 容错can和高速can的区别
容错can和高速can的区别
容错CAN(Controller Area Network)和高速CAN是两种常见的汽车通信协议,它们在速度和可靠性方面有所不同。以下是关于容错CAN和高速CAN的详尽、详实和细致的1500字文章。
第一部分:容错CAN介绍
容错CAN是一种使用于汽车领域的通信协议,它是由Bosch公司于1986年首次推出的。容错CAN被广泛用于各种车辆系统,如发动机管理、制动系统、仪表盘和车身控制等。容错CAN主要用于向车辆各个子系统传输信息和指令,以实现车辆内部各部件的通信和协调。
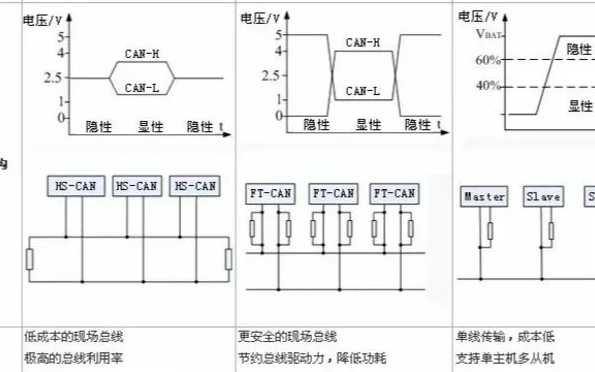
容错CAN的主要特点是其高度可靠的数据传输。它采用了差分信号线来传输数据,这种差分信号线能够在一些干扰的情况下依然保持通信的可靠性。此外,容错CAN还采用了一种错误检测和纠正机制,可以在数据传输过程中检测和更正可能出现的错误,从而提高数据的正确性和完整性。
容错CAN的通信速度较低,一般为100kbps。这是因为容错CAN主要用于传输一些非实时性的信息,如车辆状态和控制指令等,对通信速度的要求相对较低。同时,较低的通信速度还有助于减小干扰对通信造成的影响,提高通信的可靠性和稳定性。
第二部分:高速CAN介绍
高速CAN是容错CAN的一种改进版,它在通信速度和实时性方面有所提升。高速CAN增加了通信速度,一般为500kbps或更高。这使得高速CAN适用于传输一些需要较快响应的实时信息,如车辆动态数据和传感器数据等。高速CAN可以更快地传输数据,从而提高系统的响应速度和效率。
高速CAN在数据传输的可靠性方面采用了一些改进措施。它增加了一些错误检测和纠正机制,可以在数据传输过程中更好地检测和纠正错误。与容错CAN相比,高速CAN在数据传输的可靠性方面更强大,可以更好地抵抗一些干扰和噪声。
另外,高速CAN还增加了一些功能,如具有更高的带宽和具备多主控制器的能力。这使得高速CAN能够同时传输更多的数据,并支持多个ECU(Electronic Control Unit)同时对总线进行控制。
第三部分:容错CAN与高速CAN的区别
容错CAN和高速CAN在速度和可靠性方面有所不同。容错CAN传输的速率较低,一般为100kbps,而高速CAN传输的速率较高,一般为500kbps或更高。容错CAN主要用于传输一些非实时性的信息,对通信速度的要求相对较低;而高速CAN适用于传输需要较快响应的实时信息。
容错CAN和高速CAN在数据传输的可靠性方面也有所不同。容错CAN采用了差分信号线和错误检测和纠正机制,可以在一些干扰的情况下保持通信的可靠性。而高速CAN在可靠性方面更强大,增加了一些错误检测和纠正机制,可以更好地抵抗干扰和噪声。
此外,高速CAN在功能上也有一些提升。它具备更高的带宽,可以同时传输更多的数据。同时,高速CAN还具备多主控制器的能力,支持多个ECU同时对总线进行控制,提高系统的灵活性和可扩展性。
结论:
容错CAN和高速CAN是两种常见的汽车通信协议,在速度和可靠性方面有所不同。
容错CAN主要用于传输一些非实时性的信息,速率较低,一般为100kbps。它采用了差分信号线和错误检测和纠正机制,可以在一些干扰的情况下保持通信的可靠性。容错CAN的设计目标是提供高度可靠的数据传输。
高速CAN适用于传输需要较快响应的实时信息,速率较高,一般为500kbps或更高。它增加了一些错误检测和纠正机制,可以更好地抵抗干扰和噪声。高速CAN还具备更高的带宽和多主控制器的能力,支持同时传输更多的数据和多个ECU对总线的控制。
容错CAN和高速CAN在汽车通信系统中起着不同的作用,选择适合的通信协议取决于具体应用的需求。无论是容错CAN还是高速CAN,都是为了确保车辆内部各个子系统之间的信息传输和协调效果,提高整体系统的性能和可靠性。
-
通信协议
+关注
关注
28文章
869浏览量
40288 -
数据传输
+关注
关注
9文章
1862浏览量
64522 -
CAN
+关注
关注
57文章
2730浏览量
463518 -
差分信号线
+关注
关注
0文章
10浏览量
1960
发布评论请先 登录
相关推荐
高速CAN总线和低速CAN总线的特性

求助:容错CAN驱动及收发程序编写
高速CAN、容错CAN、LIN总线的区别是什么
低速CAN和高速CAN都有哪些区别呢
高速CAN总线和低速CAN总线区别分析


科普系列:低速容错CAN的容错机制介绍






 工商网监
工商网监
评论