 机器视觉中精度和分辨率详解!
机器视觉中精度和分辨率详解!
在机器视觉中,分辨率作为衡量镜头和工业相机的重要参数,被大家熟知。精度是机器视觉中最核心的参数之一。我们一起来了解下这两个参数以及在实际组合应用中,如何有效匹配镜头分辨率和相机分辨率。
精度需要从多个角度来说明,根据行业经验,定位应用一般需要考虑3个像素波动,故原本10μm的精度要求,对应的定位精度约为3μm左右,而此时的视觉定位精度也就是像素精度,也叫像素分辨率或者像素当量,对于检测应用,算法能力直接决定了视觉检测精度与待检测的最小缺陷之间的关系,通常也要考虑3-5个像素波动,但在晶圆检测行业,如果算法好,我们也常遇到直接按最小缺陷的大小来定义视觉检测精度的情况,此时视觉检测精度也是像素精度,测量应用包含绝对精度和重复性精度,绝对精度指测量值和真实值之间的差异,重复性精度只用同一个物体去做静态测量和多次摆放测量,看数据的实际波动性,当重复性精度足够好时,绝对精度可以进行算法补偿,因此实际应用中重复性精度更为重要。一般情况下,重复性精度可等同于像素精度。相机像素精度=单向视野范围/相机单向分辨率。
1、镜头分辨率
镜头分辨率指的是它能分辨开两个靠近的点物的能力。实际应用中,我们一般用“点物”经镜头成像后的“像”能被分辨的最小距离来表示,小于这个距离,我们就认为是一个点;而大于这个距离我们认为是两个分开的点。除此之外,还有一种表示形式就是每毫米线对数LP/mm。镜头之所以存在分辨率,是因为像差和衍射导致的(此处不做详细解释),使从“物”到“像”发生了失真。点物经镜头成像后不再是一点,而变成一个光斑。
2、相机分辨率
相机的分辨率是指单位距离的像用多少个像素来显示。假设像元尺寸大小是2.2μm,搭配0.5x的镜头,在测量22μm的物体时,由于22μm的物经0.5x的镜头后变成11μm的像,所以要用11 μm /2.2 μm =5个pixel来显示,因此,单位距离的像要用11÷2.2/11=1/2.2个像素来显示。即相机图像分辨率为1/2.2 pixel/μm(实际就是像元尺寸的倒数)。从这个推导中我们得出:像元尺寸越小,相机的分辨率越高。
镜头分辨率与相机分辨率的有效匹配?
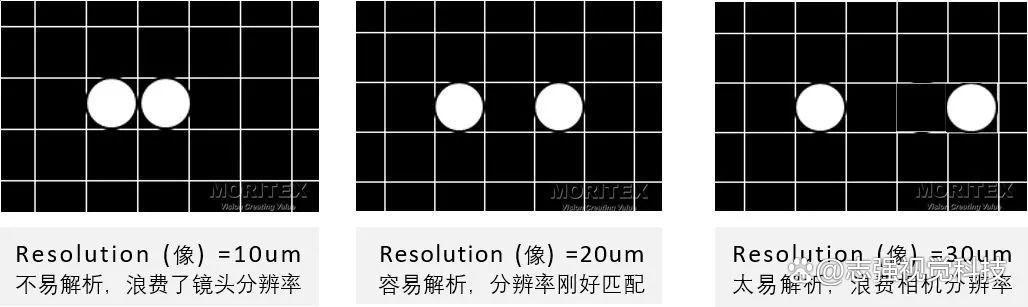
方法一:一般参数表中标记的分辨率为镜头的物方分辨率;用物方分辨率乘以放大倍率,得到像方分辨率;用算得的像方分辨率跟2倍的像元尺寸作比较:①如果镜头像方分辨率=2倍的像元尺寸,说明匹配刚刚好,谁都不浪费。
② 如果镜头像方分辨率>2倍的像元尺寸,则浪费了相机的分辨率。
③ 如果镜头像方分辨率<2倍的像元尺寸,则浪费了镜头的分辨率。
1Pixel=10um
 镜头分辨率和相机分辨率
镜头分辨率和相机分辨率方法二:经透镜成的光学图像,本身是一个拥有无穷多个点的interwetten与威廉的赔率体系 信号。但在图像接收器(CCD或CMOS)接收过程中,由于像素和像素之间的间距形成了离散采样。采样定律也叫Shannon采样定律,告诉我们对于频率为f的模拟信号,为了不失真的恢复它,我们至少要用2f的频率来采样。
镜头分辨率的另一种表示形式是空间频率,即每毫米的线对数LP/mm。因此,假设镜头的分辨率是n LP/mm,那么我们必须保证每毫米有2n个像素才行。这样才能充分发挥镜头的分辨能力。例如:我们的ML-MC-XR系列和ML-M-UR系列都标注了分辨率是200LP/mm, 所以用每毫米有400个像素的芯片来接收图像,才不会浪费镜头的分辨率,而每毫米400个像素,计算下来像元尺寸大小差不多2.2 μm,这也就是为什么我们会同时标注该款镜头支持2.2 μm像元。
其他注意事项:
1、镜头分辨率,只是镜头本身的参数,与相机无关。
2、相机的分辨率,也只是相机本身的参数,与像元尺寸大小有关,与镜头无关。
3、两个相互独立的分辨率一定要匹配,才不会浪费了某一方的性能。
4、无论是镜头还是相机,分辨率只是评价成像质量的参数之一,而且分辨率也不是越高越好,如果要评价整体性能,还要同时综合考虑其他参数及具体应用。
-
相机
+关注
关注
4文章
1350浏览量
53593 -
分辨率
+关注
关注
2文章
1059浏览量
41924 -
机器视觉
+关注
关注
162文章
4369浏览量
120295 -
工业镜头
+关注
关注
0文章
89浏览量
3988
发布评论请先 登录
相关推荐
请问ISO7720的时间分辨率有多少?
HDMI接口支持哪些视频分辨率
设计基于机器视觉的高分辨率双远心物镜

Moritex 5X 高分辨率远心镜头 助力晶圆检测

VR显示器分辨率的选择
伺服电机编码器的分辨率是多少
激光雷达分辨率对比方法与技巧详解

伺服编码器分辨率越高越快吗?

基于CNN的图像超分辨率示例
华为pockets屏幕分辨率是多少
编码器分辨率是什么意思 编码器分辨率和脉冲数的关系

关于直线电机模组分辨率、定位精度和重复定位精度浅谈
浅谈相机的图像分辨率






 工商网监
工商网监
评论