 一文读懂:为什么碰撞检测是协作机器人的底层威廉希尔官方网站
一文读懂:为什么碰撞检测是协作机器人的底层威廉希尔官方网站

协作机器人
传统工业机器人体积庞大且安全系数低,因为作业半径内不允许有人。随着精密制造、柔性制造等动态非结构化生产需求增加,机器人与人、机器人与环境的共存对机器人设计提出了更高的要求,具备这种能力的机器人我们将其称为协作机器人。
协作机器人具有诸多优点,包括轻量化、环境友好性、智能感知、人机协作和易于编程等。在这些优点背后,有一项功能是非常重要的,那就是碰撞检测——主要作用是减少碰撞力对机器人本体的影响,避免机器人本体或者外围设备损坏,更重要的是防止机器人对人类造成损伤。
随着科学威廉希尔官方网站 的发展,用于实现协作机器人碰撞检测的方式已经有很多,包括运动学、力学、光学等。当然,这些实现方式的核心都是具备各种检测功能的元器件。
协作机器人的碰撞检测
机器人的出现并非意在完全取代人类,很多工作需要人类和机器人相互合作来完成,这便是协作机器人诞生的背景。协作机器人的设计初衷是为了与人类在工作中进行互动和协作,以提升工作效率和安全性。
在一个工作场景下,协作机器人与人类直接合作,因此安全性问题怎么强调都不为过。为了保障人机协作的安全性,业界制定了诸多相关的法规和标准,目的就是为了让协作机器人从设计之初就考虑到人机协作的安全性问题。
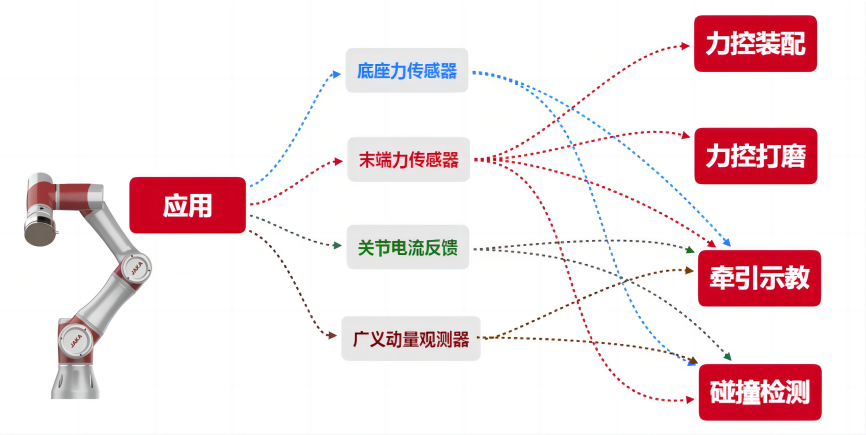
图1:碰撞检测位于协作机器人设计逻辑的底层
(图源:节卡机器人)
同时,协作机器人自身也要确保安全可靠。由于协作机器人的空间自由度非常高,且主要替代人类在复杂、危险环境中的工作,因此在磨削、装配、钻孔、搬运等工作中,也需要对可能发生的碰撞进行快速可靠的检测。
为了让协作机器人不与人类、环境发生碰撞,设计者们将碰撞检测大致分为四个环节:
01
预碰撞检测
在一个工作环境里部署协作机器人时,设计者希望这些机器人能够像人类一样熟知环境,规划自己的移动路径。为了达到这一点,设计者在协作机器人上安装具有一定计算能力的处理器和检测算法,并搭建摄像头、传感器和雷达的一种或者几种作为检测手段。如上所述,预碰撞检测是有行业标准可以遵循的,比如ISO/TS15066协作机器人设计标准中,就要求协作机器人在人接近时停止运行,人离开时立即恢复。
02
碰撞检测
这就是一个非是即否的形态,代表协作机器人是否发生了碰撞。为了不发生误触发的问题,设计者会为协作机器人设定一个阈值。这个阈值的设定是非常考究的,既要保证不能频繁触发,同时也要极度灵敏以避免碰撞。由于机器人的控制主要靠马达,因此设计者将这个阈值和马达自适应算法结合在一起,做到碰撞即停。
03
碰撞隔离
当系统确认碰撞发生之后,需要确认具体的碰撞点或者是碰撞关节。此时实施隔离目的就是让这个碰撞的部位停下来。传统机器人的碰撞隔离通过外部护栏来实现,协作机器人由于处于开放空间,因此就需要通过算法和反向加速度来实现。
04
碰撞识别
此时协作机器人已经确认发生了碰撞,相关变量已经超出了阈值。这时候机器人上的处理器需要根据传感信息判断碰撞是否为偶发碰撞,如果判定结果为是,那么协作机器人需要自我修正;如果判定为非偶发碰撞,那么此时协作机器人将停机等待人类处理。
可以说碰撞检测是协作机器人实现自我感知非常重要的主张,为协作机器人的大规模应用和进入更广泛的场景提供了可能。在不同的碰撞环节,协作机器人对于传感器的需求是不一样的。比如在预碰撞检测环节,系统的主要目的是不让碰撞发生,因此传感器的职责就是环境感知。实现的路线有很多,比如基于视觉的环境感知,基于毫米波雷达的环境感知,还有基于激光雷达的环境感知等,那么就需要配合对应的传感器和算法。
当碰撞发生之后,重要的是协作机器人要第一时间知晓碰撞点和碰撞的程度,以采取进一步的措施防止情况进一步恶化。碰撞检测传感器便是在此时发挥作用。常见的碰撞传感器主要有机械式碰撞传感器、磁力式碰撞传感器、压电式碰撞传感器、应变式碰撞传感器、压阻片式碰撞传感器和水银开关式碰撞传感器等。
我们都知道,协作机器人在工作时,机械臂会被施加来自很多方向的力矩,用以让机械臂运动起来进行工作。如下图所示,搭载碰撞传感器的保护系统在检测到碰撞发生之后,会施加合力矩、转矩以及轴向负载的反作用力,协作机器人会立刻停止工作。
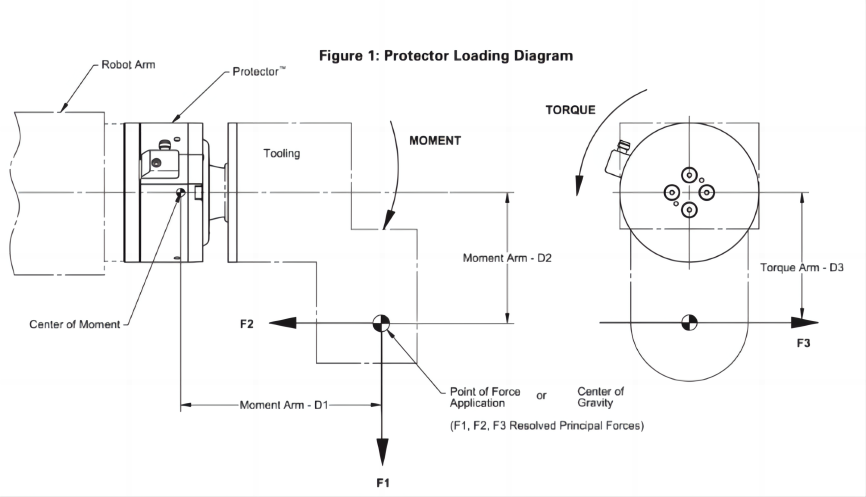
图2:机械臂保护系统框图
(图源:ATI)
如果你已经迫不及待想要实现一款具有高度安全性的协作机器人,下面这两款贸泽电子在售的传感器都是很不错的选择。
具有高分辨率阈值的
三轴数字加速度计
上文中提到,目前用于协作机器人的碰撞检测传感器已经非常多了,在此我们展开说一下三轴数字加速度计。
三轴数字加速度计可以用于测量物体在三个坐标轴上的加速度,当碰撞发生时,以此计算加速度计值之间的差值,当差值累计超过阈值时,则确认系统发生了碰撞。三轴数字加速度计是目前行业里用以确认碰撞发生的简单方式之一。
下面我们就为大家介绍一款贸泽电子在售的,可用于协作机器人碰撞检测的三轴数字加速度计,来自制造商ROHM Semiconductor,这款器件在贸泽电子官网上的料号为KX132-1211。
图3:KX132-1211三轴数字加速度计
(图源:贸泽电子)
KX134和KX132三轴数字加速度计是两款硅微机械加速度计,具有用户可配置的3级高级数据路径(ADP),其中包含低通滤波器、低通/高通滤波器和RMS计算引擎,还配备了先进的唤醒和睡眠检测功能。
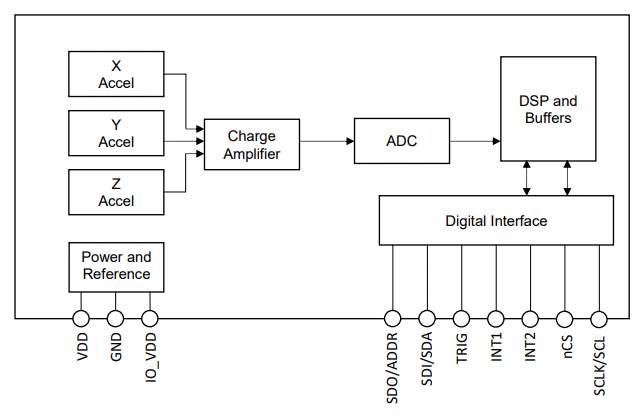
图4:KX132-1211三轴数字加速度计功能框图
(图源:ROHM Semiconductor)
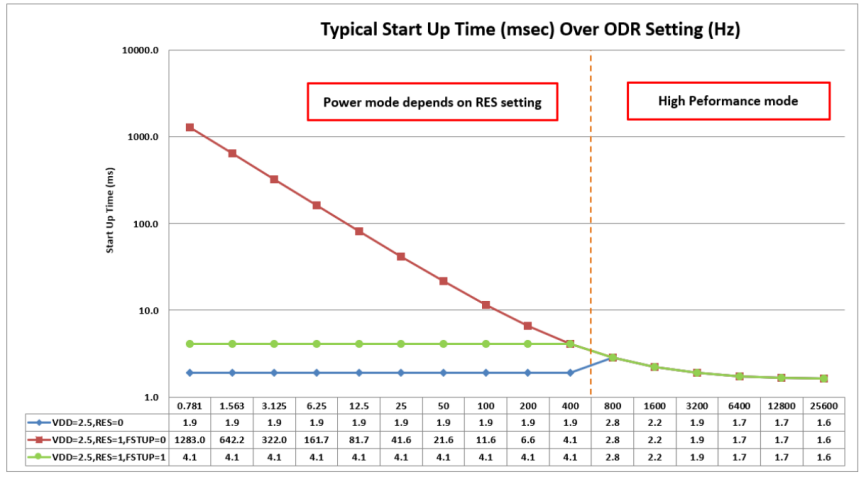
图5:KX132-1211三轴数字加速度计启动时间框图
(图源:ROHM Semiconductor)
KX134和KX132三轴数字加速度计具有高分辨率阈值和高精度。其中,高分辨率阈值可配置到低至15.6mg,还在整个温度范围内降低了噪声并改善了线性度。
在精度方面,KX134-1211用户可配置的g值范围可达±64g,输出数据传输速率可达25600Hz;KX132-1211用户可配置的g值范围可达±16g,输出数据传输速率可达25600Hz 。两款三轴数字加速度计都集成了自由落体、Directional-Tap/Double-Tap和设备定向算法,提高了低功耗模式下基于温度的ODR精度。
KX134和KX132三轴数字加速度计还具有出色的耐热性能和耐冲击能力,并内置稳压器,可应对严苛的工作环境。
灵敏度可选的法兰安装式磁簧传感器
磁力式碰撞传感器也是一种应用广泛的碰撞检测传感器,它通过磁性材料的磁性特性来检测磁场的变化,并将其转换成电信号输出,实现对物理量的测量。作为磁力式碰撞传感器的一种,应用于协作机器人上时,磁簧传感器更多是用于限位和安全访问。
接下来我们为大家推荐一款超小型法兰安装式磁簧传感器,来自制造商Littelfuse,贸泽电子官网上该器件的料号为59155-1-S-02-A。
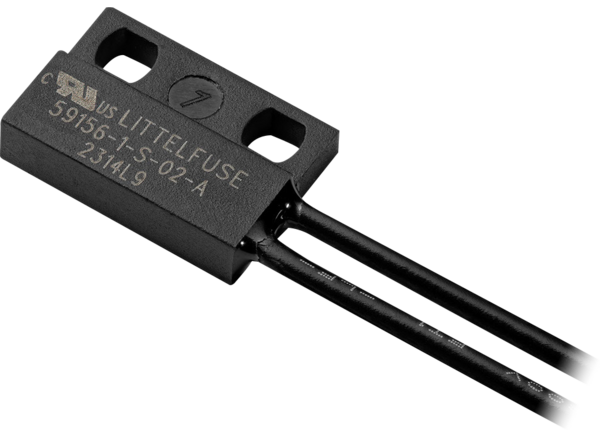
图6:Littelfuse超小型法兰安装式磁簧传感器
(图源:贸泽电子)
59155和59156是Littelfuse新推出的超小型法兰安装式磁簧传感器,与目前市场上类似尺寸的产品相比,59155和59156更加小巧,尺寸仅为12.70mm x 9.00mm x 3.00mm,仅占用1.09cm2电路板空间。
尺寸虽小,不过Littelfuse超小型法兰安装式磁簧传感器的性能很出色。59155和59156具有非常高的切换能力,可以在10W的条件下切换120VAC/170VDC。这些法兰安装式磁簧传感器采用非接触式开关,适合用于潮湿和恶劣环境。他们的法兰支座的外壳设计支持可定制,具有绝佳的可调节性,使其适合不同行业的各种小间距应用,这当然也包括从事严苛复杂工作的协作机器人。
Littelfuse超小型法兰安装式磁簧传感器采用壳体设计,可使用M2螺丝以0.1Nm扭矩进行安装,也支持黏合式安装,因此非常易于使用。除了应用于协作机器人的接近/限位传感、安全和访问控制,这些法兰安装式磁簧传感器也可用于工厂自动化、加工设备、家电和物联网等领域。
协作机器人的柔性交互
对于协作机器人,很多人都熟知它是工作制造领域柔性生产的重要组成部分。面向未来,协作机器人在包括碰撞检测等方面的发展也需要更加柔性。上述我们详述了协作机器人的碰撞检测,现阶段产业也取得了长足进步。不过,从用户的角度来看,这明显还不够。
在部署时,协作机器人对于环境的了解还是半自适应的,需要人类操作其在工作空间内巡航至少一次才能够对路线有大致理解。在和人类交互时,目前协作机器人为了避免碰撞,基本采取直接停止工作的方式应对,和我们理想中的人机协作还有差距。为了进一步提升柔性交互的体验,感知能力、学习能力等方面还需要精进,需要更好的传感器和算法支持。
未来的协作机器人必将会更加智能、灵活、多功能和人性化,贸泽电子也将持续将先进的器件带给大家,与行业和从业者共同成长。
相关威廉希尔官方网站 资源
ROHM Semiconductor 三轴数字加速度计,了解详情>>
Littelfuse 59155和59156法兰安装件,了解详情>>
该发布文章为独家原创文章,转载请注明来源。对于未经许可的复制和不符合要求的转载我们将保留依法追究法律责任的权利。
关于贸泽电子贸泽电子(Mouser Electronics)是一家全球知名的半导体和电子元器件授权代理商,分销超过1200家品牌制造商的680多万种产品,为客户提供一站式采购平台。我们专注于快速引入新产品和新威廉希尔官方网站 ,为设计工程师和采购人员提供潮流选择。欢迎关注我们!
更多精彩

原文标题:一文读懂:为什么碰撞检测是协作机器人的底层威廉希尔官方网站
文章出处:【微信公众号:贸泽电子】欢迎添加关注!文章转载请注明出处。
-
贸泽电子
+关注
关注
16文章
1110浏览量
96600
原文标题:一文读懂:为什么碰撞检测是协作机器人的底层威廉希尔官方网站
文章出处:【微信号:贸泽电子,微信公众号:贸泽电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
自动化新宠打开人机协同的未来,底层芯片如何赋能协作机器人发展?

MiR推出MC600移动协作机器人
优傲机器人升级高负载协作机器人,助力客户生产效率飞跃
探索机器人快换盘威廉希尔官方网站 的未来之路:智能化与协作的革新

工业机器人仿真软件有哪些
海默机器人荣获“中国协作机器人创新产品奖”:创新引领,智造未来

电主轴:教您如何一文读懂?|深圳恒兴隆机电.
PCB行业:用协作机器人,就选大族机器人
富唯智能机器人集成了协作机器人、移动机器人和视觉引导威廉希尔官方网站
科聪协作科聪协作(复合)移动机器人整体解决方案






 工商网监
工商网监
评论