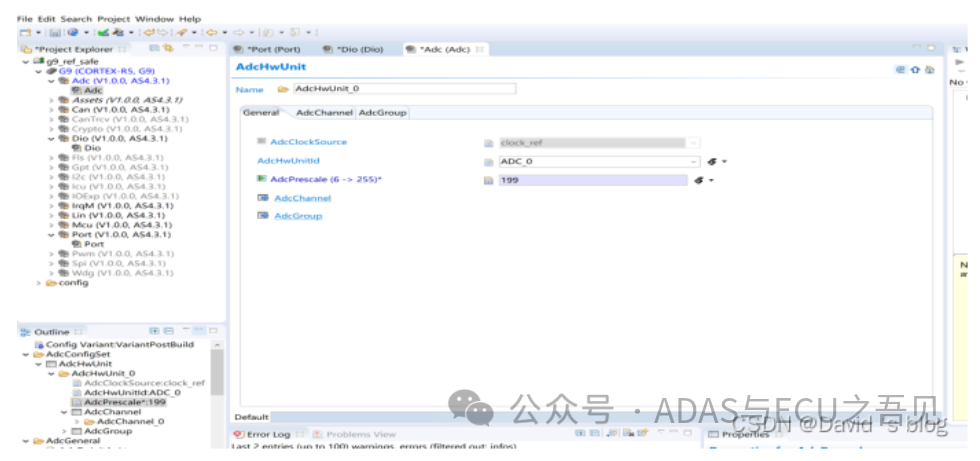
AdcPrescale: [公司]的[芯片XX]是填的199, BaseClock = 400MHz ,基于400MHz进行分频。
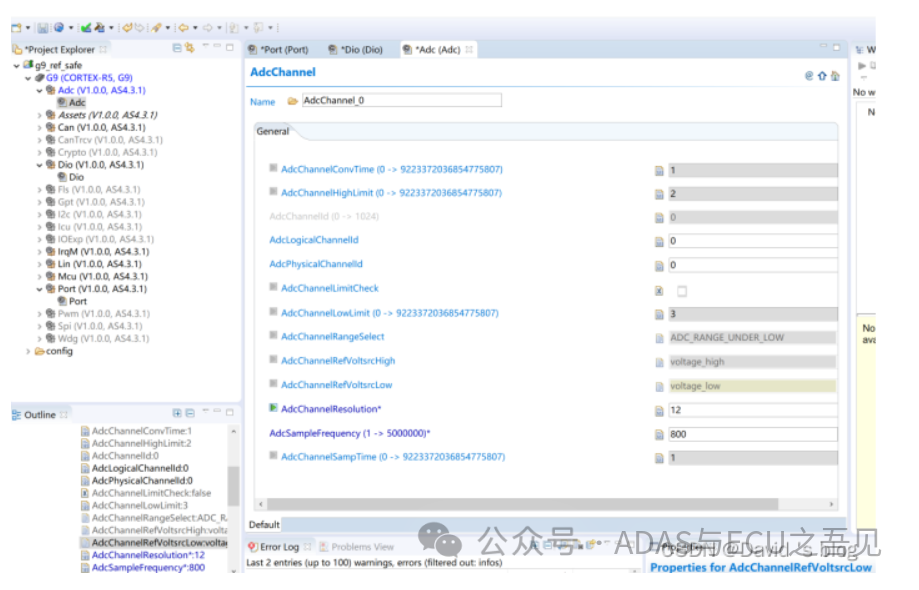
AdcLogicalChannelId:逻辑通道从0递增 AdcPhysicalChannelId:物理通道和逻辑通道保持一致,否则数据读取不正确 AdcChannelResolution:选择ADC的采样精度8/10/12 AdcSampleFrequency(Hz):通道的采样频率,ADC一共八个通道,代码中配置每个通道采样两次(MCAL暂时不能配置),内部FIFO的WaterLevel=64,按照配置中的800Hz来算(1/800hz*16)*64=5ms
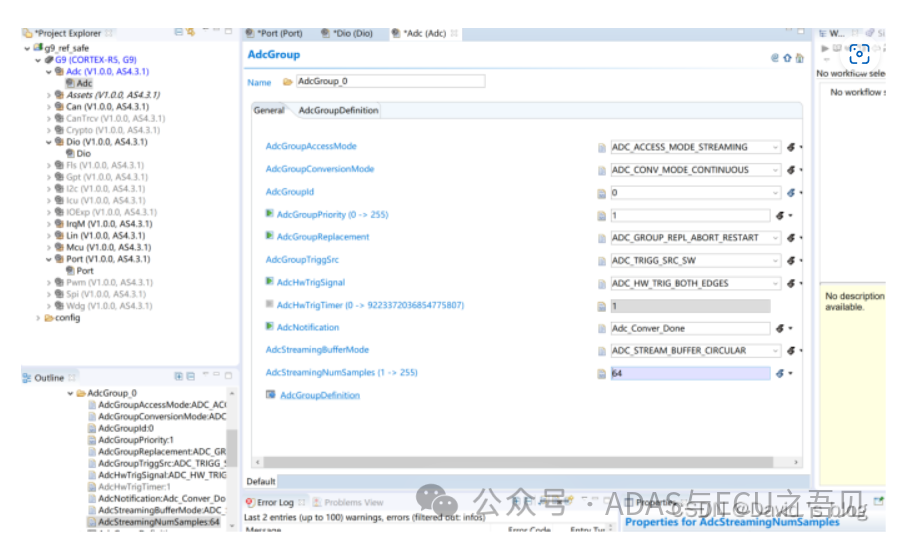 image-20240107211227399
image-20240107211227399
AdcGroupConversionMode:配置连续采样和单次采样,目前[芯片XX]只支持连续采样 AdcGroupTriggsrc:ADC_TRIGG_SRS_SW:由软件API调用促发的组 ADC_TRIGG_SRC_HW:由硬件触发的组 AdcNotification:[芯片XX]ADC采样必须使用中断模式,所以配置一个Notification进行数据处理。
4.CAN
4.1 CAN-General
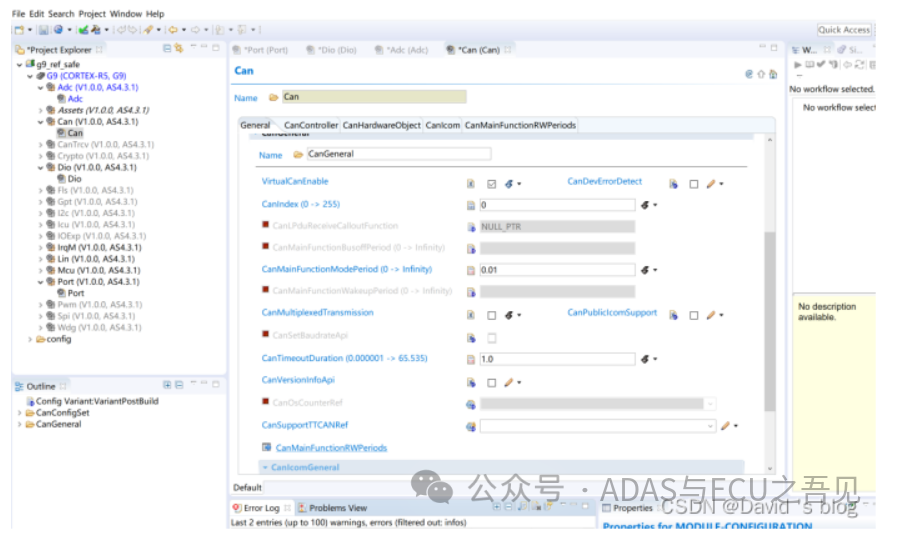
VirtualCanEnable:指定CAN消息是否由(SDPE)半驱动器包引擎路由。如果启用,所有的CAN驱动程序将由SDPE处理 CanDevErroDetect:指定是否在每个API中启用错误检测 CanIndec:对于[芯片XX]系列CAN驱动,该参数应该始终是0 CanLPduReceiveCalloutFunction:当收到帧时调用用户回调函数 CanMainFunctionBusoffPeriod:指定调用Can_MainFunction_BusOff的周期 CanMainFunctionWakeupPeriod:指定调用Can_MainFunction_Wakeup的周期 CanMainFunctionModePeriod:指定调用Can_MainFunction_Mode的周期 CanMultiplexedTransmission:是否支持多路传输,多路传输用于防止传输帧时的优先级反转 CanTimeoutDuration:指定阻塞功能的超时时间,例如模块的enable/disable, freeze/unfreeze在控制器的初始化,注意:目前不支持此配置 CanVersionInfoApi:指定是否支持Can_GetVersionInfo函数 CanSupportTTCANRef:[芯片XX]系列不支持TTCAN,因此不使用此配置。
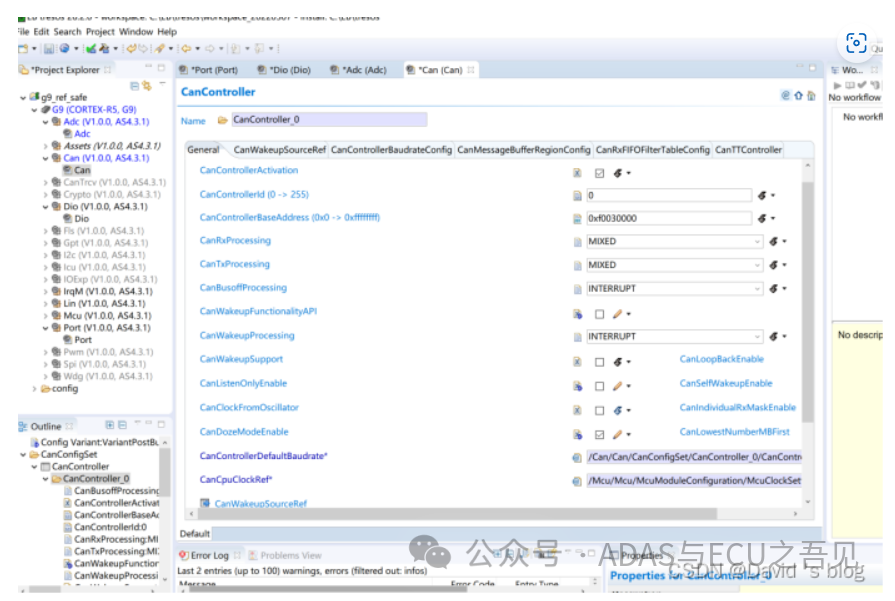
CanControllerActivation:Channel配置信息必须勾选此处才会生效 CanControlledId:需和DaVinci中的ControlledId保持一致,不一致时,实际通信过程中CAN通道以DaVinci中的配置为准,会导致通道开启错误,进而无法通信的问题。 CanControllerBaseAddress:要和CanControllerInstance保持一致,BaseAddress参考TRM手册。 例如:CAN1 0xF0030000 CAN 2 0xF0040000 CAN 3 0xF0050000… CanRxProcessing:INTERRUPT/POLLING CanTxProcessing:INTERRUPT/POLLING CanWakeupFunctionalityAPI:没验证过该功能 CanWakeupProcessing:INTERRUPT/POLLING CanWakeupSupport:没验证过该功能 CanIndividualRxMaskEnable:勾选启用Rxfiltermask功能 CanControllerDefaultBaudrate:需要现在CanControllerBaudrateConfig配置波特率,然后才能选择 CanCpuClockRef:Clock时钟选择24M
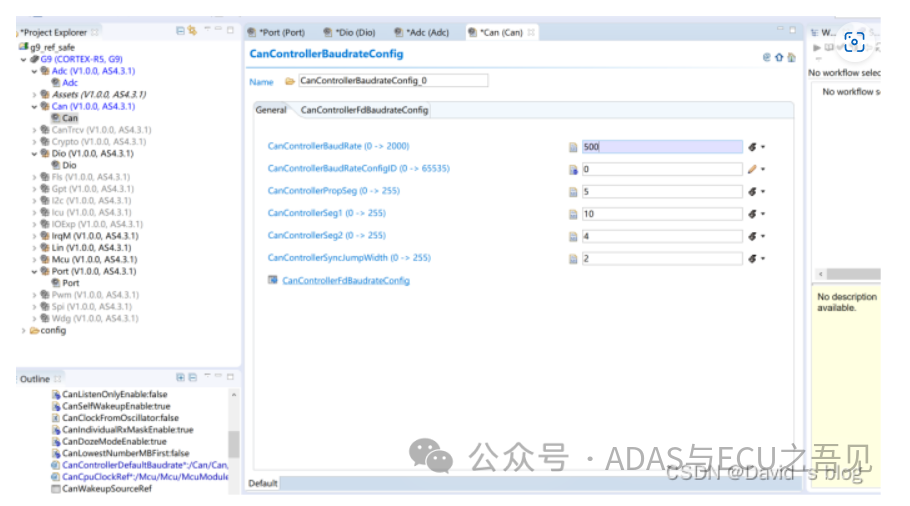
在 CanControllerBaudrateConfig 选项卡中配置CAN的波特率和采样点等。 CanControllerBaudRate:直接填写期望的波特率,在驱动中会自动进行分频计算 CanControllerBaudRateConfigID:ID从0开始递增 CanControllerPropSeg:广播同步段 CanControllerSeg1:同步缓冲段1 CanControllerSeg2:同步缓冲段2 CanControllerSyncJumpWidth:同步跳转段。 Note:采样点值的确定需根据客户的输入来确定,采样点计算方法: (1+CanControllerPropSeg+CanControllerSeg1)/(1+CanControllerPropSeg+CanControllerSeg1+CanControllerSeg2)*100%=采样点 在计算采样点参数时要注意这四个参数的关系,具体请参考百度或者J1939定义,否则EB不能生成代码。
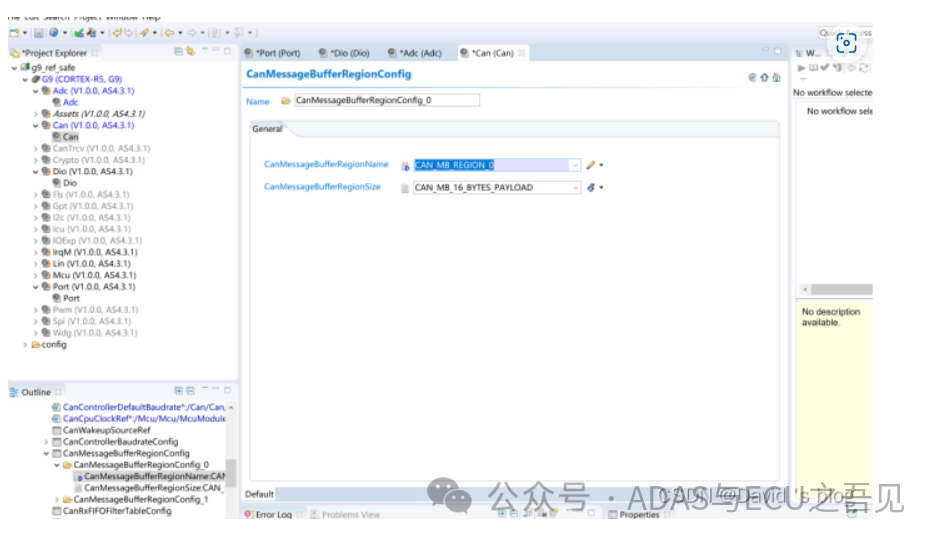
CanMessageBufferRegionName:选择CAN_MB_REGION_0/CAN_MB_REGION_1,每个region有256byte CanMessageBufferRegionSize:选择CAN_MB_8_BYTES_PAYLOAD/CAN_MB_16_BYTES_PAYLOAD/CAN_MB_32_BYTES_PAYLOAD/CAN_MB_64_BYTES_PAYLOAD,每个region大小512byte,选择CAN_MB_8_BYTES_PAYLOAD一共可以接收512/(8+8)=32帧报文。如果配置成CAN_MB_32_BYTES_PAYLOAD一共可以接收512/(32+8)=12
4.2 CAN-CanHardwareObject
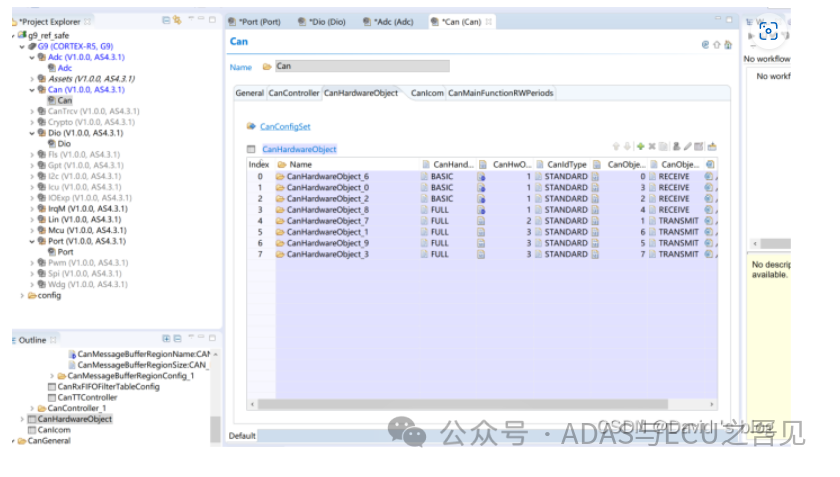
在CanHardwareObject对CAN信号进行配置,该处配置需和DaVinci cfg的CanHardwareObject保持一致,否则协议栈处理会出现信号错位的问题。此处先讲解如何配置,然后再详细讲解如何和DaVinci cfg里的保持一致。
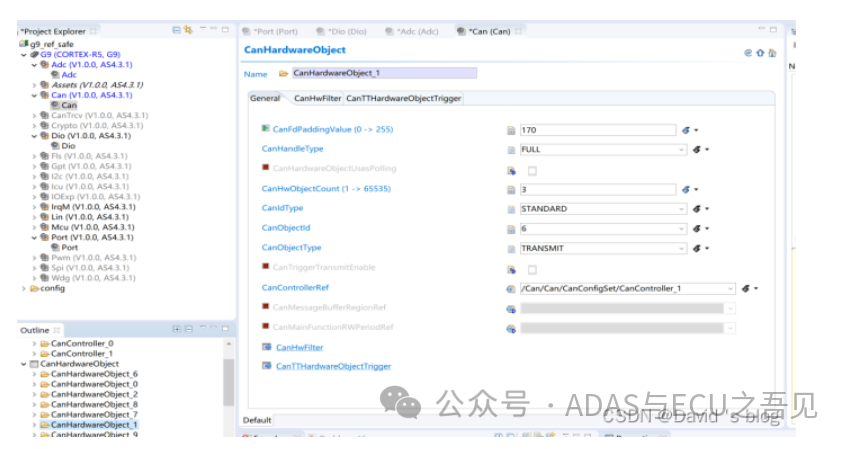
此处以一个Tx信号为例: CanHandleType:BASIC/FULL CanHwObjectCount:配置成Tx并选择BASIC,配置决定该HTH可以使用几个MailBoxs,此处配置为32,第一个Region全部用作了发送 CanIdType:STANDARD/EXTENDED/MIXED CanObjectId:需要和DaVinciCFG里面的保持一致 CanObjectType:TRANSMIT/RECEIVE CanControllerRef:该信号属于哪路Cantroller就选哪路 CanMessageBufferRegionRef:选择使用哪一个BufferRegion,一定要注意每个Region最多配置32个8Byte的报文
5.SPI
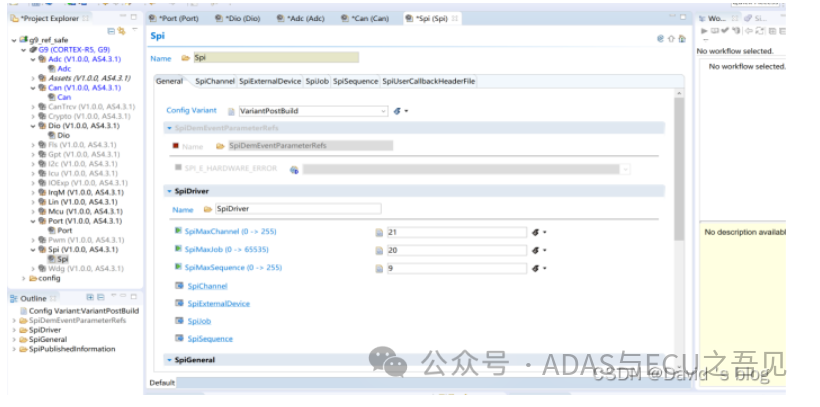
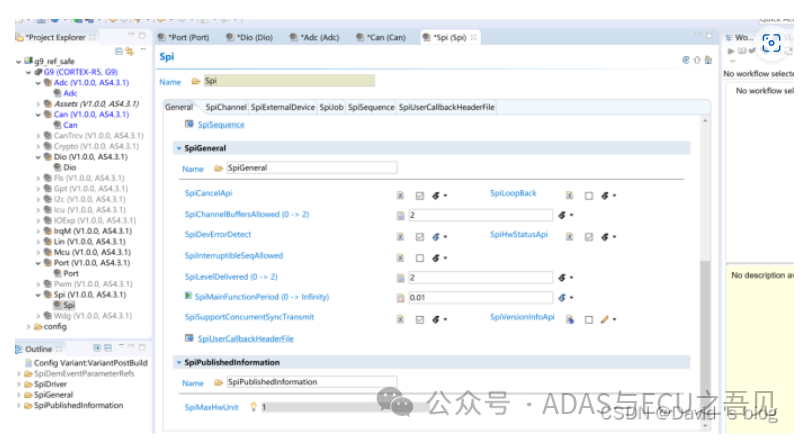
SpiMaxChannel:与SpiChannel选项卡配置的Channel值保持一致 SpiMaxJob:与SpiJob选项卡配置的Jobs值保持一致 SpiMaxSequence:与SpiSequence选项卡配置的Sequence值保持一致 SpiChannelBuffersAllowed:0:1B,1:EB,2:IB&EB SpiLevelDelivered:0:1B , 1: EB , 2: IB&EB
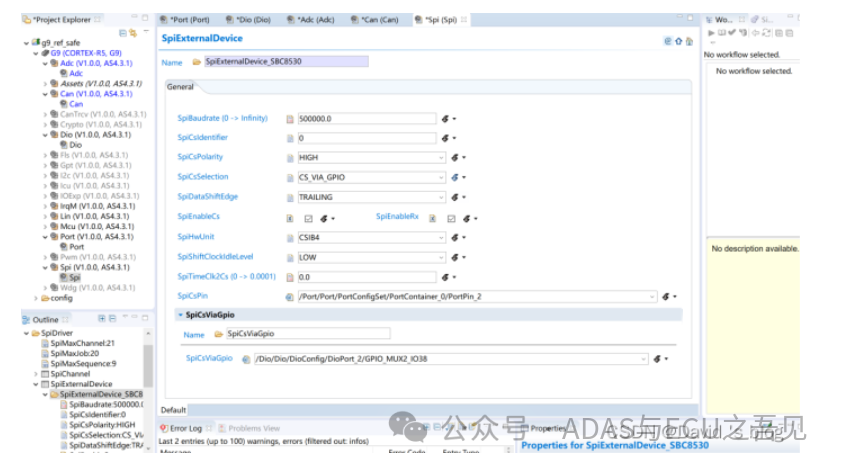
SpiCsSelection:CS_VIA_PERIPHERAL_ENGINE/CS_VIA_GPIO选择SPI_SS或者GPIO作为CS,选择CS_VIA_PERIPHERAL_ENGINE在SpiCsPin处选择Port的配置,选择CS_VIA_GPIO在SpiCsViaGpio处选择Dio的配置 SpiHwUnit:CSIB1-CSIB8对应SPI0-SPI7
6.MCU
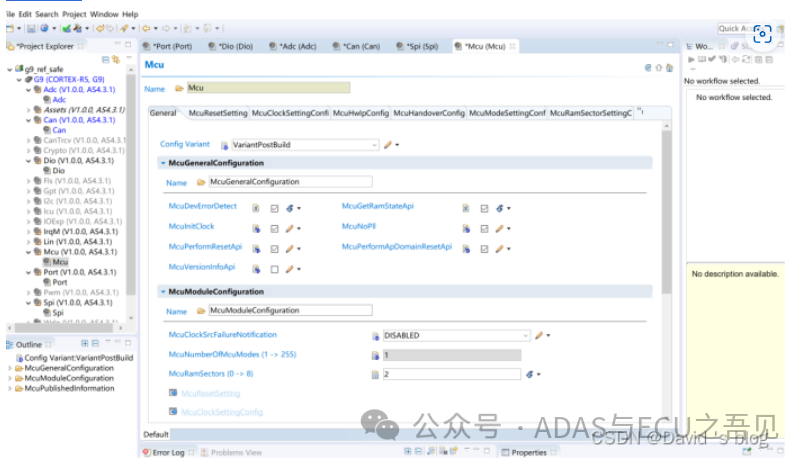
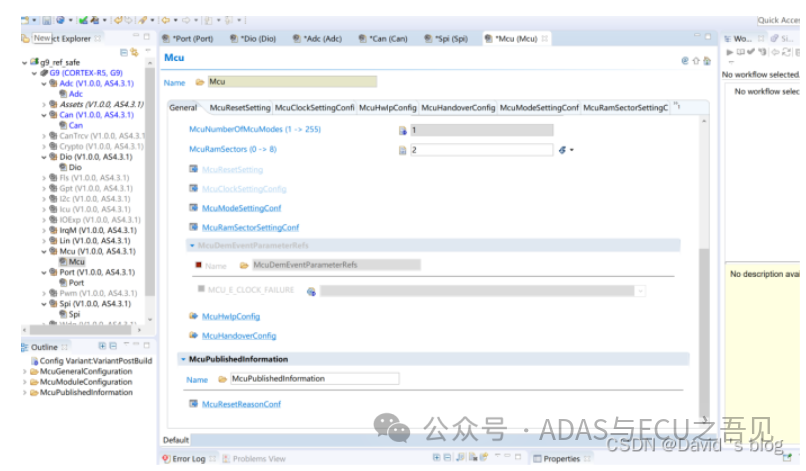
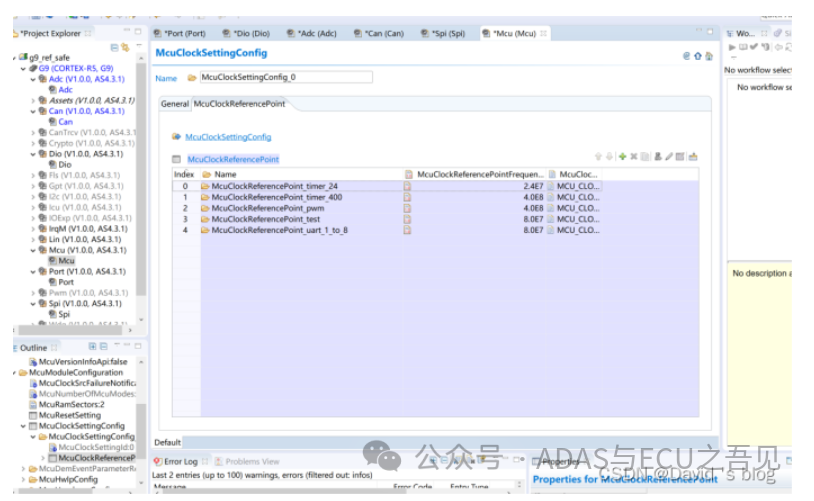
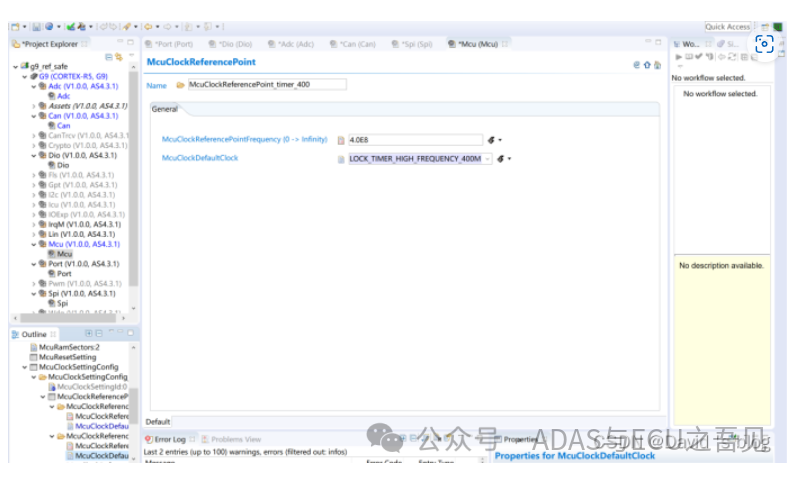
McuClockReferencePointFrequency:期望的Clock频率和McuClockDefaultClock保持一致 McuClockDefaultClock:选项有MCU_CLOCK_UART_80M/MCU_CLOCK_TIMER_HIGH_FREQUENCY_400M/MCU_CLOCK_TIMER_LOW_FREQUENCY_24M/MCU_CLOCK_12C_133_3M/MCU_CLOCK_CANFD_80M/MCU_CLOCK_PWM_400M/MCU_CLOCK_PWM_EXT
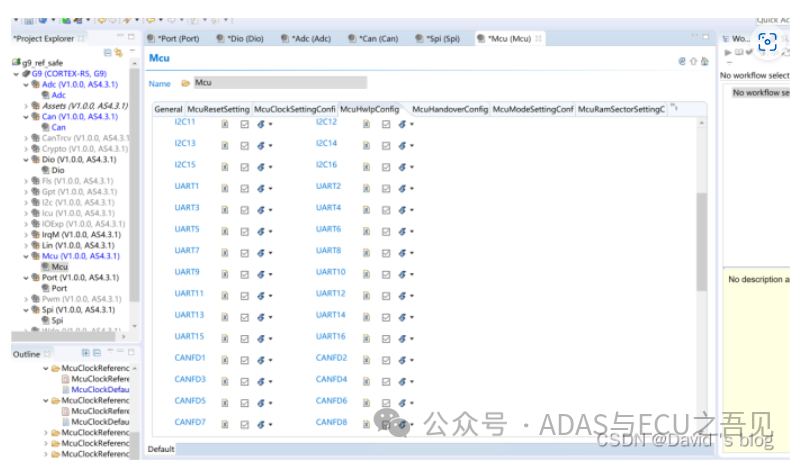
我们使用了哪些外设模块就需要在此处Enable它,否则会导致该模块工作不正常或者初始化异常。
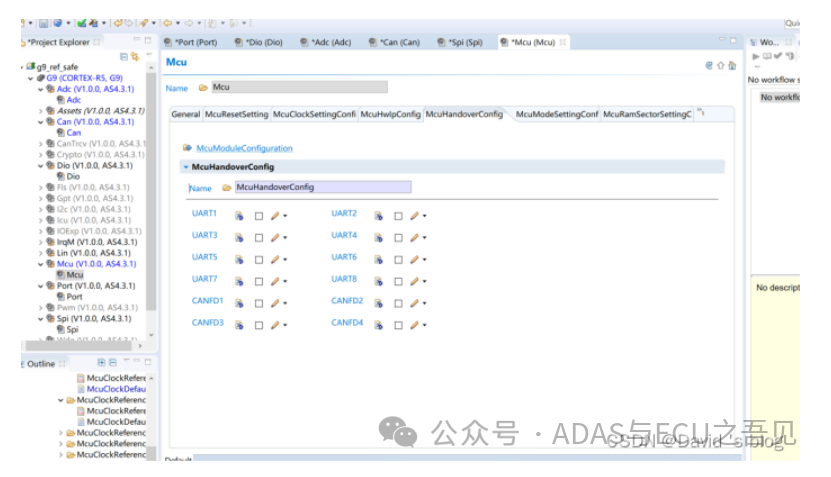
如果勾选了外设,则该外设只能由SECURE Doamin访问和使用,SAFETY Domain失去该模块的使用权限。
配置Mcu_InitRamSection的大小和写入值。(该截图里的值和[公司]的配置是一样的)。
7.Gpt
在[芯片XX] SOC 处理器中GPT模块配置的时钟是可以给其他模块使用的,例如在现有的项目开发中,Gpt有用作Os Timer, System timer ,和电源芯片定时喂狗中断等。
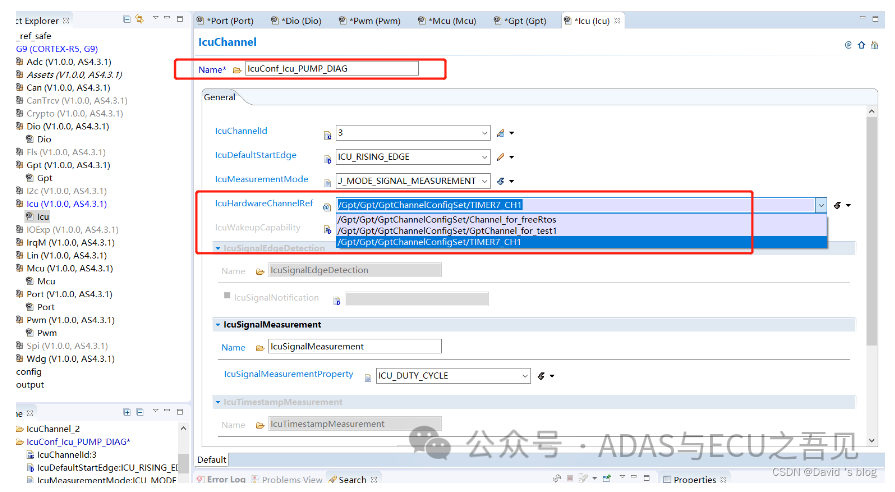
对于ICU模块来说只能使用GPT的配置作为时钟源。
[芯片XX]一共有8个Timer, 每个Timer有6个Channel,这6个Channel共享一个Timer时钟源和分频,换句话说,在APP中同一个Timer中最后生效的时钟源和分频是被最后一个初始化的Channel决定的。
6个Channel分别是:GPT_HW_TIMER_G0/GPT_HW_TIMER_G1/GPT_HW_LOCAL_A/GPT_HW_LOCAL_B/GPT_HW_LOCAL_C/GPT_HW_LOCAL_D, A/B/C/D共享一个中断号,G0/1共享一个中断号。支持使用同一个Timer的不能Channel,即使中断号共享[芯片XX]会自动识别到底是哪一个Chnnale触发的中断,进而去调用你所配置的Notification.
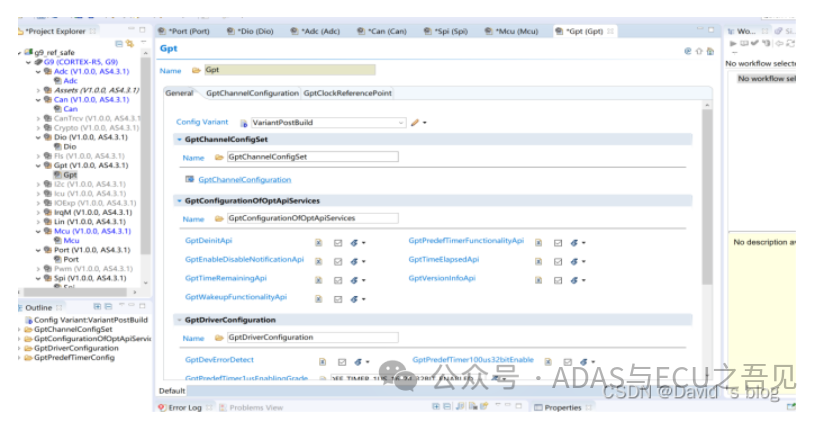
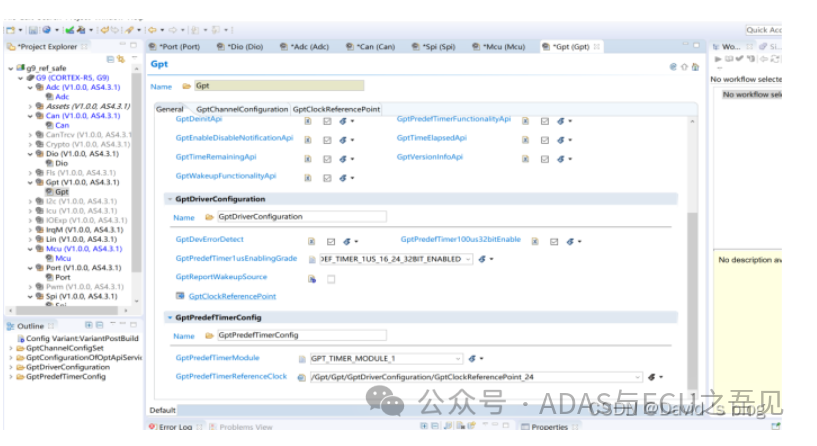
Gpt基础配置,选择是否Enable某些功能和函数。
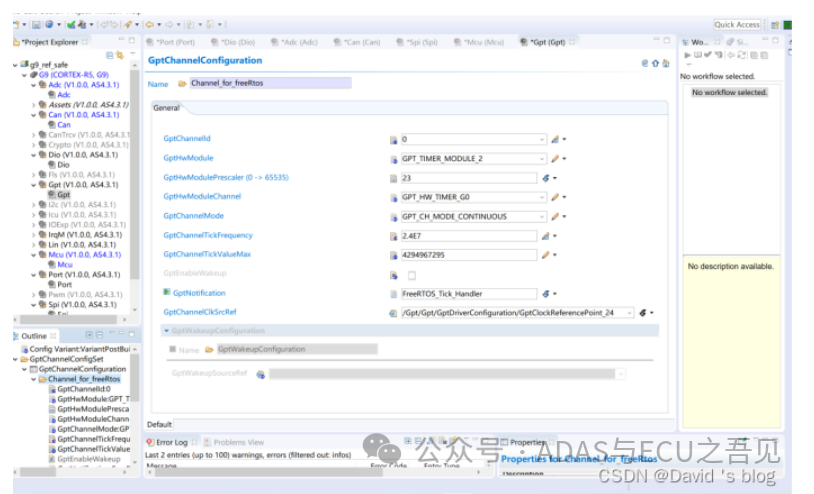
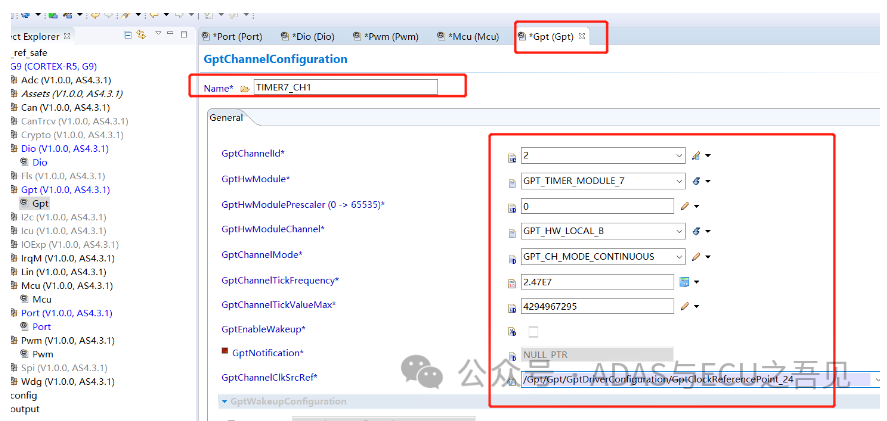
GptHwModule:[芯片XX]一共有8个Timer,每个Timer有6个Channel,这6个Channel 共享一个Timer时钟源和分频,换句话说,在APP中同一个Timer中最后生效的时钟源和分频是被最后一个初始化的Channel决定的,更详细的介绍请参考[芯片XX]官方文档。 GptHwModuleChannel:GPT_HW_TIMER_G0…GPT_HW_LOCAL_D GptChannelMode:Channel模式GPT_CH_MODE_CONTINUOUS/GPT_CH_MODE_ONESHOT Note:只有Local A/B/C/D可以配置成One shot模式 GptChannelTickFrequency:配置期望的频率,和GptChannelClkSrcRef保持一致 GptChannelTickValueMax:配置该GPT channel 最大的Ticks值产生中断或者其他 GptChannelClkSrcRef:选择GPT的时钟源
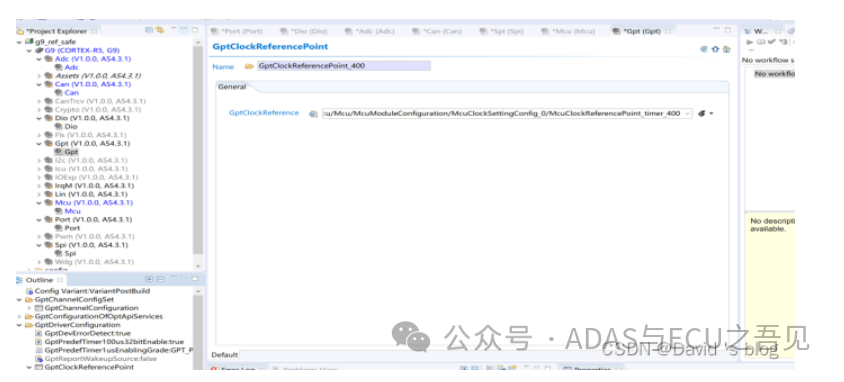
GptClockReference: 选择GPT可以选择配置的时钟源,只能选择已经在MCU模块配置好的时钟。
8.ICU
对于ICU模块来说只能使用GPT的配置作为时钟源
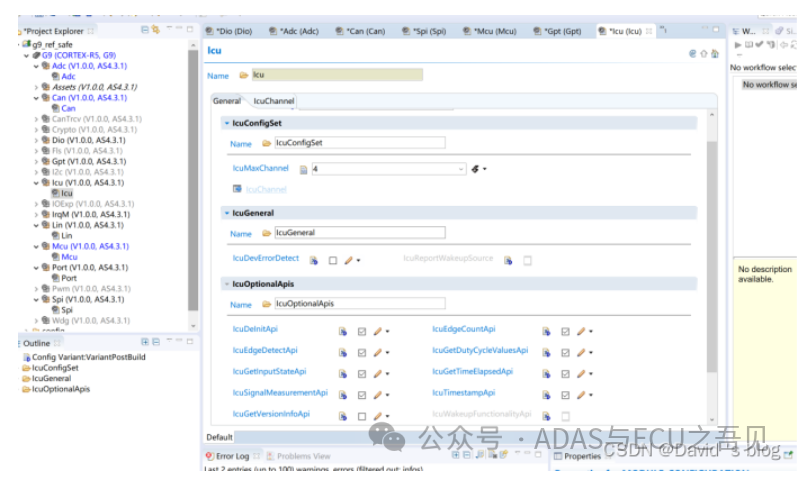
ICU基础配置,选择是否Enable某些功能和函数.
9.PWM
[芯片XX] 一共有8个PWM模块,每个pwm模块有四个子Channel,分别是A/B/C/D,四个子Channel共享同一个溢出值,所以子Channel的周期都一样的,占空比可以单独控制。更详细的可以参考官方文档。
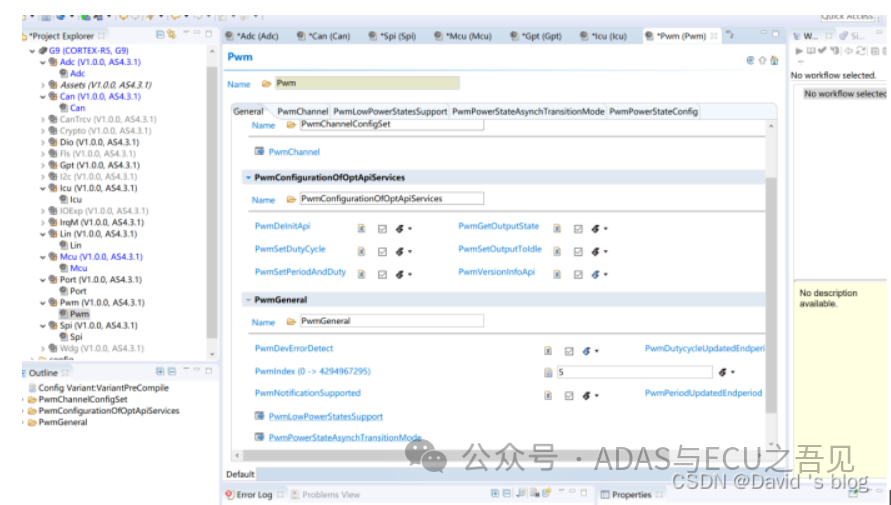
PWM基础配置,选择是否Enable某些功能和函数
PwmIndex:暂时用不到
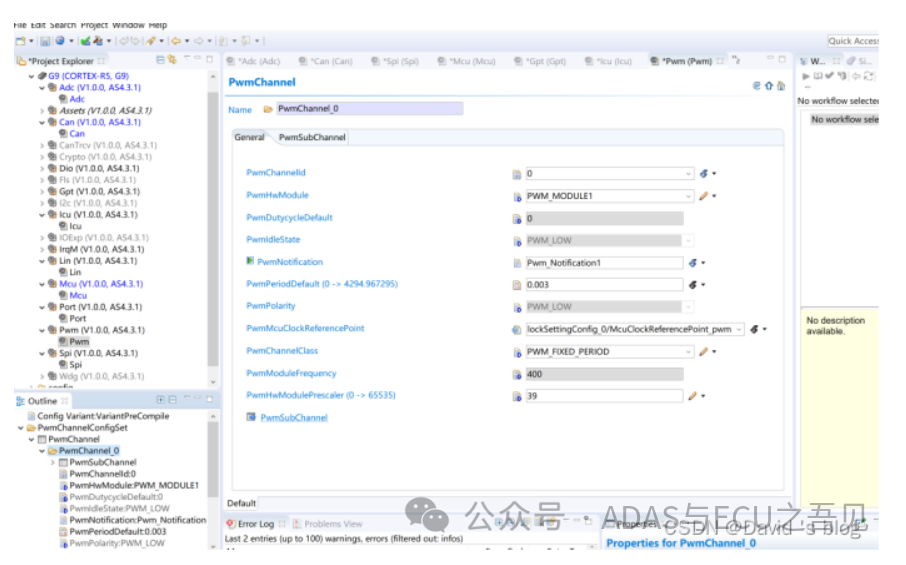
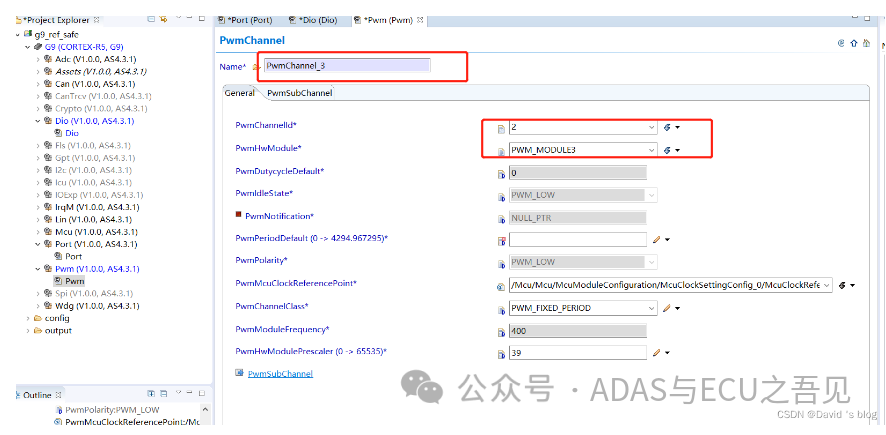
PwmHwModule:PWM_MODULE1/PWM_MODULE2/…/PWM_MODULE8 PwmPeriodDefault:设置PWM默认周期,我们通常在这里配置为0,如果配置成其他值且默认占空比也有配置,则初始化之后会立即输出PWM波 PwmMcuClockReferencePoint:Pwm的时钟源选择,只能选择在Mcu模块中已存在的配置,目前只能选择400MHz PwmModuleFrequency:不可修改 PwmHwModulePrescaler:Pwm的分频系数 400MHz/(PwmHwModulePrescaler+1)=期望频率
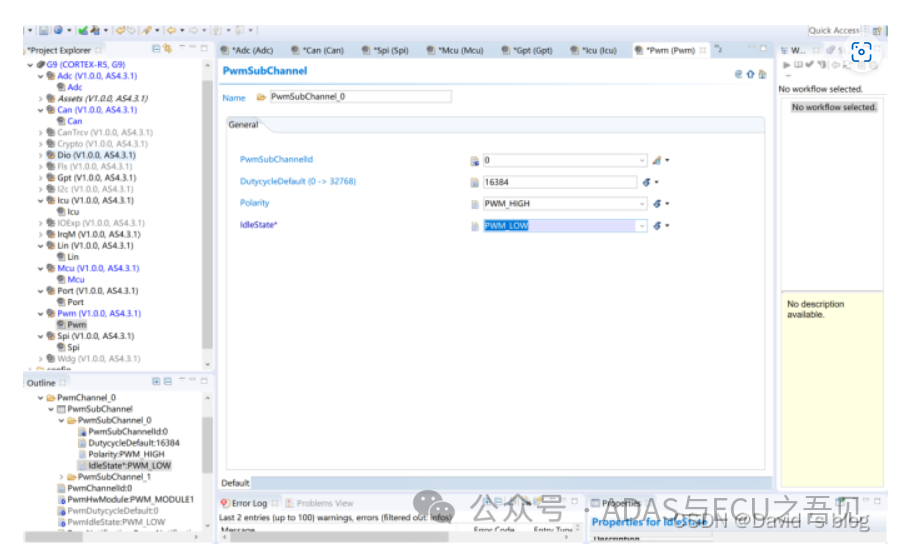
PwmSubChannelId: 子ChannelID 0/1/2/3
DutycycleDefault: 默认占空比,通常配置为0x0
Polarity: Pwm的极性,根据项目需求配置
IdleState: Pwm空闲状态,通常与Polarity相反。
三. 项目实践
1.说明:
项目实践中,MCAL需要配置两个新增功能,pwm和icu输入捕获。
功能描述:增加LSS8_EN(E12) / DI_AC_Wake(J4)PWM通道
(1)配置一个pin脚,让其输出pwm波形
(2)配置一个pin脚,让其捕获一个pwm波形
查看PinMap表格:

如图excel-PinMap表格描述了单片机中的两个引脚功能:
第一个:CPIO_C10引脚,配置成MIUX6的功能PWM3_CH2,Output模式的引脚,要输出信号,【功能描述】里的内容可以配置引脚名称时用。
第二个:GPIO_H3引脚,输入信号,使用的功能是MUX3,即TIM7_CH1,做输入捕获的功能。
3.配置第一个功能:PWM输出
(1)配置PORT
找到GPIO_C10 ,配置名称为DO_LSS8_Driver (截图示例为新建一个port)
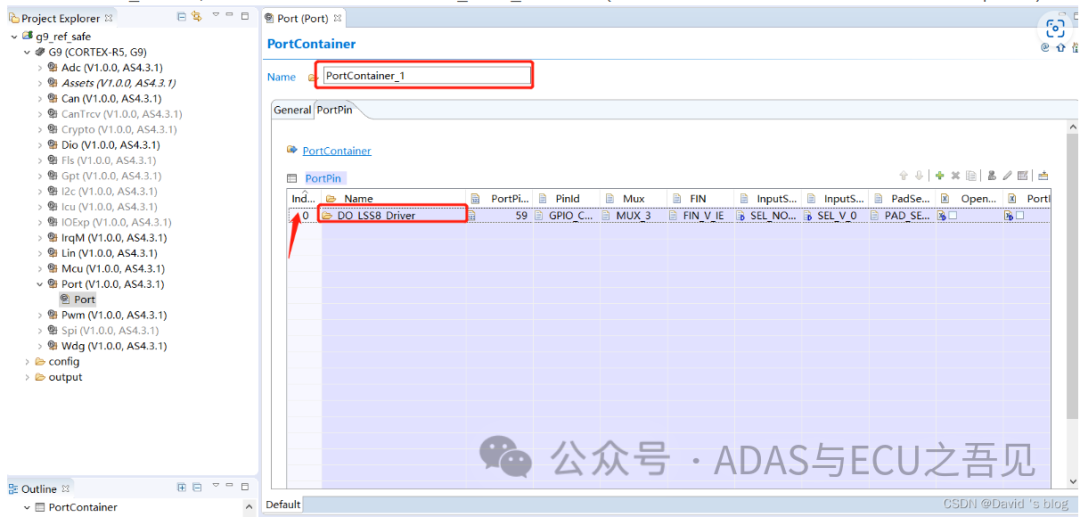
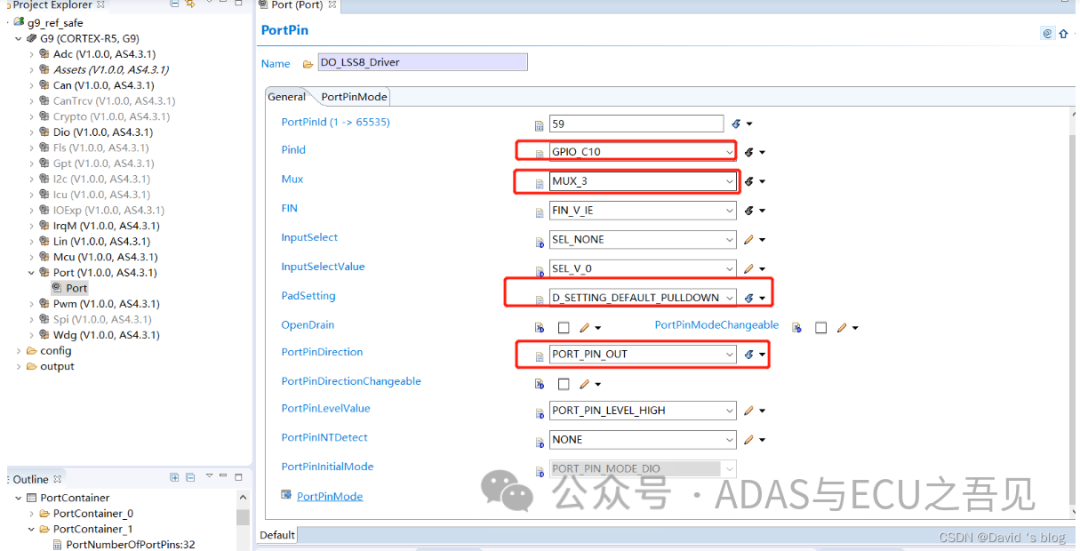
根据【PinMap】文档中介绍的pin脚功能:配置。
(2)配置DIO
因为这个引脚十一输出的引脚 所以需要配置DIO (相当于GPIO 输出高电平或者低电平)
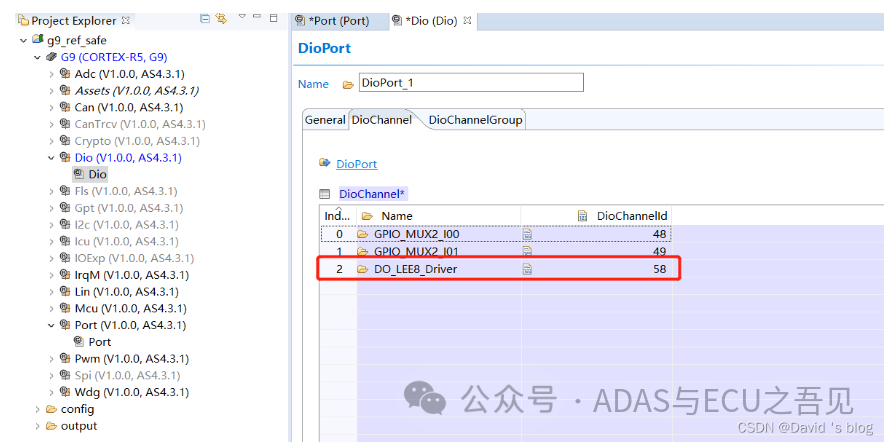 image-20240107212653255
image-20240107212653255
根据【PinMap】文档 ,查看MUX_0 = GPIO.IO58 ,配置IO58。
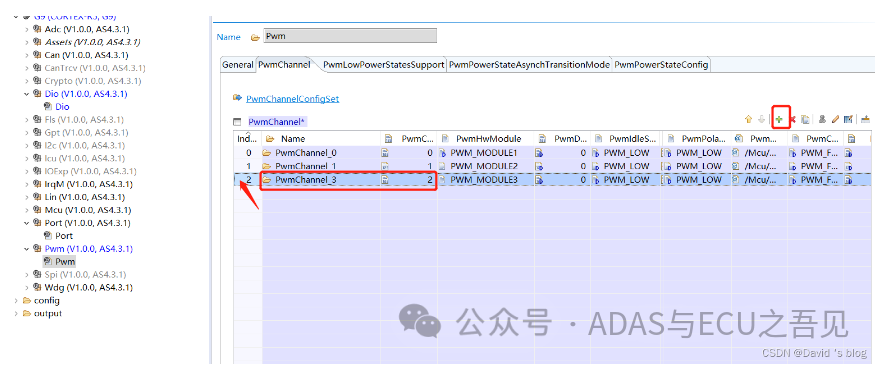
(3)配置PWM
引脚输出高电平的波形配置成PWM波形(有占空比 周期等参数的波形)
先配置模块,该芯片有8个PWM模块,每个模块有4个channel.
新增一个pwm模块(即第三个pwm模块) ,命名为PWMChannel_3 ,配置相关参数。
再配置子通道channel:
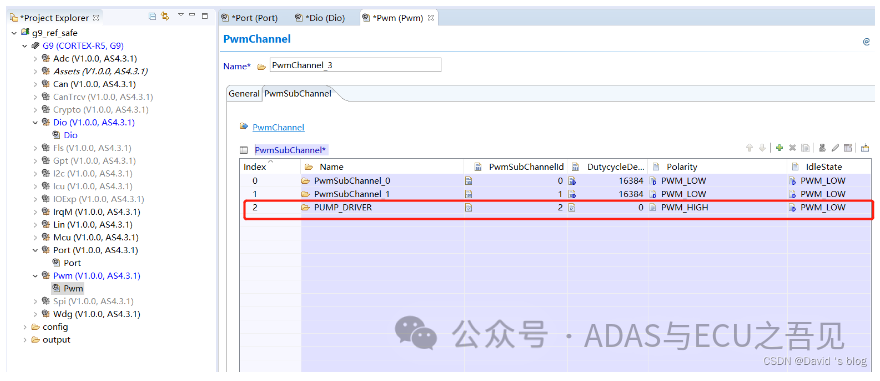
如上,完成【PinMap】文档中的PWM3CH2的配置。
(4)配置MCU
添加PWM3的使能
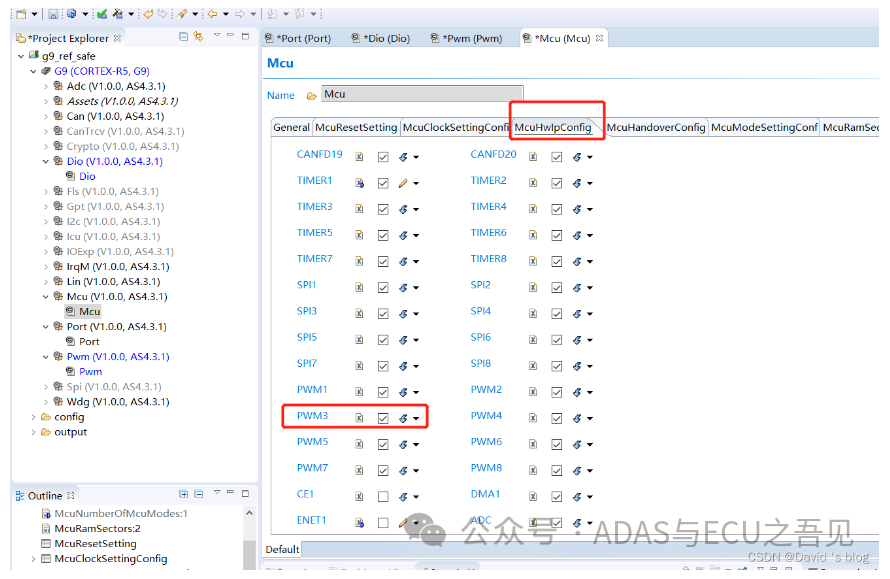
如上,完成对引脚GPIO_C10的配置。
4.配置第二个功能:ICU输入捕获
(1)配置PORT
如【PinMap】文档,找到GPIO_H3 ,配置如下:
(2)配置DIO
(3)配置GPT

需要用到时钟驱动(【PinMap文档中的MUX功能】) MUC3 = TIM7_CH1
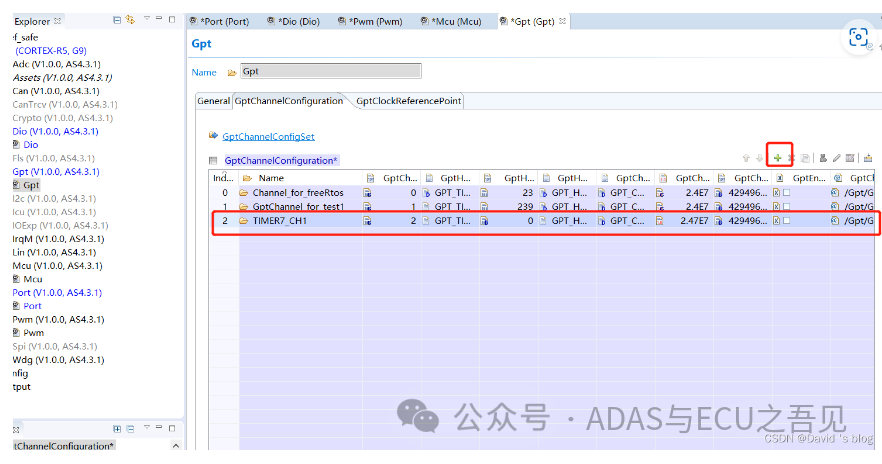
【+】新增 ,配置如下:
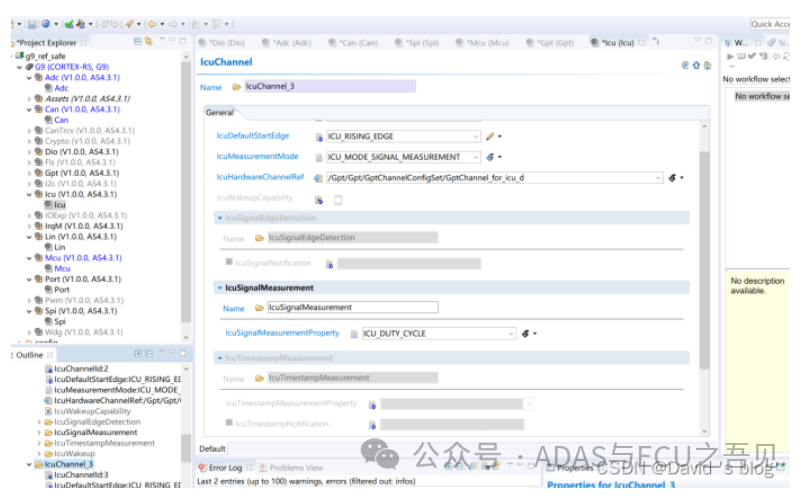
(4)配置ICU
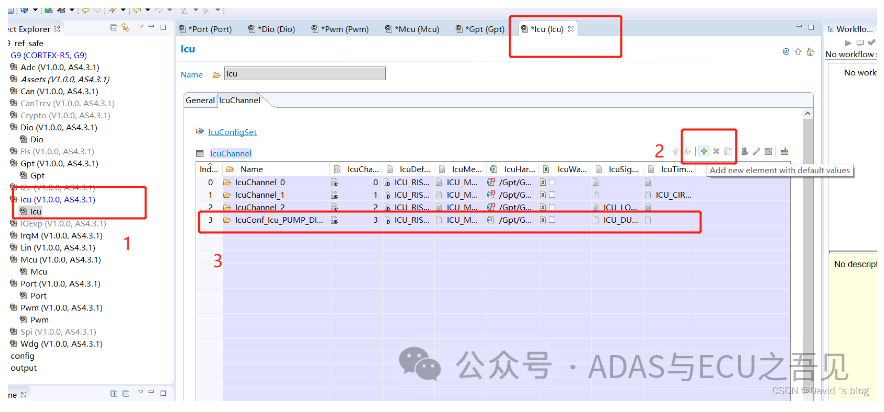
配置完成,生成代码即可。生成的代码是MCAL动态配置文件。
项目中,MCAL静态库和动态配置文件通常在不同路径下:
SDK包:BSWShareUtilesG9_SDK: 工程件:BSWShareUtilesMicroSarStatic_G9:BSW层除MCAL外的其他模块代码:BsmWCanIFDem等 DavinCi配置生成代码:CustomerConfigSourceMicroSarConfig:bsw层除mcal外的其他模块的PBCfg.c和LCfg.c(例如Ea_Cfg.cOS_xxx_Cfg.c等等) MCAL静态库:BSWShareUtilesMCALStatic_G9:adc.hadc.c...MCAL层的驱动文件 MCAL动态配置文件:CustomerConfigSourceMcalConfig:Adc_PBCfg.cPort_Cfg.cPwm_Cfg.
审核编辑:刘清
-
微控制器
+关注
关注
48文章
7546浏览量
151325 -
存储器
+关注
关注
38文章
7484浏览量
163769 -
AUTOSAR
+关注
关注
10文章
360浏览量
21557 -
ADC采样
+关注
关注
0文章
134浏览量
12840 -
BSW
+关注
关注
0文章
15浏览量
3508
原文标题:精华总结:一网打尽AUTOSAR MCAL模块
文章出处:【微信号:智能汽车电子与软件,微信公众号:智能汽车电子与软件】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
AUTOSAR MCAL驱动程序与演示程序中的Libraries中的驱动程序有什么不同之处?
【下载有奖】Fluke红外热像资源中心,红外热像解读,一网打尽!
AUTOSAR MCAL MCU模块的相关资料分享
基于RT-Thread内核的AUTOSAR在n32g上的实现方案
S32K3 MCAL支持哪些版本的Autosar?
AUTOSAR MCAL解析:MCU

AUTOSAR MCAL软件的开发
AUTOSAR MCAL-基于Infineon TC3xx芯片的ADC模块
一网打尽总结 Mysql的所有Buffer

一网打尽十二款高端智能手表,兼顾功能与价格,总有一款适合你!






 工商网监
工商网监
评论