 机械臂连杆Link的描述
机械臂连杆Link的描述
标签用来描述机器人某个刚体部分的外观和物理属性,外观包括尺寸、颜色、形状,物理属性包括质量、惯性矩阵、碰撞参数等。
以这个机械臂连杆为例,它的link描述如下:

link标签中的name表示该连杆的名称,我们可以自定义,未来joint连接link的时候,会使用到这个名称。
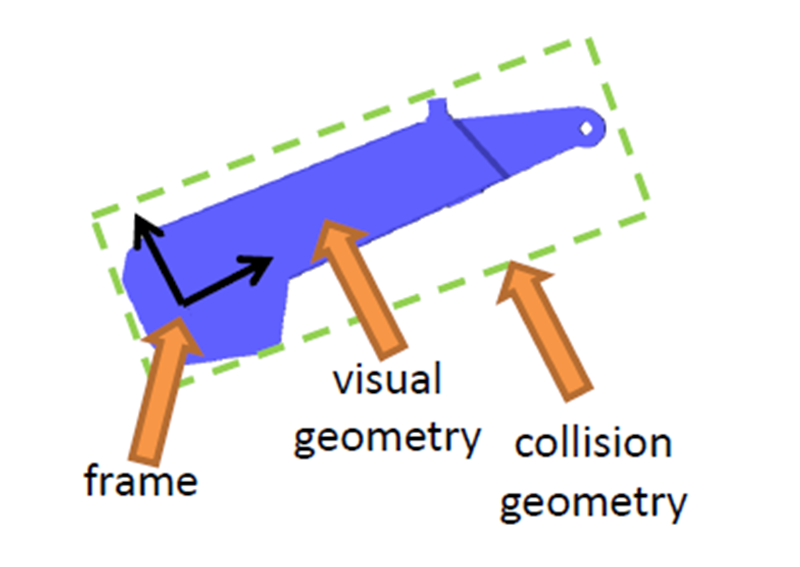
link里边的部分用来描述机器人的外观,比如:
表示几何形状,里边使用调用了一个在三维软件中提前设计好的蓝色外观,就是这个stl文件,看上去和真实机器人是一致的
表示坐标系相对初始位置的偏移,分别是x、y、z方向上的平移,和roll、pitch、raw旋转,不需要偏移的话,就全为0。
第二个部分,描述碰撞参数,里边的内容似乎和一样,也有和,看似相同,其实区别还是比较大的。
部分重在描述机器人看上去的状态,也就是视觉效果;
部分则是描述机器人运动过程中的状态,比如机器人与外界如何接触算作碰撞。在这个机器人模型中,蓝色部分是通过来描述的。
在实际控制过程中,这样复杂的外观在计算碰撞检测时,要求的算力较高,为了简化计算,我们将碰撞检测用的模型简化为了绿色框的圆柱体,也就是里边描述的形状。
坐标系偏移也是类似,可以描述刚体质心的偏移。
如果是移动机器人的话,link也可以用来描述小车的车体、轮子等部分。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28418浏览量
207088 -
移动机器人
+关注
关注
2文章
762浏览量
33572 -
机械臂
+关注
关注
12文章
515浏览量
24584 -
机器臂
+关注
关注
0文章
18浏览量
6308
发布评论请先 登录
相关推荐
【FireBLE申请】基于leapmotion的智能机械臂
申请理由:申请了个基于leapmotion智能机械臂的创新项目,现在申请到了国家的补助,希望用蓝牙来完成传输部分,减少开发成本,完善开发稳定项目描述:体感的传感器基于leapmotion的摄像头和红外传感器,用蓝牙来传输数据到
发表于 08-08 12:12
【NV32F100x申请】基于stm32的机械臂控制
申请理由:项目描述:检验系统流畅性,包括外观布局,以及硬件电路分布的合理性。做过基于PLC的机械臂控制,现在想控制成本,做基于STM32的机械臂
发表于 10-28 16:08
关于机械臂的设计问题
本帖最后由 tangwentao 于 2019-12-16 15:14 编辑背景: 公司本来搞软件的,现在跟别人合作,要搞个机械臂的东西。要求: 1.这个机械臂要搭载一个摄像头,然后由
发表于 12-16 15:32
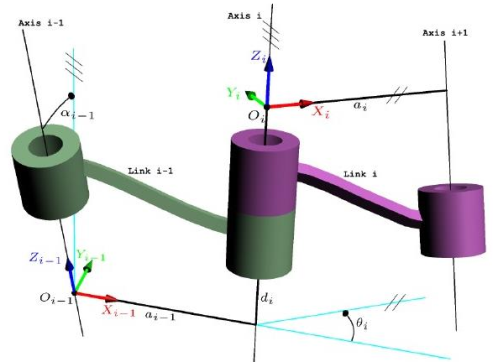
求一种机械臂建模D-H方法
D-H法机械臂建模D-H建模方法是由D和H两个人提出的,是用于机器人运动学上的建模方法,该方法是在每个连杆上建立一个坐标系,通过齐次变换来实现两个连杆上的坐标变换。通过依次的变换最终可
发表于 01-20 08:12
机械臂的控制学习
机械臂的控制-------------控制器1.位置控制机器人最传统,最常用的控制方式就是位置控制,它能以0误差来达到指定位置或以0误差跟随指定轨迹。普通的位置控制,是控制机器人末端到指定的地点(让
发表于 02-23 07:49

如何选择一款六轴机械臂作为入门(教育或者研究)机械臂?
未来的趋势绝对是机器人代替人工作业,机械臂首当其冲。如今机械臂工业化已经比较成熟,许多人都开始对机械臂

机械臂结构是什么样的
该机械臂 6 个关节都是转动关节,前 3 个关节确定手腕参考点的位置,后 3个关节确定手腕的方位。和大多数工业机器人一样,后 3个关节轴线交于一点。因此将该点作为手腕的参考点,也选作为连杆坐标系{4





 工商网监
工商网监
评论