 服务通信接口的定义与使用
服务通信接口的定义与使用
了解了通信接口的概念,接下来我们再从代码实现的角度,研究下如何定义以及使用一个接口。
在之前服务概念讲解的课程中,我们编写了这样一个例程,我们再来回顾下。

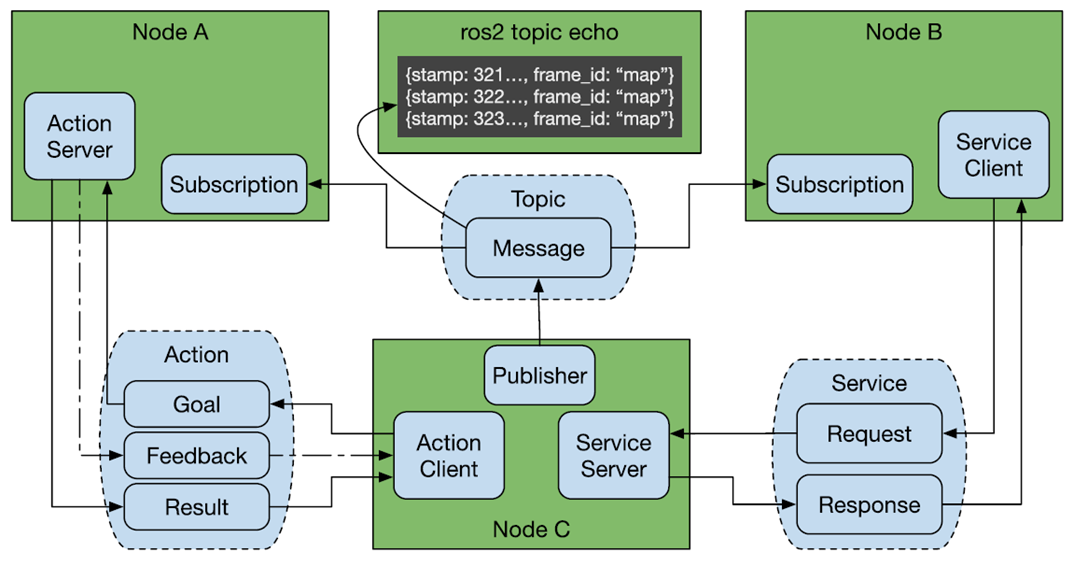
有三个节点:
第一个驱动相机发布图像话题;
第二个是机器视觉识别节点,封装了一个服务的服务端对象,提供目标识别位置的查询服务;
第三个节点在需要目标位置的时候,就可以发送请求,收到位置进行使用了。

接口定义
在这个例程中,我们使用GetObjectPosition.srv定义了服务通信的接口:
learning_interface/srv/GetObjectPosition.srv
bool get # 获取目标位置的指令---int32 x # 目标的X坐标int32 y # 目标的Y坐标
定义中有两个部分,上边是获取目标位置的指令,get为true的话,就表示我们需要一次位置,服务端就会反馈这个x、y坐标了。
完成定义后,还需要在功能包的CMakeLists.txt中配置编译选项,让编译器在编译过程中,根据接口定义,自动生成不同语言的代码:
...find_package(rosidl_default_generators REQUIRED)rosidl_generate_interfaces(${PROJECT_NAME} "srv/GetObjectPosition.srv")...
功能包的package.xml文件中也需要添加代码生成的功能依赖:
... < build_depend >rosidl_default_generators< /build_depend > < exec_depend >rosidl_default_runtime< /exec_depend > < member_of_group >rosidl_interface_packages< /member_of_group > ...
程序调用
我们在代码中再来重点看下接口的使用方法。
客户端接口调用
learning_service/service_object_client.py
#!/usr/bin/env python3# -*- coding: utf-8 -*-"""@作者: 古月居@说明: ROS2服务示例-请求目标识别,等待目标位置应答"""import rclpy # ROS2 Python接口库from rclpy.node import Node # ROS2 节点类from learning_interface.srv import GetObjectPosition # 自定义的服务接口class objectClient(Node): def __init__(self, name): super().__init__(name) # ROS2节点父类初始化 self.client = self.create_client(GetObjectPosition, 'get_target_position') while not self.client.wait_for_service(timeout_sec=1.0): self.get_logger().info('service not available, waiting again...') self.request = GetObjectPosition.Request() def send_request(self): self.request.get = True self.future = self.client.call_async(self.request)def main(args=None): rclpy.init(args=args) # ROS2 Python接口初始化 node = objectClient("service_object_client") # 创建ROS2节点对象并进行初始化 node.send_request() while rclpy.ok(): rclpy.spin_once(node) if node.future.done(): try: response = node.future.result() except Exception as e: node.get_logger().info( 'Service call failed %r' % (e,)) else: node.get_logger().info( 'Result of object position:n x: %d y: %d' % (response.x, response.y)) break node.destroy_node() # 销毁节点对象 rclpy.shutdown() # 关闭ROS2 Python接口
服务端接口调用
learning_service/service_object_server.py
#!/usr/bin/env python3# -*- coding: utf-8 -*-"""@作者: 古月居(www.guyuehome.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
通信接口
+关注
关注
3文章
237浏览量
30982 -
服务端
+关注
关注
0文章
66浏览量
7006 -
ROS
+关注
关注
1文章
278浏览量
17004
发布评论请先 登录
相关推荐
ROS通信接口机制介绍
ROS通信接口 接口可以让程序之间的依赖降低,便于我们使用别人的代码,也方便别人使用我们的代码,这就是ROS的核心目标,减少重复造轮子。 ROS有三种常用的通信机制,分别是话题、

fpga仿真器接口定义
FPGA(Field-Programmable Gate Array,现场可编程门阵列)仿真器接口的定义主要依赖于仿真器的具体设计和所支持的通信协议。在FPGA的设计和仿真过程中,接口
SIM卡座的接口定义
SIM卡座连接器的接口定义是移动通信设备中不可或缺的一部分,确保了SIM卡与设备之间的稳定通信和数据传输。在本文中,连欣科技将详细探讨一下SIM卡座的





 工商网监
工商网监
评论