 如何利用LiDAR实现深度感测
如何利用LiDAR实现深度感测
LiDAR简介
LiDAR的全称是Light Detection and Ranging(激光探测及测距),是一种利用激光感测距离的方法,它会测量激光从物体反射回来所用的时间而达到测距的目的。根据具体应用,可以使用不同的波长,但最常用的是红外线(IR)。
大多数时候,人脑擅长推断物体的相对深度/距离和大小,这是人类的一种本能,尤其是在驾驶车辆时。但成像系统却很难做到这一点,尤其是标准图像传感器是用2D图像表示3D场景。在类似于人眼的立体布局中使用两个图像传感器,能够提取深度数据,但测距精度有限,并且会受到环境光线的影响。
使用LiDAR获得深度数据就可以在不依赖光线条件的情况下实施测量,并消除图像的模糊问题,从而做到场景中区分及理解不同物体。将发射到物体后反射回来的光脉冲与精准定时测量相结合,可以计算出物体的距离。
LiDAR在汽车领域的应用十分广泛,尤其是用于SAE级别为L3~L5的半自动驾驶车辆,例如,感测车辆周围的物体;在高速公路上看到数百米外的前方。LiDAR也常用于送货机器人和其他需要自主感知的应用。该威廉希尔官方网站 也广泛应用于以高精度快速生成可处理的3D深度图的户外应用情景——而使用传统测量威廉希尔官方网站 时,这一过程需要耗时数日。
例如,农业领域使用LiDAR测量田地或土地,绘制地图、评估作物状况,从而使农民能够建模预测作物产量,以及选择最合适的农药/肥料。对于储存在筒仓中的谷物和储存在贮存罐中的液体,只需在筒仓/贮存罐顶部安装LiDAR,即可在不与内容物接触的情况下立即测量储量。
环境组织经常使用LiDAR来评估森林砍伐情况、测量海岸侵蚀情况或监测冰川消退情况。此外,在这些应用中,通过在无人驾驶飞行器(UAV)/无人机上安装LiDAR,研究人员能够对人迹罕至的偏远地区进行勘测,而无需亲自前往。
智能工厂在自动引导车(AGV)上使用LiDAR,运输原材料进行加工,并将成品运送到发货区。当智能工厂中的机器人使用LiDAR时,可以充分发挥LiDAR自身的强大功能,帮助这些机器人精确执行任务,并使它们能够感测周围是否有人,从而以周到和安全的方式工作。
LiDAR可用于快速勘测铁路或高速公路等大型建设项目。LiDAR还可以作为一种安全辅助手段,使某些区域免受不必要或意外的入侵。这在存在危险物质或有大型机器工作的地方意义重大。LiDAR在所有照明条件下都能有效工作,意味着在这些类型的应用中,它可以提供可靠的永远在线的保护。
LiDAR的类型
最常见的LiDAR类型是直接飞行时间(dToF)系统,其背后的原理非常简单:测量光脉冲到达目标并返回传感器所用的时间。光速是一个已知的物理常数,因此计算发射器/探测器和反射目标之间的距离十分简单。
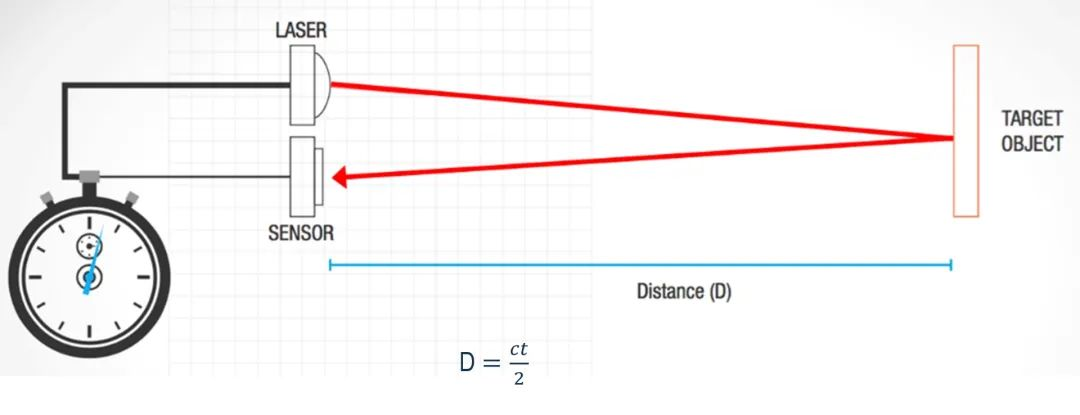
图 1:dTOF可测量光到达目标并返回所需的时间
该威廉希尔官方网站 通常使用由光源(最常见的是激光器)发射的单个非常短的脉冲,发射同时会激活一个精确的计时器。当光脉冲击中范围内的物体时,它将反射回到通常与激光器并置排列的高灵敏度光传感器。一旦探测到返回脉冲,计时器就停止计时,这时可读取到达物体并返回所用的时间。
只要知道从发送脉冲到收到回波经过的时间(t),使用光速常数(c)计算到目标物体的距离(D)就很简单了。
dToF方法快速有效,可以测量多个回波,因此能够探测LiDAR视野内的多个物体。它能够用于远程和近程 (0.1 m~300 m)应用,并且在整个范围内保持稳定的高精度。
另一种LiDAR方法称为间接飞行时间(iToF),同样使用来自激光的连续光波。这种方法不会直接测量经过的ToF,而是根据已发射和已接收波形之间的相位差来确定ToF。
iToF威廉希尔官方网站 更适合相对短的距离测量(<10 m),尤其是光线条件没有室外那么具有挑战性的室内应用,室外的对比度通常要高得多。该威廉希尔官方网站 只能探测到最强的回波,因此只能探测单个物体。
第三种LiDAR是调频连续波(FMCW),适合近程和远程测距。该威廉希尔官方网站 用可调谐激光器来产生连续光波,所产生的光波将在探测器处与反射光混合。这种混合可在本地波形和反射波形之间产生拍频,由此计算出物距和方向速度。
虽然FMCW既有出色的测距性能,还能捕获方向速度信息,但由于要使用带有偏振控制的可调谐激光器,并且依赖短波红外波长(要求激光器和探测器使用特殊半导体),这种LiDAR系统的总体成本大大增加。
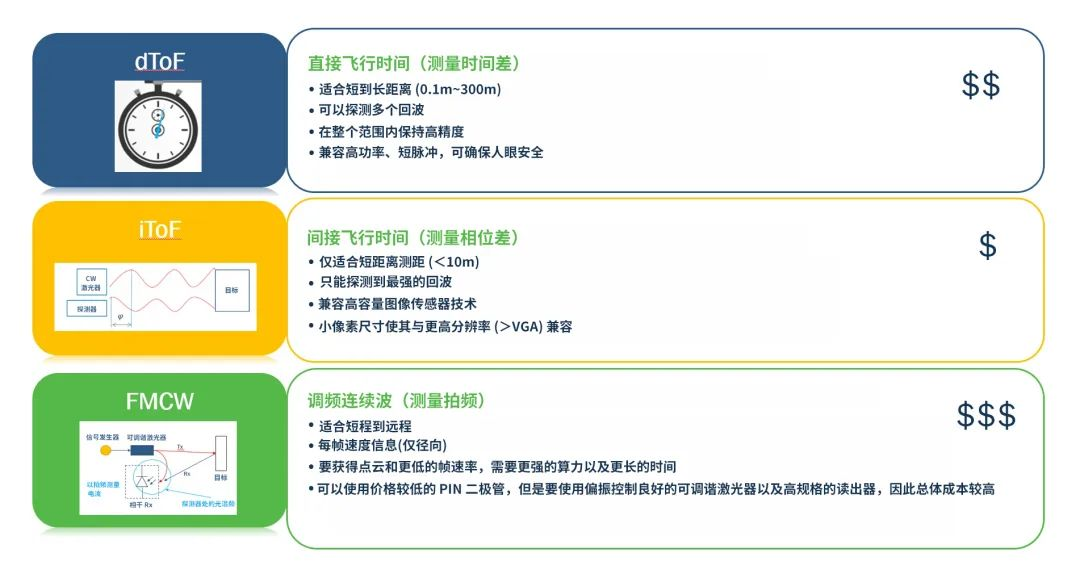
图 2:基于LiDAR的深度感测方法比
“波长大辩论”
围绕LiDAR最有争议的话题之一是使用哪种波长。IR的使用优先于可见光,因为背景IR要少得多,所得信噪比(SNR)更好,从而使探测返回光变得更加容易。
IR光谱范围内有多个合适的波长,包括近红外(NIR)光谱(850 nm、905 nm、940 nm)和短波红外(SWIR)光谱(1350 nm、1550 nm)。决定具体使用哪种波长是“波长大辩论”的关键议题。有三个最重要的标准需要考虑,分别是系统的性能、是否有合适的组件和系统的总体成本。
探测器是任何LiDAR系统中最基本的组件之一。CMOS硅基探测器可探测到波长在400 nm至1000 nm范围内的光,因此其对可见光和NIR光敏感,但不能感测SWIR光。为了探测SWIR光,就必须使用InGaAs合金等III/V族半导体,与硅相比,InGaAs合金非常昂贵。
组件可用性是另一个考虑因素,尤其是就激光发射器而言。边缘发射激光器(EEL)正逐渐为垂直腔面发射激光器(VCSEL)所取代,后者更容易封装成阵列,并且在整个温度范围内波长稳定。虽然VCSEL目前的能效较低,价格也较高,但随着它们应用范围的不断拓展,这种情况有望得到改善。
尽管SWIR EEL有多家供应商,但目前SWIR VCSEL只有一家供应商,而NIR VCSEL也有多家供应商。因此,选择NIR更有可能提高供应链的安全性。
探测范围很重要,因为这能够增加可用的反应时间,从而提高安全性。但激光过强会伤害眼睛,因此IEC 60825规定了1ns激光脉冲的最大容许照射量(MPE)。
虽然NIR必须具有较低的MPE,但如果脉冲宽度缩短,则可以提高激光功率,而由于使用灵敏的探测器,可以达到最长300 m的测距范围。在天气好的时候,SWIR的测距范围将超过NIR,但是SWIR更容易受到湿气(如雨或雾)的不利影响,因此基于NIR的系统的性能下降速度将低于SWIR系统,从而可以在各种天气条件下提供更一致的性能。
基于以上所述,通常认为NIR是汽车LiDAR的首选波长。NIR使得我们可以使用硅基器件,而不是InGaAs等更加昂贵的材料,可能更重要的是,相关组件可以从多个供应商处获得,有助于建立起更强大的供应链。虽然NIR和SWIR在工作时都能够确保人眼安全,但NIR在使用较低功率激光的同时,仍然能够满足汽车LiDAR的要求。
从商业角度来看,NIR的成本要低得多,而成本一直是汽车应用方面的一个重要考虑因素。IHS Markit的一项调查(Amsrud,2019)显示,激光器和探测器的每通道成本约为4至20美元,而对于类似的SWIR系统,每通道成本约为275美元。即使有了进一步发展、容量增加,但预计NIR的成本仍将比SWIR低10~100倍。
LiDAR构成威廉希尔官方网站
任何LiDAR系统最重要的元件之一是可捕获和量化反射激光的感测元件。虽然可以使用多种威廉希尔官方网站 来实现这一点,但硅光电倍增器(SiPM)通常表现最好,这主要是因为它能够以近似1,000,000数量级的高增益来探测单个光子。
因此,近年来SiPM的应用越来越广泛,已然成为LiDAR深度感测应用的首选传感器。与雪崩光电二极管(APD)等传统探测器(不仅增益低得多,还需要对传入信号进行积分)相比,这些器件能够在高对比度条件下为长距离测距提供最高的SNR性能。其他优势包括电源偏置更低、均匀性更好,以及对温度变化的灵敏度降低等,使得SiPM成为使用APD的系统的理想升级选项。SiPM灵敏度更高,可以使用小封装光模块,因此使LiDAR更容易集成到车辆中。由于SiPM采用高容量CMOS工艺生产,这些高性能器件的探测器成本最低,进一步推动了LiDAR的普及。
安森美(onsemi)的ArrayRDM-0112A20-QFN是一个具有0.47 mm x 1.12 mm SiPM像素的1×12单片阵列,基于先进的专有RDM SiPM CMOS工艺,专为实现对NIR光的高灵敏度而开发,能够在905 nm波长下使光子探测效率(PDE)达到行业领先的18.5%。在这个波长下,响应度大于100 kA/W。
由于SiPM的内部增益高,灵敏度可降至单光子水平,再加上高PDE,能够探测出微弱的返回信号。这使得LiDAR系统可以探测更远距离的低反射率目标。该阵列采用稳定可靠的10 mm x 5.2 mm QFN封装,可以访问12个独立像素。
该阵列专为汽车LiDAR系统(包括闪光灯、机械或MEMS扫描LiDAR)而设计,是第一个获得AEC-Q102 汽车认证的阵列,并已根据IATF 16949标准进行开发。由于该阵列成本低、性能高,可以实现经济高效的远程LiDAR方案,提高汽车的安全性和自主性水平。
总结
LiDAR是一项有着重要意义的威廉希尔官方网站 ,因为它的扫描系统能够快速准确地确定深度,既可以进行单点扫描,也可以绘制物体或大型场地的3D图。
在规划LiDAR设计时,关键是要决定使用哪种IR光波长。综合考量性能、是否有合适的组件和商业因素,NIR通常是首选。
在大多数LiDAR实现过程中,激光光源可能相对简单,但探测器的选择对系统性能有很大影响。安森美的最新SiPM阵列具有出色的探测性能,更重要的是,对于汽车应用来说,它是首款获得AEC-Q102认证的SiPM探测器。
参考文献
Amsrud, P.(2019 年 9 月 25日)。实现低成本LiDAR系统的竞争[会议报告]。汽车LiDAR 2019,美国密歇根州底特律。
文章来源: 安森美
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28390浏览量
206957 -
激光
+关注
关注
19文章
3188浏览量
64454 -
感测
+关注
关注
0文章
22浏览量
12830 -
LIDAR
+关注
关注
10文章
326浏览量
29415
发布评论请先 登录
相关推荐

LIDAR激光雷达逆向建模能用到revit当中吗
LiDAR激光点云数据处理软件处理流程
lidar激光雷达扫描仪有什么用
lidar传感器和ryyb哪个好
利用Matlab函数实现深度学习算法
利用TensorFlow实现基于深度神经网络的文本分类模型
基于SPAD单光子相机的LiDAR威廉希尔官方网站 革新

如何利用CNN实现图像识别
深度揭秘磁环磁环共模电感线圈漏感的原因
什么是LiDAR?LiDAR威廉希尔官方网站 的新时代 前景广阔未来可期
康谋分享|aiSim5激光雷达LiDAR模型验证方法(二)

LiDAR4D:基于时空新颖的LiDAR视角合成框架
Valeo为何坚守着LiDAR?
基于LiDAR点流的运动事件检测






 工商网监
工商网监
评论