 STM32驱动安信可Rd-03D,实现不同角度点亮不同LED灯
STM32驱动安信可Rd-03D,实现不同角度点亮不同LED灯
安信可雷达模组Rd-03D已经上市,该雷达采用一发两收的天线,可以实现目标跟踪,实现对区域内目标测距、测角和测速。可用于智能控制空调、风扇等家电运行、智能马桶、感应灯、台灯、镜子灯、智能调节屏幕亮度等各行业场景中。
产品介绍:多人轨迹怎么识别?这块雷达模组能做到!
本应用示例使用STM32解析Rd-03D的串口数据,检测人体距离雷达的角度,根据不同角度点亮不同的灯珠:-60度到-20度点亮 LED1,-20度到20度点亮LED2,20度到60度点亮LED3。
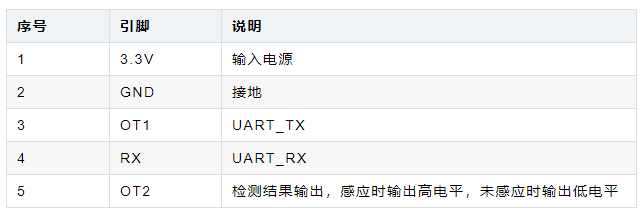
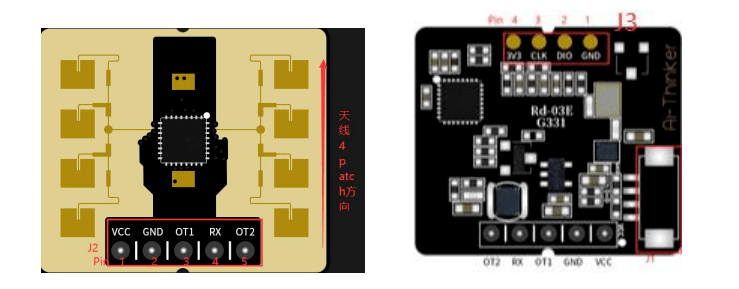
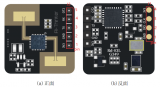
一、Rd-03D引脚说明
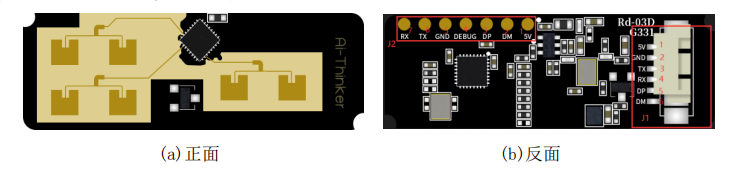
J1引脚说明:

J2引脚说明:

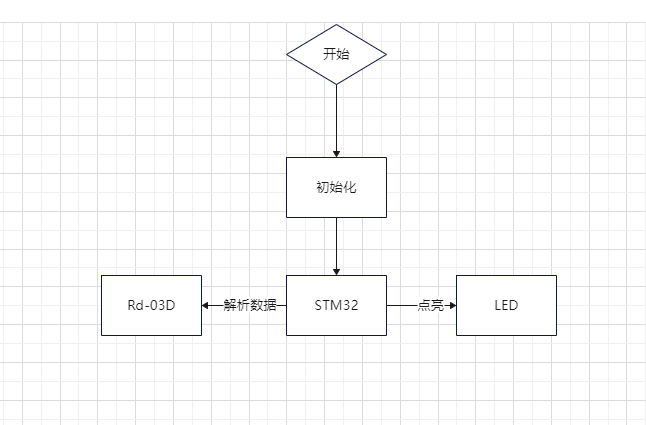
二、软件设计框架
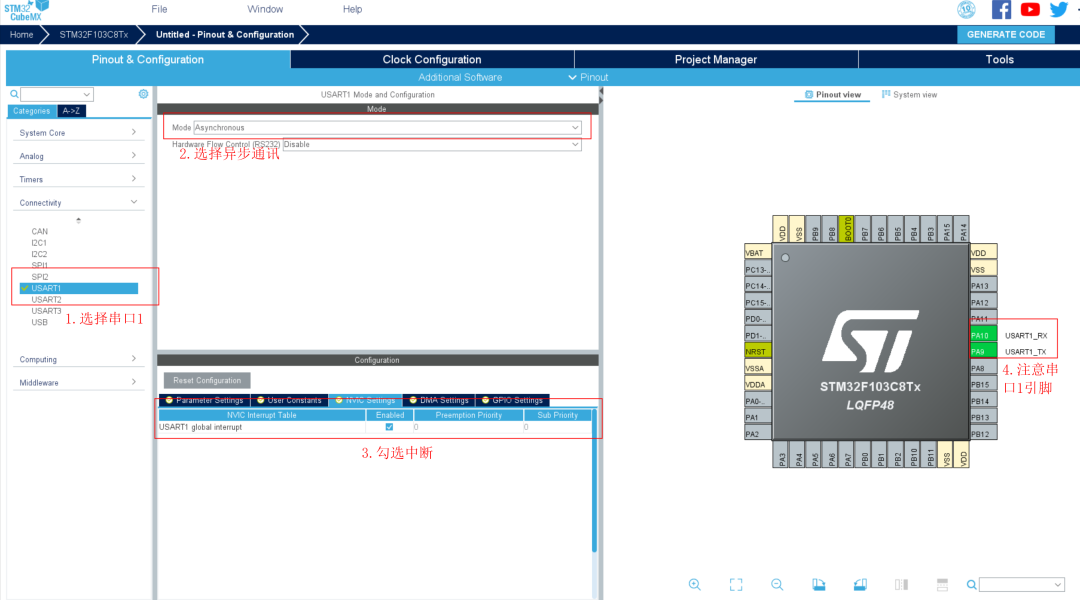
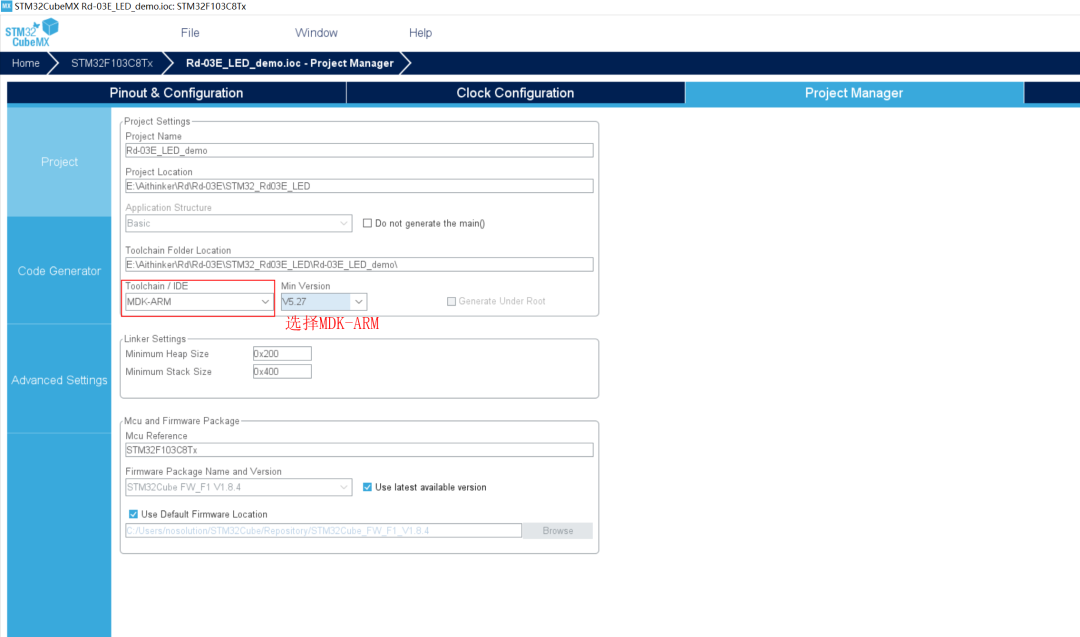
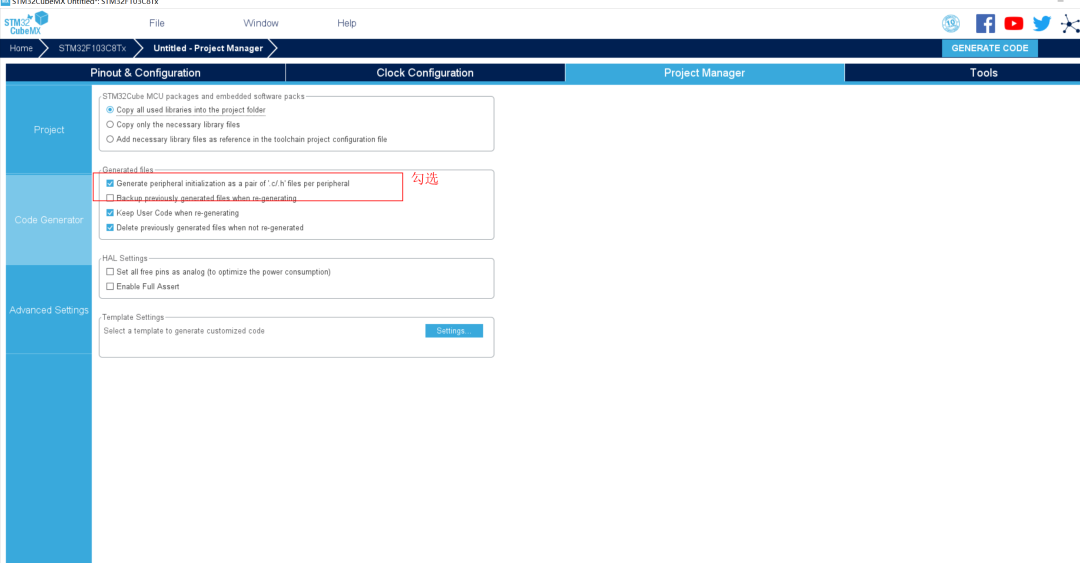
三、STM32F103C8T6使用CubeMX搭配HAL库配置
打开CubeMX,选择STM32F103C8T6。
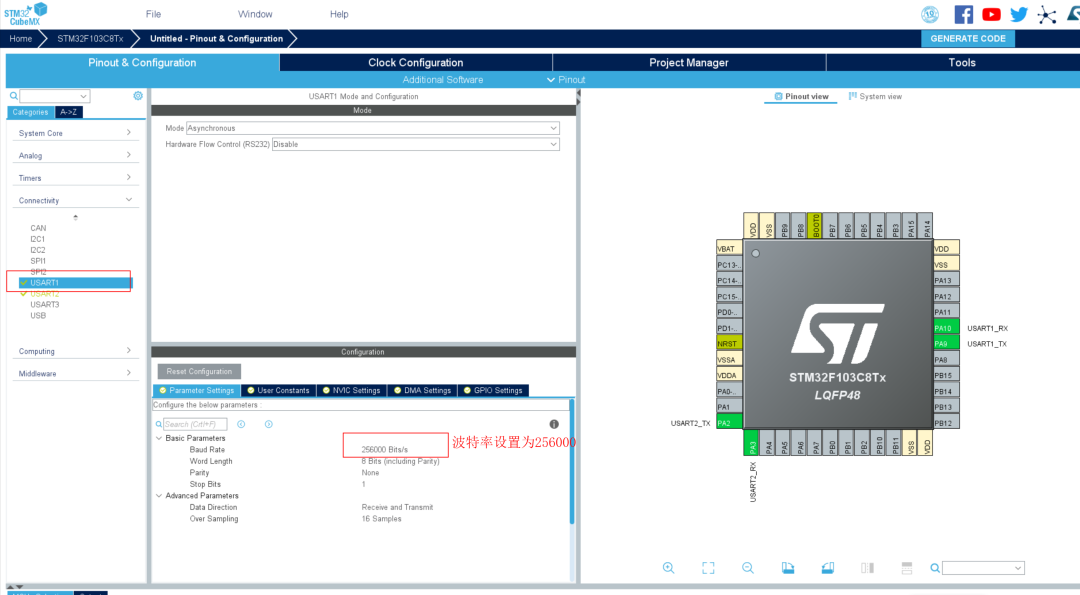
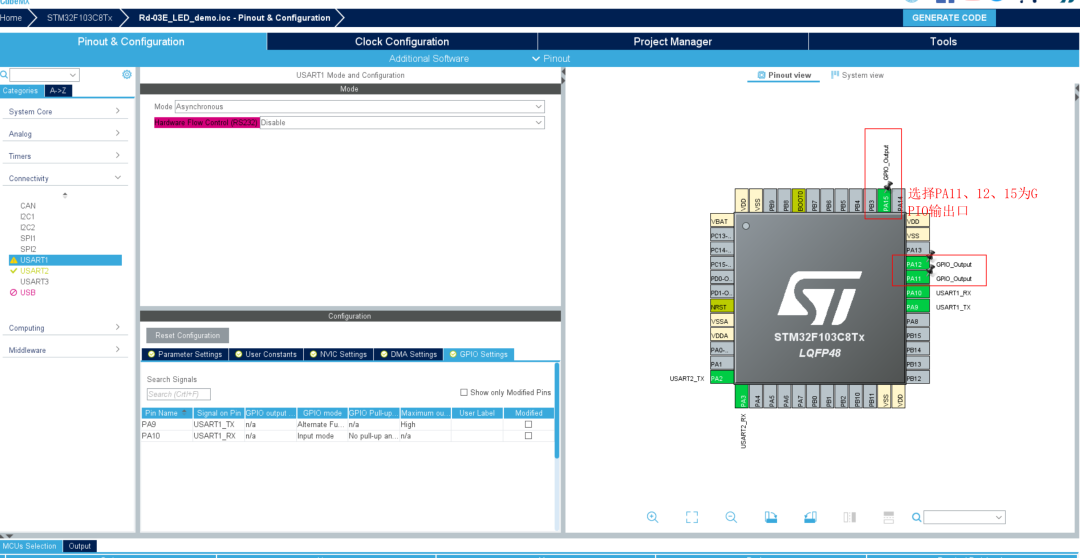
选择两个串口,分别是串口1和串口2,PA9为USART1_TX,PA10为USART1_RX,PA2为USART2_TX,PA3为USART_RX。
选择异步通讯,勾选中断,注意:串口1的波特率为256000,串口2波特率为115200。
设置GPIO口
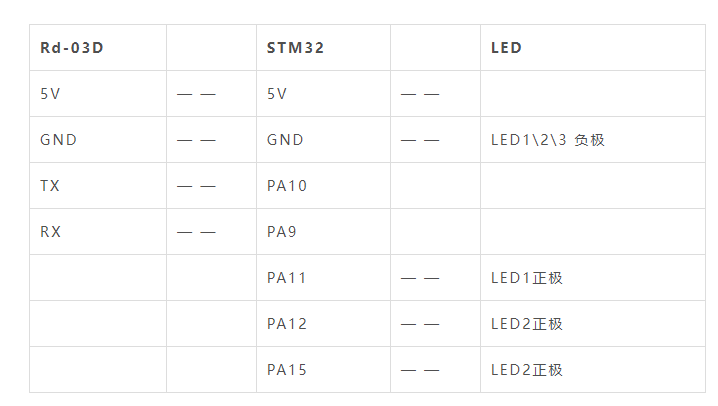
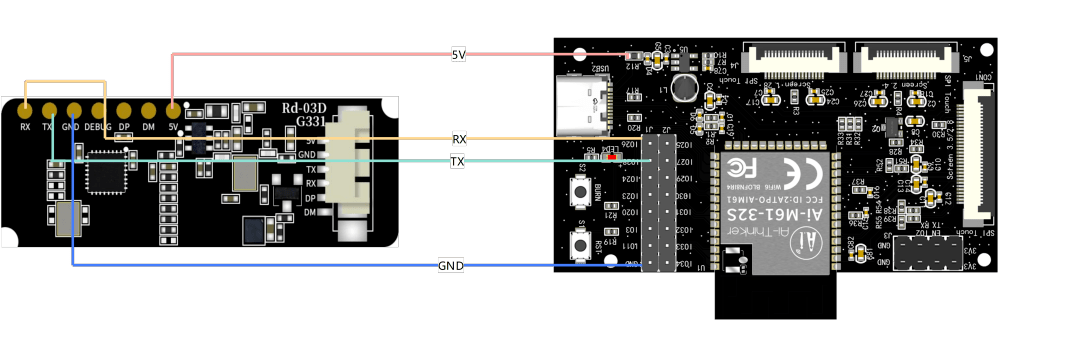
四、STM32与Rd-03D和LED灯的接线
五、串口数据处理
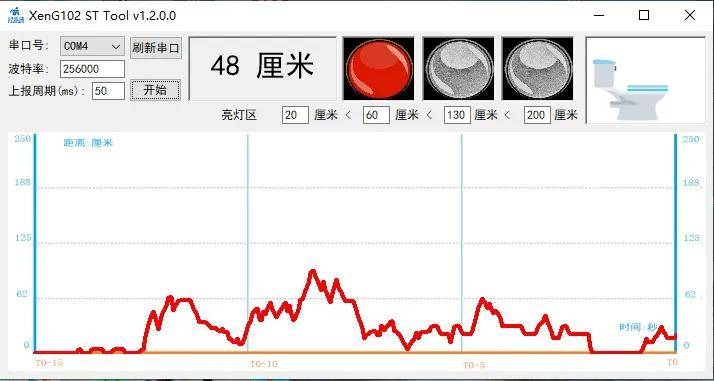
Rd-03D的串口数据
Rd-03D模组通过串口(TTL电平)与外界通信,雷达串口默认波特率为256000,1停止位,无奇偶校验位。雷达输出检测到的目标信息,包括在区域中的x坐标,y坐标,以及目标的速度值(小端模式)。
上报是数据帧格式:
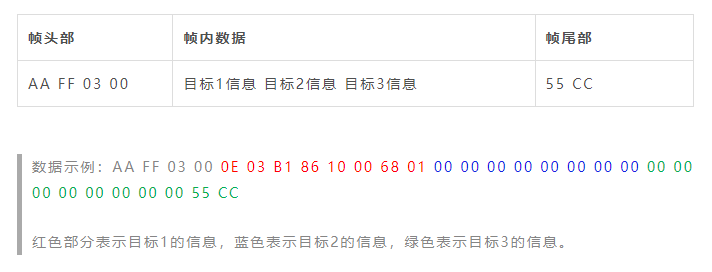
本示例展示解析单目标模式下对角度信息进行解析,所以需对单个目标内的数据进行解析(即目标1),其中单个目标具体包含内容如下:

六、STM32数据处理
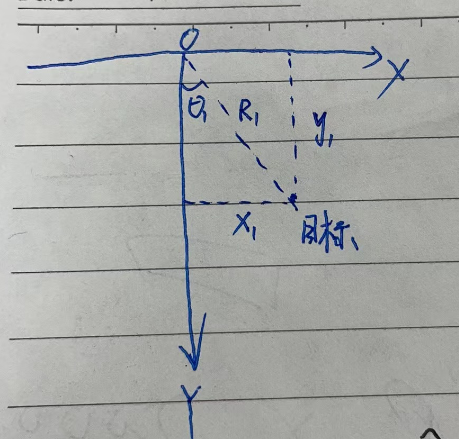
角度计算过程运用到了三角函数知识,求对边比邻边(即x/y)tan(θ)角度,如图:
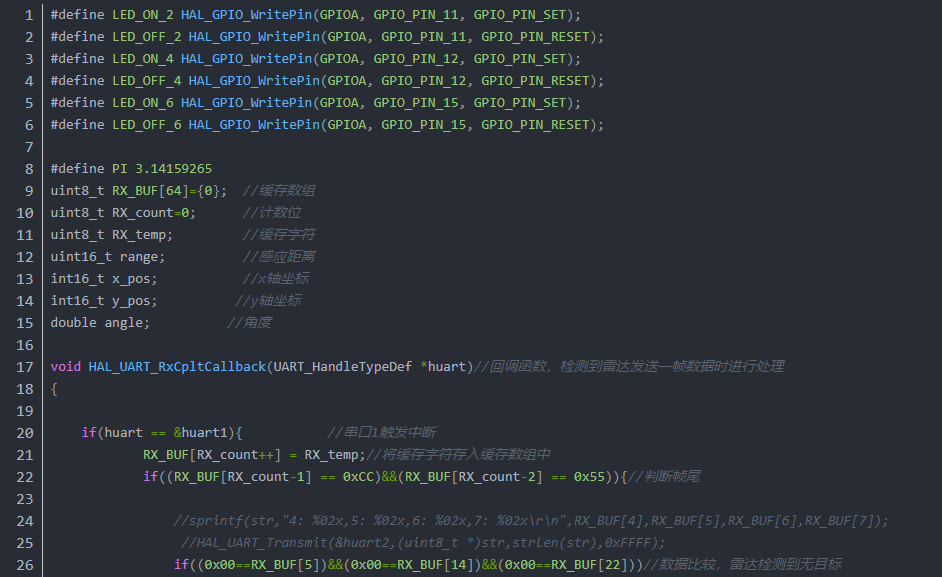
具体实现代码(部分截图,详情请点击原文查看原贴)
七、源码地址
源码地址:
https://e.coding.net/axk/stm32_rd-03/STM32_Rd03D_LED.git
原贴地址:STM32驱动安信可RD-03D实现不同角度点亮不同LED灯https://aithinker.blog.csdn.net/article/details/133793409
审核编辑 黄宇
-
led灯
+关注
关注
22文章
1592浏览量
107956 -
STM32
+关注
关注
2270文章
10896浏览量
355769
发布评论请先 登录
相关推荐
安信可新品雷达模组Rd-03搭配STM32制作简易人体感应雷达灯教程

STM32驱动Rd-03D实现不同角度点亮不同LED灯

基于安信可Rd-03+STM32制作人体检测雷达灯


关于Rd-03D雷达模组产品概述

多人轨迹怎么识别?安信可Rd-03D雷达模组能做到!
安信可新款雷达模组Rd-03E精准测距效果
24GHz轨迹跟踪雷达模组,可检测区域内人员位置、数量
使用小安派-DSL-3.5寸开发的Rd-03D雷达检测站

AiPi-Radar-Monitor 雷达检测站(Rd-03D)
安信可雷达系列的超低功耗人体存在毫米波传感器—Rd-03L
【雷达灯控】安信可 Rd-03E+ 灯 + Ai-M61
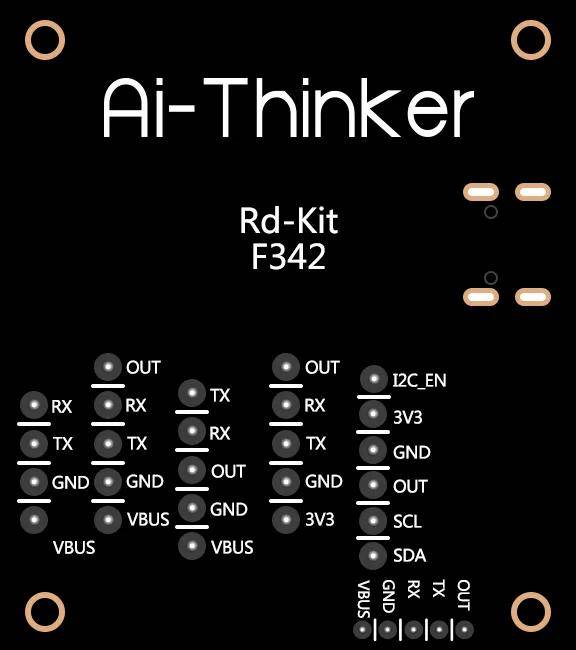
告别接线!手机一键调参,Rd-Kit雷达蓝牙底板,让雷达模组使用更简单





 工商网监
工商网监
评论