 TogetherROS系统的通信功能测试
TogetherROS系统的通信功能测试
通信测试
先来测试一下TogetherROS™·Bot系统的通信功能。
我们需要启动两个终端,分别连接到旭日X3派上,并分别按以下命令配置环境变量。
终端1:
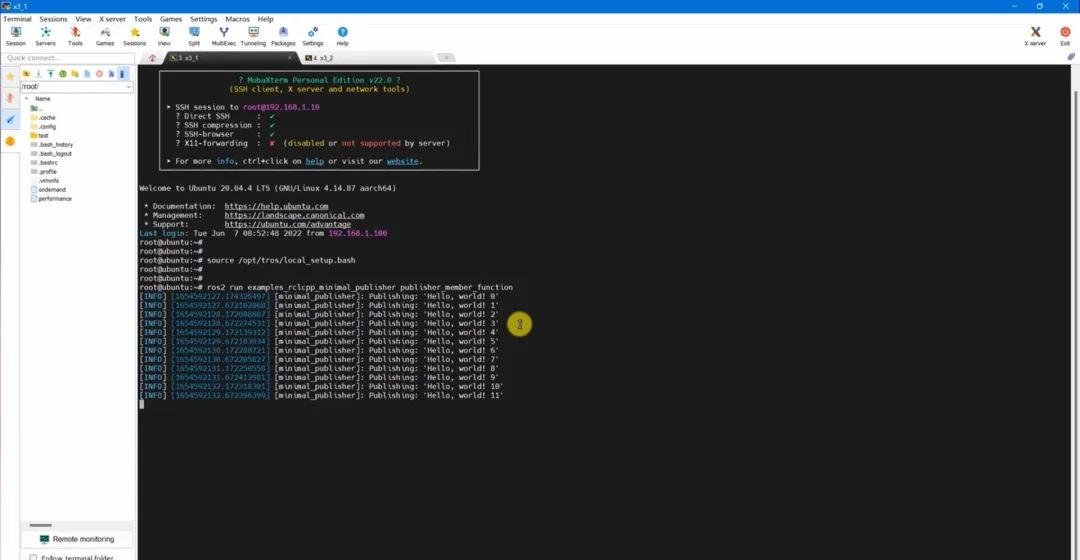
** source /opt/tros/local_setup.bash** ros2 run examples_rclcpp_minimal_publisher publisher_member_function
终端2:
** source /opt/tros/local_setup.bash** ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
接下来,我们用ros2 run命令运行节点:
运行第一个例程:
ros2 run example_rclcpp_minimal_publisher publisher_member_function
这是一个用C++写的最小化的发布者程序,其中节点叫publisher_member+function,按回车运行该节点。
可以看到这个节点开始不断循环发布信息,每次发布的信息为字符串形式,内容是“Hello,world! +数字”。
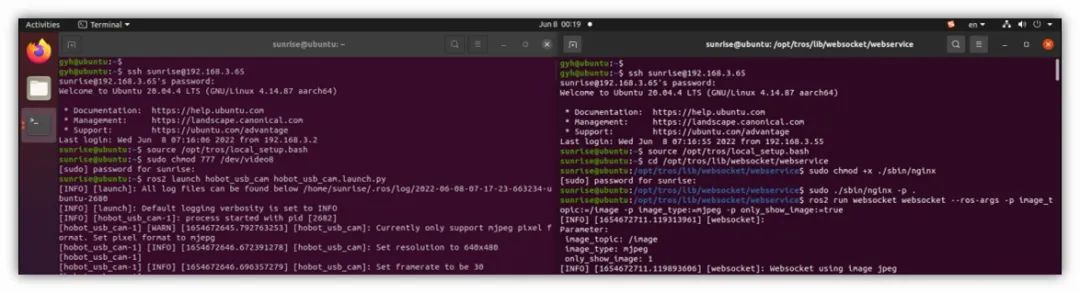
同样,在终端2的命令行窗口,输入以下命令并回车开启订阅者节点。
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
这个订阅者节点会获取到、并显示出刚才发布者节点发布的信息。

通过这样一个例程,我们验证了两个节点之间的通信没有问题。这这是一个基于DDS的话题通信。
按CTRL+C可以关闭该例程。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28390浏览量
206957 -
ROS
+关注
关注
1文章
278浏览量
17004 -
系统
+关注
关注
1文章
1015浏览量
21332
发布评论请先 登录
相关推荐
VXI/GPIB总线的通信设备测试诊断系统设计
。两者结合使系统的通用性,功能及测量带宽的扩充性和电磁兼容能力进一步提高。因此,航天测控通信设备测试诊断系统采用以VXI总线为主,GPIB为
发表于 11-16 15:08
无线通信系统的安装维护测试
无线通信系统的安装维护测试要求体积小、重量轻、操作简单、电池续航时间长的仪 器仪表,对性能指标没有台式仪器仪表那么严格。配备有网络分析仪和频谱仪的手持 式仪表几乎可以满足安装维护所有测试
发表于 10-27 09:52
数据通信测试仪表功能概述
调制解调器、用户终端设备等。在网络建设中进行系统连接、安装调试、网络验收时,在网络建成后的维护检查、判断和排除故障时,都离不开测试仪表。数据通信测试仪表主要有
发表于 06-21 06:35
LabVIEW系统设计和RF通信
通常能够跨越设计过程各个阶段和功能的工具都尝试着减少每个阶段和功能之间的限制,而不是创建可跨越所有阶段和功能的单一环境和语言。例如,在新兴的 RF 通信标准开发中,
发表于 10-17 16:42
•8次下载


纳特通信的多探头球面近场测试系统与紧缩场测试系统(远场)
纳特通信承建国内首套192探头近场测试系统;纳特通信承建国内首套5G 3米静区紧缩场测试系统
TogetherROS Bot相机驱动方法
TogetherROS™·Bot相机驱动 除此之外,TogetherROS™·Bot中也提供了USB摄像头的驱动节点,连接摄像头之后,直接设置设备的权限和TogetherROS的环境变量就可以使用了
TogetherROS系统中如何配置网络连接
无论是旭日X3派,还是TogetherROS,在正式使用之前,都还需要进行一些必要的配置,完善必要的功能模块,提供完整的算力支持,达到最佳状态。 网络连接 第一个配置,是无线网络连接。 当然,大家也
在TogetherROS中如何安装ROS2功能包
安装ROS2功能包 接下来,还有一个很重要的配置,那就是安装ROS2功能包,我们说TogetherROS是基于ROS2深度优化的,很多模块还是会复用ROS2中的功能,所有ROS2的原生

NB-IOT类产品的通信功能生产测试方案
的影响。 在这个阶段,测试人员会精心设计一系列的测试用例,涵盖了不同的网络环境、数据传输量以及通信协议等方面。通过模拟真实的使用场景,对 NB 产品的 Socket 通信






 工商网监
工商网监
评论