 基于动力学模型的机器人介绍
基于动力学模型的机器人介绍
机器人具有高度非线性,强时变以及强耦合等动力学特性,为了提高机器人控制的性能,研究人员提出了基于模型的控制(Model Based Control)方法。
在机器人研究领域,多种常见的高性能机器人控制器如计算力矩控制(Compute Torque Control)和阻抗控制(ImpedanceControl)等均需要使用机器人动力学模型。
机器人系统模型包括机器人动力学模型和机器人运动学模型,不精确动力学模型可能会导致控制性能的降低,甚至会引起系统的不稳定。
常用的机器人动力学建模方法包括拉格朗日动力学建模方法和牛顿 - 欧拉动力学建模方法等。通过 “虚位移” 和 “ 虚功” 的概念,引入广义坐标来减少运动方程和约束方程的数量,在动力学普遍方程的基础上建立了拉格朗日方程。
汉密尔顿基于著名的汉密尔顿原理,在动量和动能关系的基础上建立了哈密尔顿运动方程,为拉格朗日方程提供了另一种推导方法。
设计基于模型的控制器要求建立的模型具有足够高的计算效率,可以使用黎曼几何和李群李代数的相关概念描述开环和闭环机器人系统的运动学方程,推导出递推形式的动力学方程。在建立动力学模型过程中,获取精确的机器人模型参数具有重要作用。
需要引入机器人动力学模型参数辨识的原因:动力学参数因为受到测量手段以及机械结构的限制,通过参数估计来获得相对准确的动力学参数:基于最小二乘法,神经网络控制逼近模型中的未建模动态。
无法确保估计参数的收敛性,而重要的是消除非线性系统中建模误差带来的影响。
阻抗/导纳控制是希望机器人呈现质量-阻尼-弹簧的二阶系统的动态特性,机器人阻抗控制是间接地控制机器人和环境间的作用力,其设计思想是建立机器人末端作用力与其位置偏差之间的动态关系通过控制机器人位移而达到控制末端作用力的目的保证机器人在受约束方向保持期望的接触力。
而传统的机器人力位置控制研究难点:提高系统对干扰系统模型误差、外界千扰以及测量噪声影响的鲁棒性,阻抗控制方法受系统动力学模型、外界干扰、力测量影响小。
目的:阻抗控制旨在在不确定的环境下实现预期的机械相互作用。
阻抗控制目前研究的问题:耦合稳定性分析、力跟踪阻抗控制、混合阻抗控制、鲁棒阻抗控制、自适应阻抗控制、学习阻抗控制等。
阻抗控制和导纳控制的主要区别为如下因果关系:阻抗控制是基于测量的位置(差值)来控制外力,而导纳控制则是基于测量的外力(差值)来控制位置。
-
机器人
+关注
关注
211文章
28390浏览量
206944 -
动力学
+关注
关注
0文章
105浏览量
16969 -
阻抗控制
+关注
关注
1文章
55浏览量
10646
发布评论请先 登录
相关推荐
先进机器人控制
请问各位在labview MathScript节点中 以下这个机器人的动力学公式应该怎么编写呢?
机器人工具箱中的常用函数介绍
一个描述机器人刚体动力学的系统模型
PDF——工业机器人威廉希尔官方网站 及应用
基于Matlab和VR威廉希尔官方网站 的移动机器人建模及仿真
空间柔性机器人动力学分析的快速积分算法
跨越式高压输电线路巡线机器人动力学研究
《机器人学》—运动控制与动力学
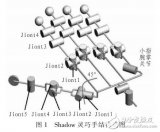
Shadow仿人灵巧手动力学研究
水下机器人威廉希尔官方网站 解析之水动力学系数
综合车辆动力学仿真软件ModelBase的简单介绍
基于车辆动力学模型的横向控制






 工商网监
工商网监
评论