 EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化
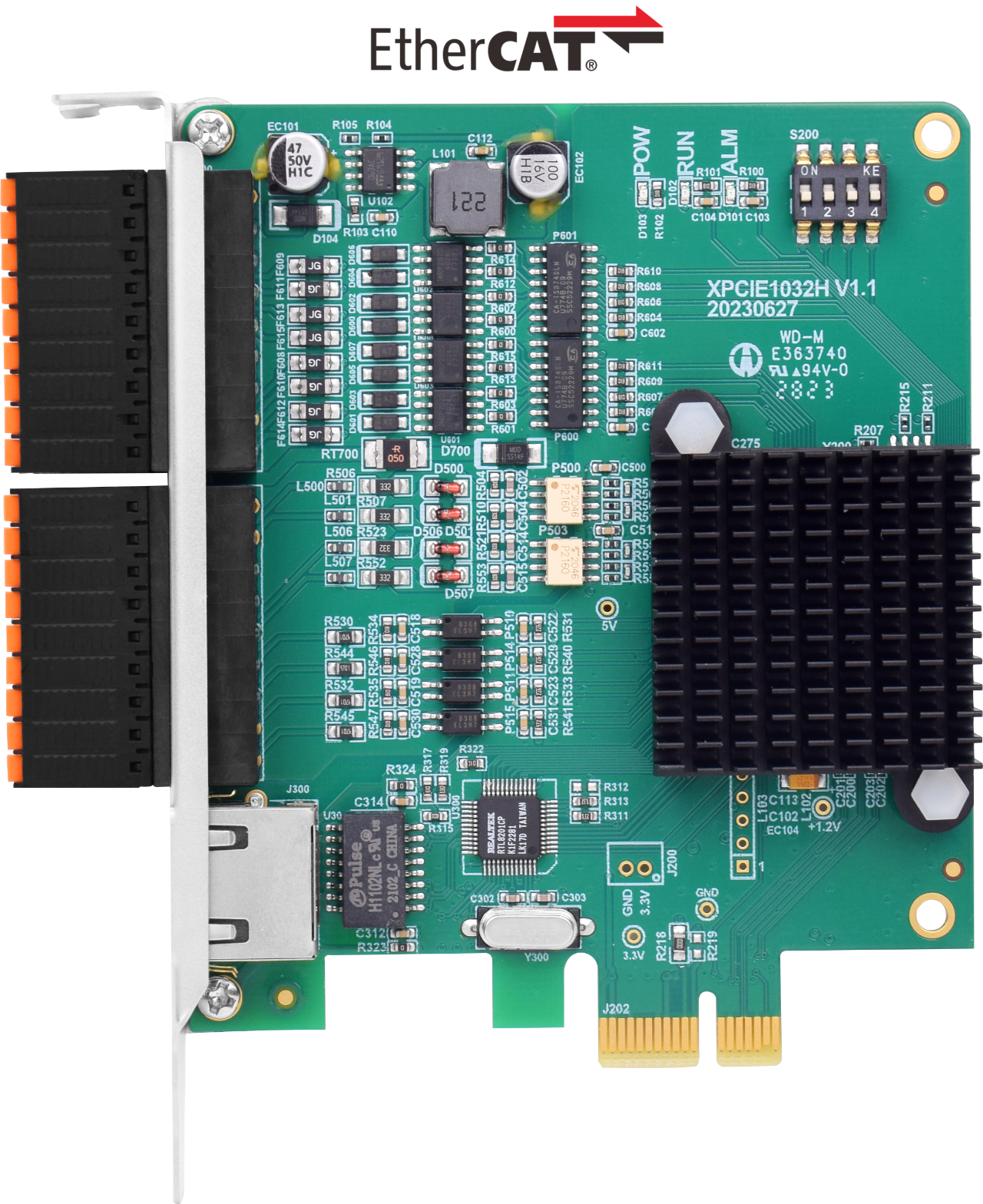
XPCIE1032H功能简介
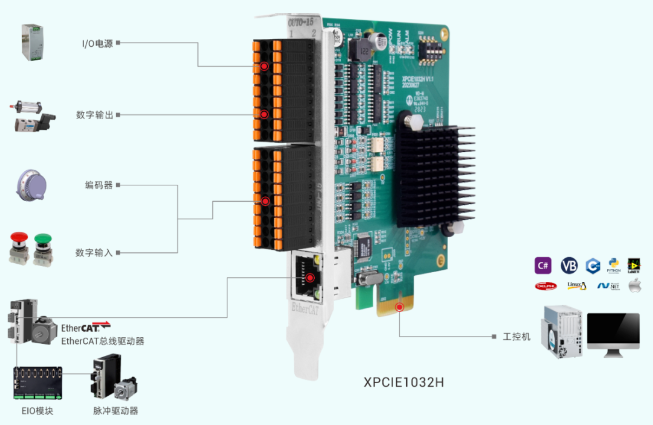
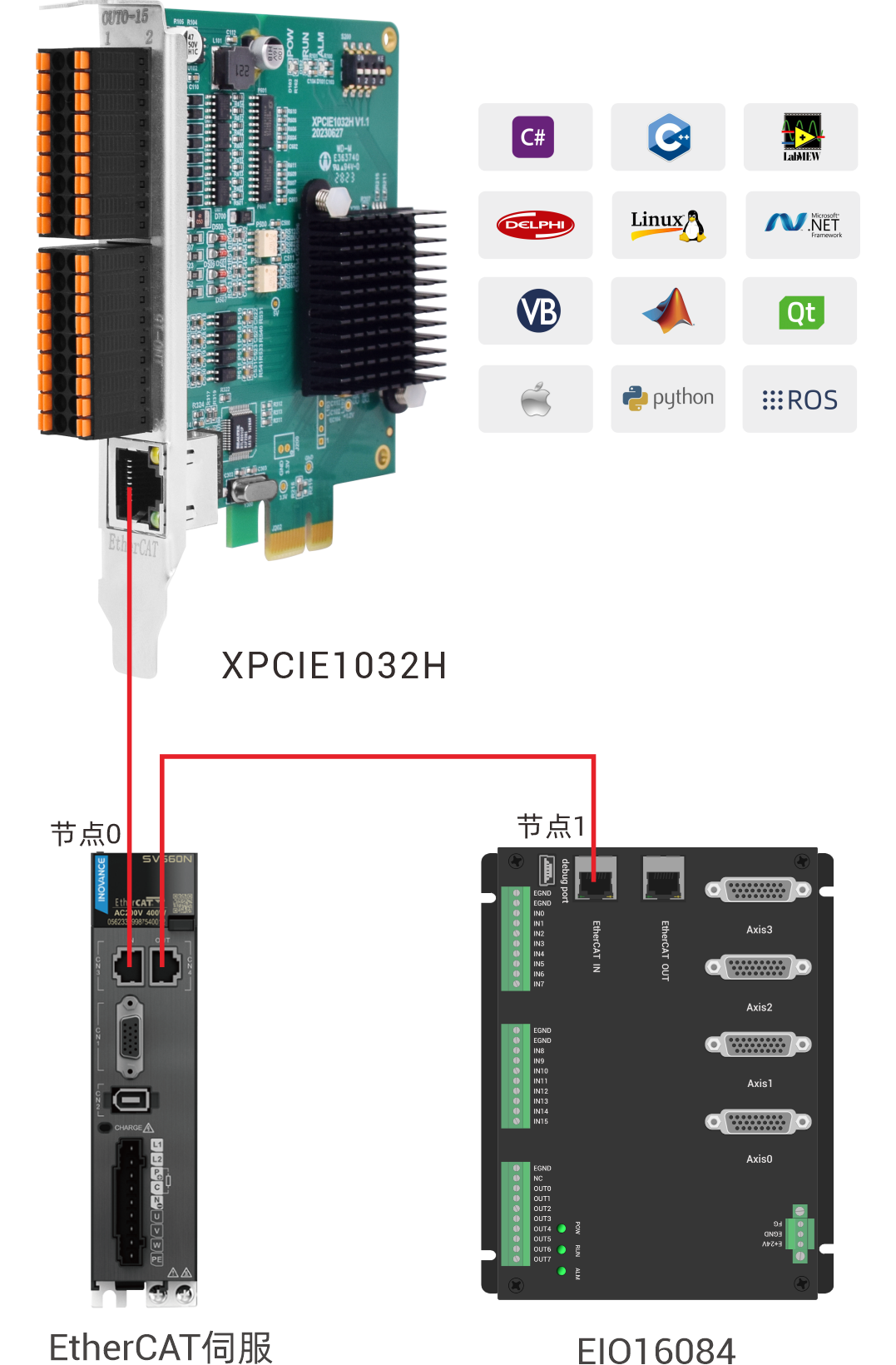
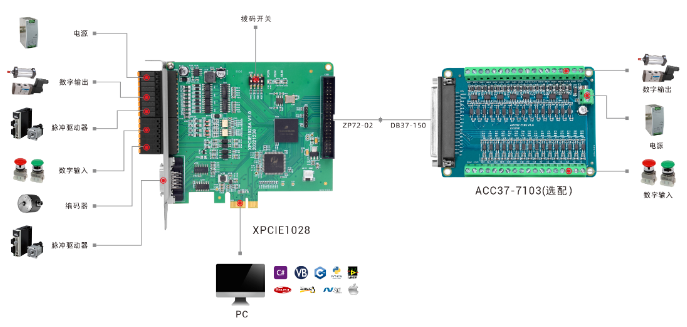
XPCIE1032H是一款基于PCI Express的EtherCAT总线运动控制卡,可选6-64轴运动控制,支持多路高速数字输入输出,可轻松实现多轴同步控制和高速数据传输。XPCIE1032H集成了强大的运动控制功能,结合MotionRT7运动控制实时软核,解决了高速高精应用中,PC Windows开发的非实时痛点,指令交互速度比传统的PCI/PCIe快10倍。
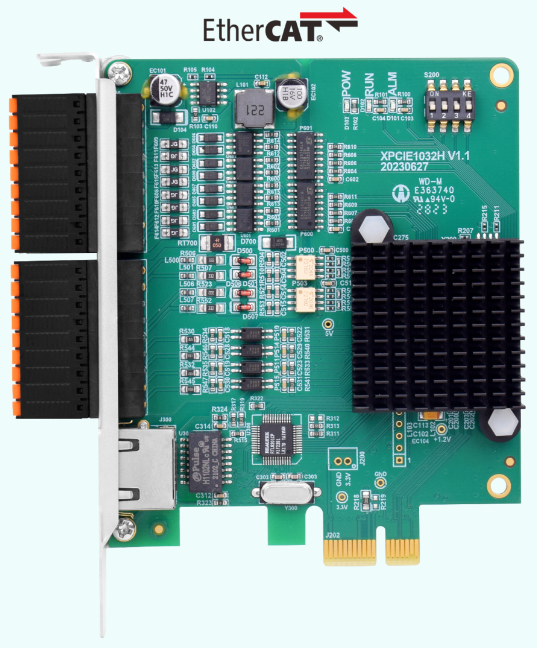
XPCIE1032H 支持PWM,PSO功能,板载16进16出通用IO口,其中输出口全部为高速输出口,可配置为4路PWM输出口或者16路高速PSO硬件比较输出口。输入口含有8路高速输入口,可配置为4路高速色标锁存或两路编码器输入。
XPCIE1032H搭配MotionRT7实时内核,使用本地LOCAL接口连接,通过高速的核内交互 ,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间可以达到3-5us左右。
➜XPCIE1032H与MotionRT7实时内核的配合具有以下优势:
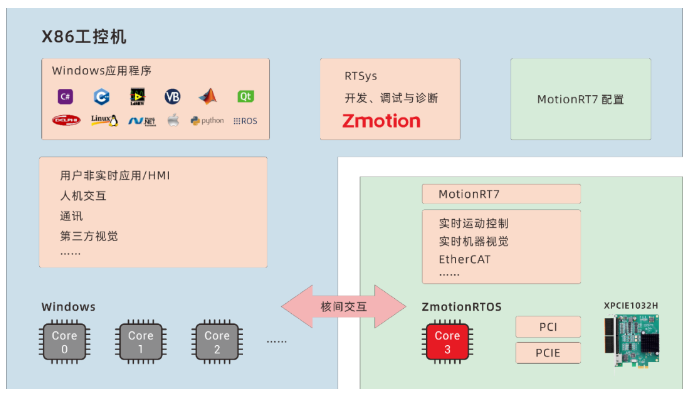
1.支持多种上位机语言开发,所有系列产品均可调用同一套API函数库;
2.借助核内交互,可以快速调用 运动指令,响应时间快至微秒级,比传统PCI/PCIe快10倍;
3.解决传统PCI/PCIe运动控制卡在Windows环境下控制系统的非实时性问题;
4.支持一维/二维/三维PSO(高速硬件位置比较输出),适用于视觉飞拍、精密点胶和激光能量控制等应用;
5.提供高速输入接口,便于实现位置锁存;
6.支持EtherCAT总线和脉冲输出混合联动、混合插补。

➜使用XPCIE1032H和MotionRT7进行项目开发时,通常需要进行以下步骤:
1.安装驱动程序,识别XPCIE1032H;
2.打开并执行文件“MotionRT710.exe”,配置参数和运行运动控制实时内核;
3.使用ZDevelop软件连接到控制器,进行参数监控。连接时请使用PCI/LOCAL方式,并确保ZDevelop软件版本在3.10以上;
4.完成控制程序开发,通过LOCAL链接方式连接到运动控制卡,实现实时运动控制。

➜与传统PCI/PCIe卡和PLC的测试数据结果对比:

我们可以从测试对比结果看出,XPCIE1032H运动控制卡配合实时运动控制内核MotionRT7,在LOCAL链接(核内交互)的方式下,指令交互的效率是非常稳定,当测试数量从1w增加到10w时,单条指令交互时间与多条指令交互时间波动不大,非常适用于高速高精的应用。
XPCIE1032H卡安装
关闭计算机电源。
打开计算机机箱,选择一条空闲的XPCIE卡槽,用螺丝刀卸下相应的挡板条。
将运动控制卡插入该槽,拧紧挡板条上的固定螺丝。
XPCIE1032H驱动安装与建立连接参考往期文章EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接。
一、新建C#项目(VS2022)

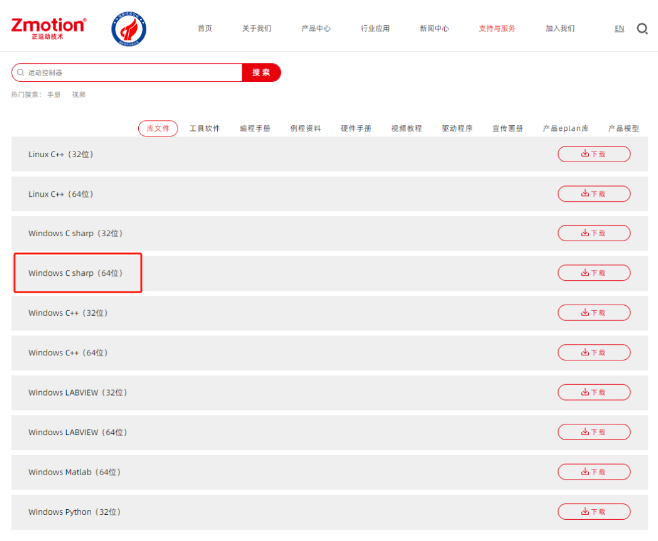
到正运动威廉希尔官方网站 官网的下载中心选择需要的平台库文件。
解压下载的安装包找到 “ Zmcaux.cs ” , “ zauxdll.dll ” , “ zmotion.dll ” 放入到项目文件中。
1、“Zmcaux.cs”放在项目根目录文件中,与bin目录同级。
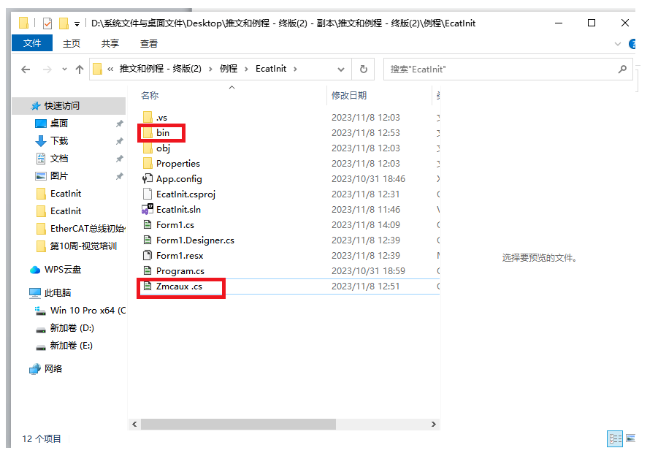
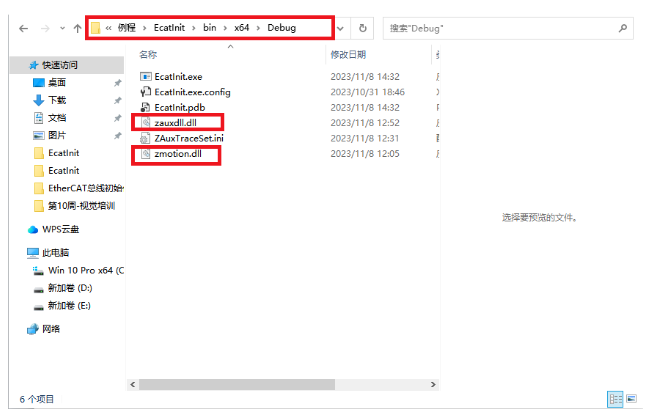
2、“zauxdll.dll”,“zmotion.dll”放在bin -> Debug。
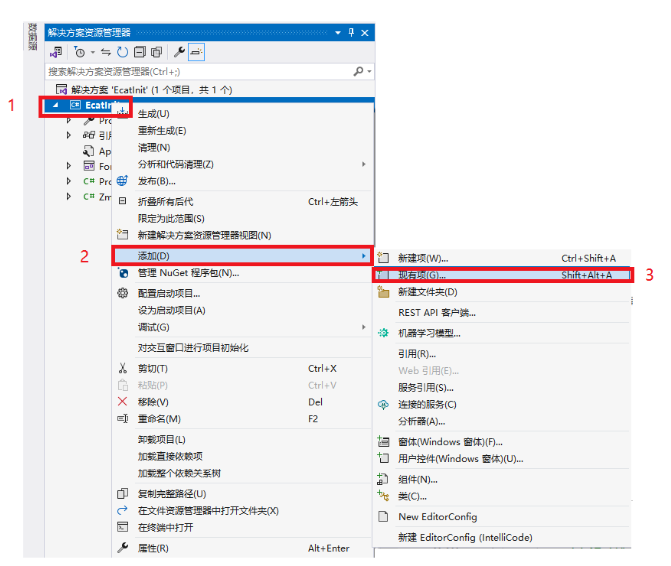
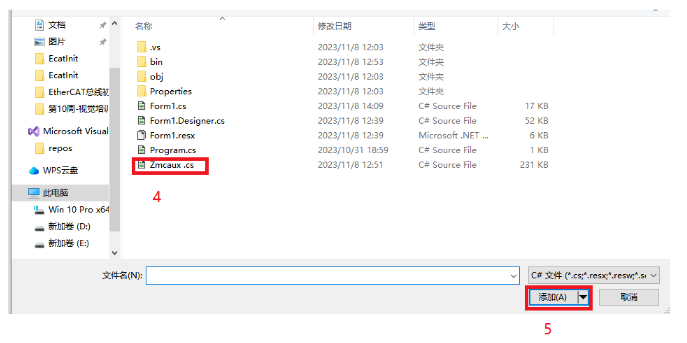
用vs打开新建的项目文件,在右边的解决方案资源管理器中点击显示所有,选中项目,右键“添加”->“现有项”,选中zmcaux.cs文件添加进在项目中。
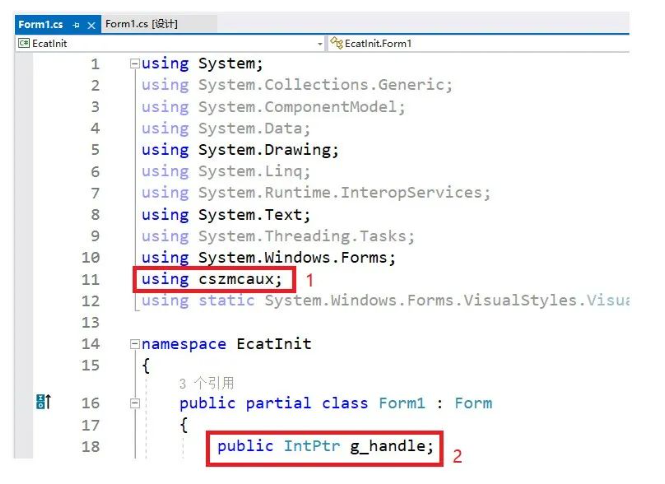
双击Form1.cs里面的Form1,出现代码编辑界面,在文件开头写入using cszmcaux,并声明控制器句柄g_handle。
二、相关PC函数介绍
相关PC函数介绍详情可参考“ZMotion PC函数库编程手册 V2.1.1”。

其他基本轴参数指令:

在form设计界面找到需要用到的控件拖拽到窗体中进行UI界面设计,设计效果图如下。
三、相关程序以及设计思路
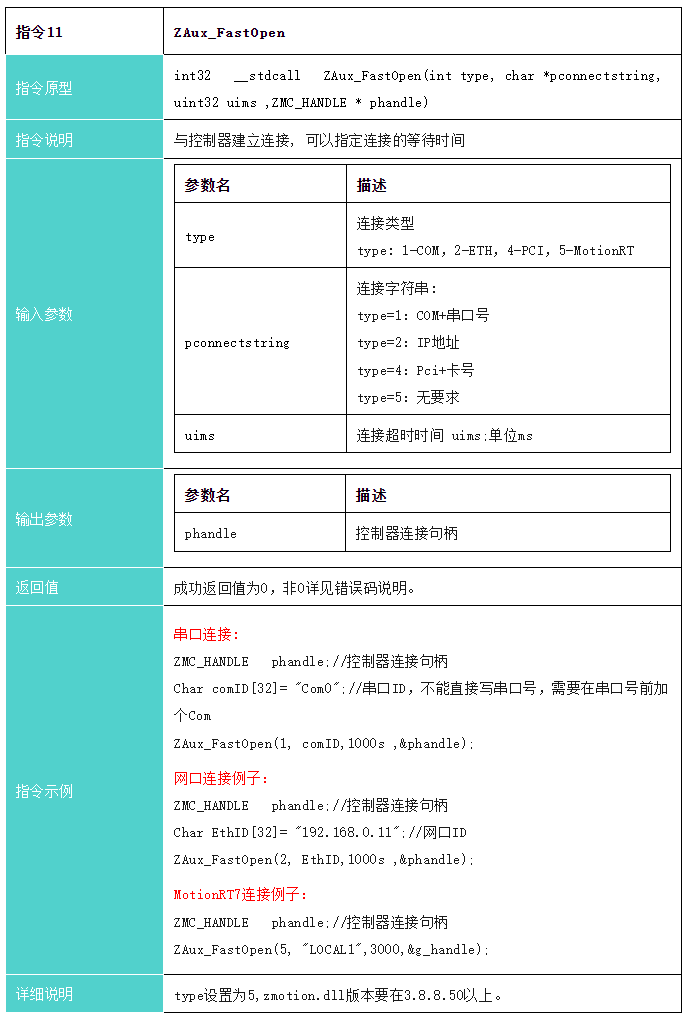
1、通过LOCAL链接方式,按钮控件的的click事件触发链接控制卡。
private void Local_Connect_Button_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
Local_DisConnect_Button_Click(sender, e);
}
zmcaux.ZAux_FastOpen(5, "local", 1000, out g_handle);
if (g_handle != (IntPtr)0)
{
this.Text = "已链接";
timer1.Enabled = true;
Local_Connect_Button.BackColor = Color.Green;
MessageBox.Show("链接成功");
}
else
{
MessageBox.Show("链接失败,请选择正确的LOCAL!");
}
}
2、选择总线初始化的bas脚本文件下载到控制器rom里面掉电保存。
提前在zdevelop软件根据需求修改总线初始化的basic程序,映射轴,节点IO等初始化内容。这里以节点0(汇川驱动器-0轴)、节点1(EIO16084)的1-4轴映射为总线轴为例,将节点之间通过ETHERCAT口连接起来。如下图:
相关初始化basic 程序(其中红色为指令,可以到正运动官网查阅其使用场景以及方法)。
相关配置如下:
'ECAT总线初始化 GLOBAL CONST BUS_TYPE = 0 '总线类型。可用于上位机区分当前总线类型 GLOBAL CONST Bus_Slot = 0 '槽位号0(单总线控制器缺省0) GLOBAL CONST PUL_AxisStart = 0 '本地脉冲轴起始轴号 GLOBAL CONST PUL_AxisNum = 0 '本地脉冲轴轴数量 GLOBAL CONST Bus_AxisStart = 0 '总线轴起始轴号 GLOBAL CONST Bus_NodeNum = 1 '总线配置节点数量,用于判断实际检测到的从站数量是否一致 GLOBAL MAX_AXISNUM '最大轴数 MAX_AXISNUM = SYS_ZFEATURE(0) GLOBAL Bus_InitStatus '总线初始化完成状态 Bus_InitStatus = -1 GLOBAL Bus_TotalAxisnum '检查扫描的总轴数 DELAY(3000) '延时3S等待驱动器上电,不同驱动器自身上电时间不同,具体根据驱动器调整延时 ?"总线通讯周期:",SERVO_PERIOD,"us" Ecat_Init() '初始化ECAT总线 END GLOBAL SUB Ecat_Init() local Node_Num,Temp_Axis,Drive_Vender,Drive_Device,Drive_Alias RAPIDSTOP(2) for i = 0 to SYS_ZFEATURE(0) - 1 '初始化还原轴类型 AXIS_ENABLE(i) = 0 ATYPE(i) = 0 DELAY(20) next Bus_InitStatus = -1 Bus_TotalAxisnum = 0 SLOT_STOP(Bus_Slot) DELAY(200) SLOT_SCAN(Bus_Slot) '扫描总线 if return then ?"总线扫描成功","连接从站设备数:"NODE_COUNT(Bus_Slot) if NODE_COUNT(Bus_Slot) < > Bus_NodeNum then '判断总线检测数量是否为实际接线数量 ?"" ?"扫描节点数量与程序配置数量不一致!" ,"配置数量:"Bus_NodeNum,"检测数量:"NODE_COUNT(Bus_Slot) Bus_InitStatus = 0 '初始化失败。报警提示 endif '"开始映射轴号" for Node_Num = 0 to NODE_COUNT(Bus_Slot)-1 '遍历扫描到的所有从站节点 Drive_Vender = NODE_INFO(Bus_Slot,Node_Num,0) '读取驱动器厂商 Drive_Device = NODE_INFO(Bus_Slot,Node_Num,1) '读取设备编号 Drive_Alias = NODE_INFO(Bus_Slot,Node_Num,3) '读取设备拨码ID if NODE_AXIS_COUNT(Bus_Slot,Node_Num) < > 0 then '判断当前节点是否有电机 for j=0 to NODE_AXIS_COUNT(Bus_Slot,Node_Num)-1 '根据节点带的电机数量循环配置轴参数(针对一拖多驱动器) Temp_Axis = Bus_AxisStart + Bus_TotalAxisnum '轴号按NODE顺序分配 BASE(Temp_Axis) AXIS_ADDRESS = Bus_TotalAxisnum+1 '映射轴号 ATYPE = 65 '设置控制模式 65-位置 66-速度 67-转矩 DRIVE_PROFILE = 18 Sub_SetDriverIo(Temp_Axis,Drive_Vender,48 + 48*Temp_Axis) '映射驱动器IO IO映射到控制器IO32-以后每个驱动器间隔32点 DISABLE_GROUP(Temp_Axis) '每轴单独分组 Bus_TotalAxisnum = Bus_TotalAxisnum+1 '总轴数+1 next endif next ?"轴号映射完成","连接总轴数:"Bus_TotalAxisnum WA 200 SLOT_START(Bus_Slot) '启动总线 if return then WDOG = 1 '使能总开关 for i = Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1 BASE(i) DELAY 50 AXIS_ENABLE = 1 next Bus_InitStatus = 1 ?"轴使能完成" ?"总线开启成功" else ?"总线开启失败" Bus_InitStatus = 0 endif else ?"总线扫描失败" Bus_InitStatus = 0 endif ENDSUB '总线驱动IO映射 'iAxis - 轴号 iVender - 驱动器类型 i_IoNum - 输入输出起始编号 GLOBAL SUB Sub_SetDriverIo(iAxis,iVender,i_IoNum) DRIVE_IO(Iaxis) = i_IoNum FWD_IN(Iaxis) = i_IoNum REV_IN(Iaxis) = i_IoNum + 1 DATUM_IN(Iaxis) = i_IoNum + 2 INVERT_IN(i_IoNum,ON) INVERT_IN(i_IoNum + 1,ON) INVERT_IN(i_IoNum + 2,ON) ENDSUB
利用按钮的click事件,浏览选择编辑好的bas文件下载掉电保存,并弹出反馈下载是否成功的提示。
private void BasFileDownLoad_Btn_Click(object sender, EventArgs e) { if (g_handle == (IntPtr)0) { MessageBox.Show("未链接到控制器!", "提示"); } else { int tmpret = 0; string strFilePath; OpenFileDialog openFileDialog1 = new OpenFileDialog(); openFileDialog1.InitialDirectory = ""; openFileDialog1.Filter = "配置文件(*.bas)|*.bas"; openFileDialog1.RestoreDirectory = true; openFileDialog1.FilterIndex = 1; if (openFileDialog1.ShowDialog() == DialogResult.OK) { //打开配置文件 strFilePath = openFileDialog1.FileName; //下载到ROM tmpret = zmcaux.ZAux_BasDown(g_handle, strFilePath, 1); if (tmpret != 0) { MessageBox.Show("文件下载失败!", "提示"); } else { MessageBox.Show("文件下载成功!", "提示"); } } } }
3、通过按钮控件的click事件触发初始化。
调用函数库的ZAux_Execute函数(在线命令),通过在线命令调用basic脚本里面的总线初始化函数-- Ecat_Init()进行总线初始化。
private void EcatInitStart_Btn_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未链接到控制器!", "提示");
}
else
{
int tmpret;
//-1可能正在执行初始化
if ((BasFlag == true) && (InitStatus != -1))
{
InitStatus = -1;
StringBuilder buffer = new StringBuilder(10240);
tmpret = zmcaux.ZAux_Execute(g_handle, "RUNTASK 1,Ecat_Init", buffer, 0); //任务1重新运行BAS中的初始化函数
if (tmpret != 0)
{
MessageBox.Show("总线初始化失败!", "提示");
return;
}
else
{
MessageBox.Show("总线初始化成功!", "提示");
}
}
else
{
MessageBox.Show("Bas文件未加载");
return;
}
}
}
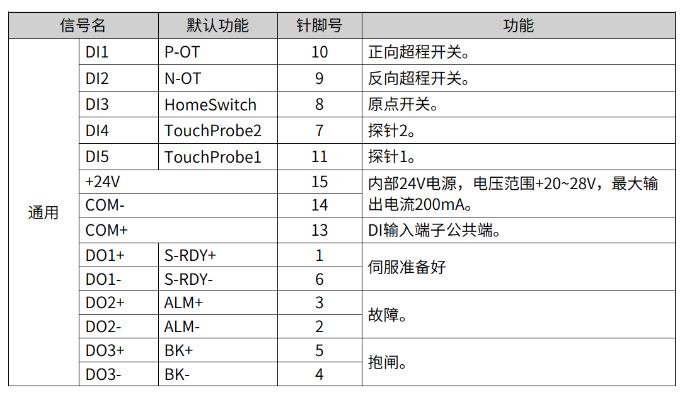
4、以汇川驱动器为例,驱动器IO映射的起始地址为DI1,也就是正向超程开关(正硬限位),若要设置负向超程开关,将起始地址加1。
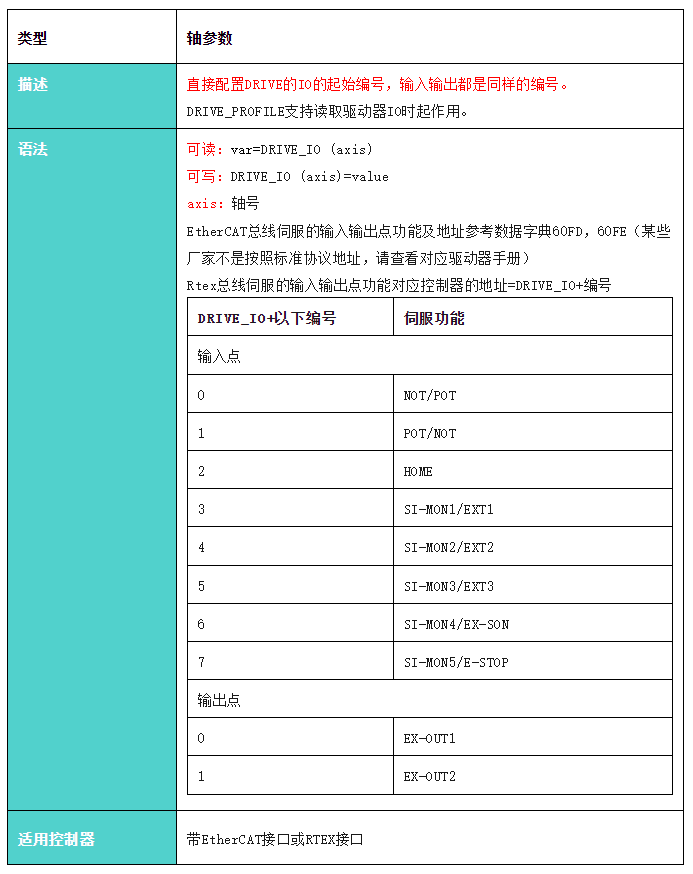
可以通过按钮控件的click事件,触发设置轴的软限位,以及原点、正负硬限位。驱动器IO映射的basic指令是DRIVE_IO。在这里调用在线命令的PC函数去实现驱动器IO映射。
Basic指令说明见下图:
DRIVE_IO -- 驱动器IO:
通过按钮控件的click事件,配置轴的正负软限位和驱动器IO起始地址(正负硬限位IO映射)。
private void Configure_OK_Button_Click(object sender, EventArgs e)
{
StringBuilder buffer = new StringBuilder(10240);
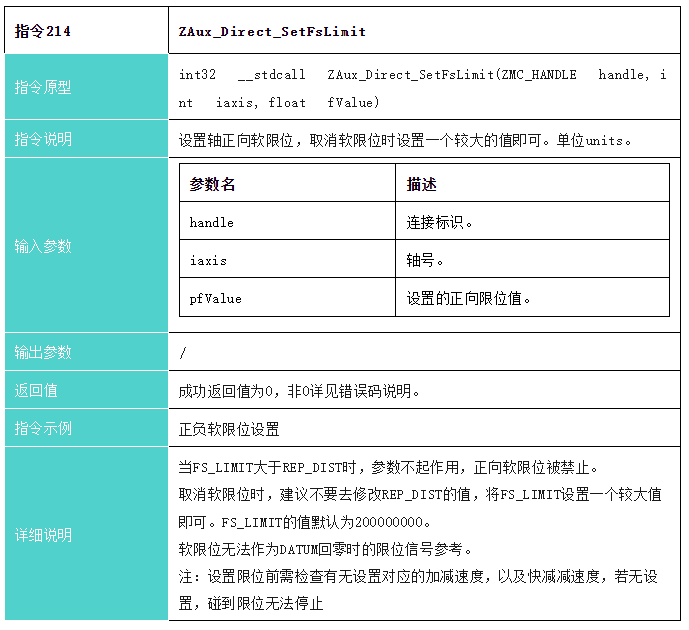
//正向软限位设置
zmcaux.ZAux_Direct_SetFsLimit(g_handle, MoveAxis, Convert.ToSingle(FSLimit_Value.Text));
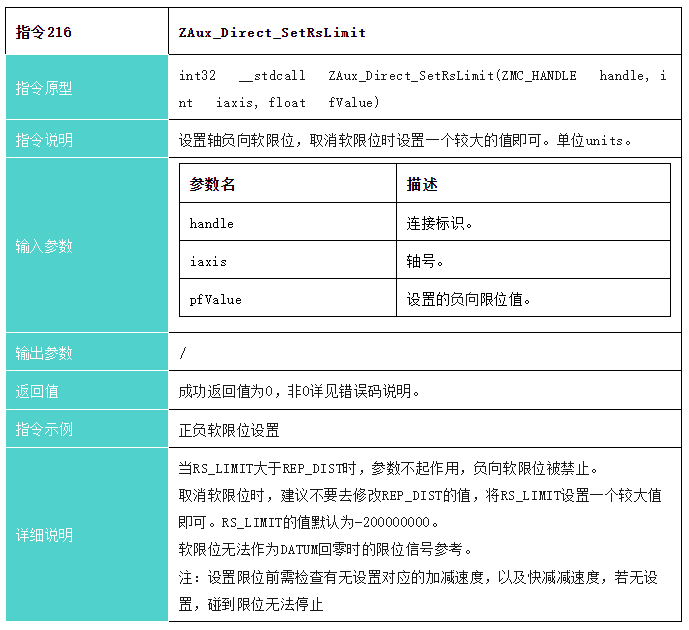
//负向软限位设置
zmcaux.ZAux_Direct_SetRsLimit(g_handle, MoveAxis, Convert.ToSingle(RSLimit_Value.Text));
//驱动器IO起始地址
zmcaux.ZAux_Execute(g_handle, "DRIVE_IO(" + MoveAxis.ToString() + ") = " +DriveStart_IO_Value.Value.ToString(), buffer, 0);
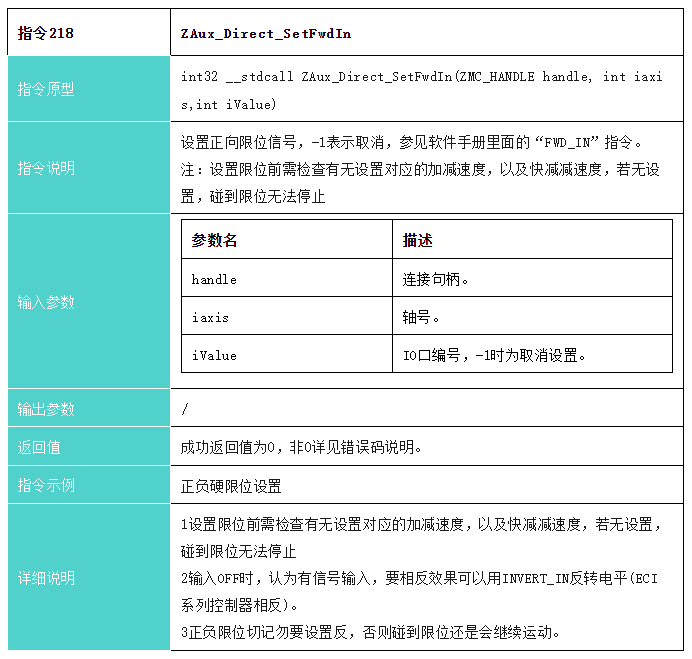
//正硬限位设置
zmcaux.ZAux_Direct_SetFwdIn(g_handle, MoveAxis, DRIVE_Start_IO);
zmcaux.ZAux_Direct_SetInvertIn(g_handle, DRIVE_Start_IO, 1);
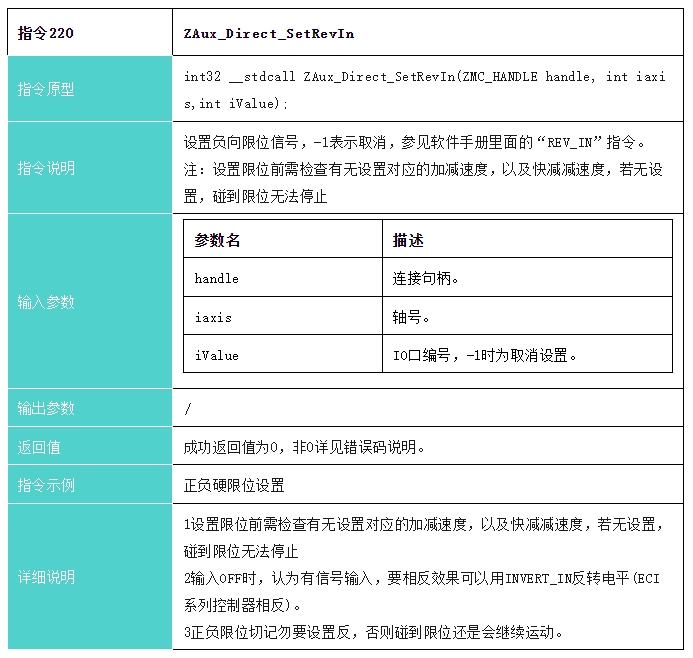
//负硬限位设置
zmcaux.ZAux_Direct_SetRevIn(g_handle, MoveAxis, DRIVE_Start_IO + 1);
zmcaux.ZAux_Direct_SetInvertIn(g_handle, DRIVE_Start_IO + 1, 1);
MessageBox.Show("当前轴配置成功!", "提示");
}
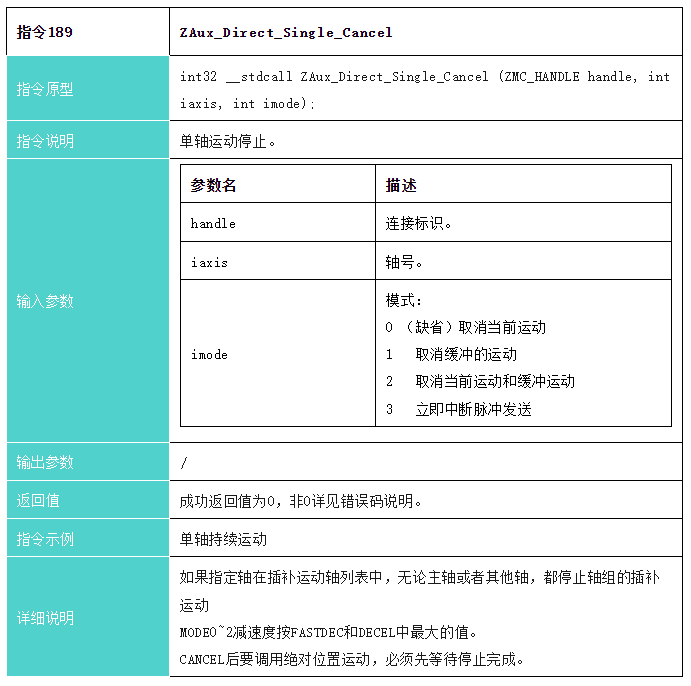
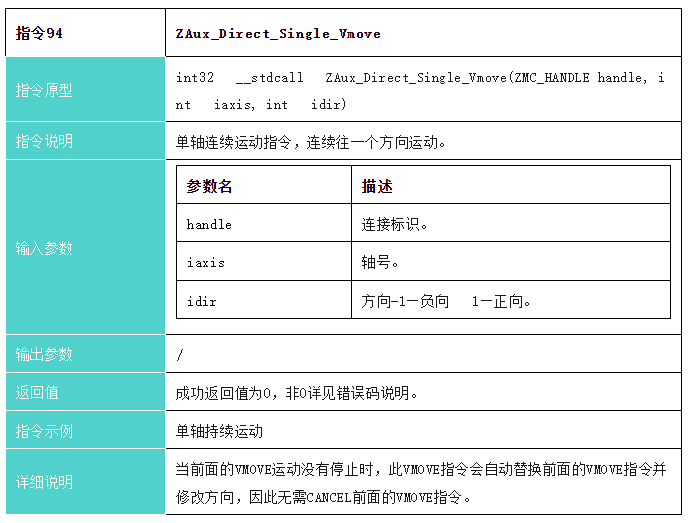
5、通过按钮控件的MouseDown(鼠标在组件上方并按下时发生)事件来触发单轴持续运动;MouseUp(鼠标在组件上方并松开时发生)事件来触发单轴运动的停止。interwetten与威廉的赔率体系 手动运动的调试过程。
//正向
private void Fwd_Button_MouseDown(object sender, MouseEventArgs e)
{
zmcaux.ZAux_Direct_Single_Vmove(g_handle, MoveAxis, 1);
}
private void Fwd_Button_MouseUp(object sender, MouseEventArgs e)
{
zmcaux.ZAux_Direct_Single_Cancel(g_handle, MoveAxis, 2);
}
//负向
private void Rev_Button_MouseDown(object sender, MouseEventArgs e)
{
zmcaux.ZAux_Direct_Single_Vmove(g_handle, MoveAxis, -1);
}
private void Rev_Button_MouseUp(object sender, MouseEventArgs e)
{
zmcaux.ZAux_Direct_Single_Cancel(g_handle, MoveAxis, 2);
}
6、通过textbook控件的TextChanged(空间上text属性更改时发生)事件来修改运动过程中轴的基本参数,定时器会获取接收。
//脉冲当量变化
private void Units_Value_TextChanged(object sender, EventArgs e)
{
zmcaux.ZAux_Direct_SetUnits(g_handle, MoveAxis, Convert.ToSingle(Units_Value.Text));
}
//轴速度变化
private void Speed_Value_TextChanged(object sender, EventArgs e)
{
zmcaux.ZAux_Direct_SetSpeed(g_handle, MoveAxis, Convert.ToSingle(Speed_Value.Text));
}
//加速度变化
private void Accel_Value_TextChanged(object sender, EventArgs e)
{
zmcaux.ZAux_Direct_SetAccel(g_handle, MoveAxis, Convert.ToSingle(Accel_Value.Text));
}
//减速度变化
private void Decel_Value_TextChanged(object sender, EventArgs e)
{
zmcaux.ZAux_Direct_SetDecel(g_handle, MoveAxis, Convert.ToSingle(Decel_Value.Text));
}
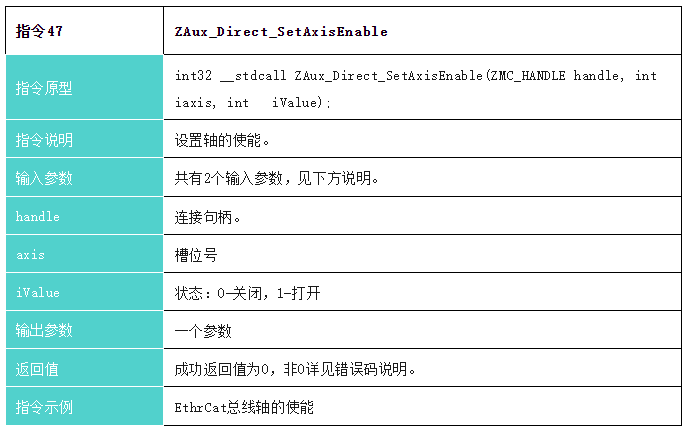
7、通过按钮控件,与文本信息比对,触发总线轴的使能切换功能。
private void Enable_Button_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未链接到控制器!", "提示");
return;
}
int ret = 0;
if (Enable_Value.Text == "ON")
{
ret = zmcaux.ZAux_Direct_SetAxisEnable(g_handle, MoveAxis, 0);
}
else
{
ret = zmcaux.ZAux_Direct_SetAxisEnable(g_handle, MoveAxis, 1);
}
}
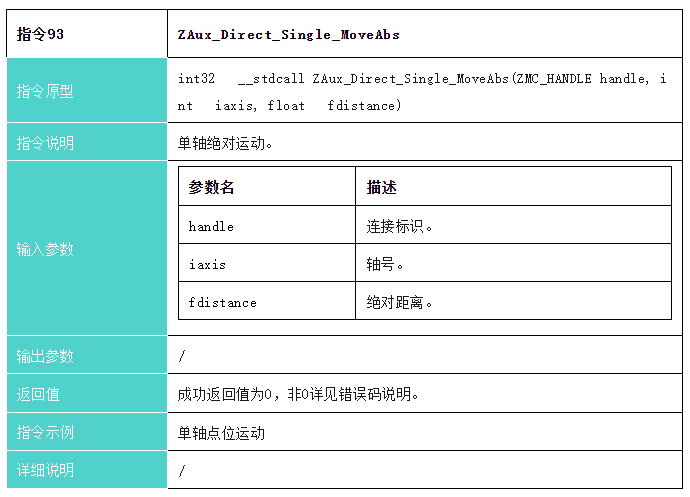
8、通过复选框的切换、单选框的选择实现寸动运动调试的功能。
//寸动方向选择 private void MoveDirection_CheckedChanged(object sender, EventArgs e) { if (MoveDirection.Checked == false) { MoveDirection.Text = "运动方向: 正"; dir = 1; } else { MoveDirection.Text = "运动方向: 负"; dir = -1; } } //寸动启动 private void InchStart_Button_Click(object sender, EventArgs e) { if (g_handle == (IntPtr)0) { MessageBox.Show("未链接到控制器!", "提示"); } else { //绝对运动 if (MoveAbs_RadBtn.Checked == true) { zmcaux.ZAux_Direct_Single_MoveAbs(g_handle, MoveAxis, dir * Convert.ToSingle(InchDistance_Value.Text)); } //相对运动 if (MoveOpp_RadBtn.Checked == true) { zmcaux.ZAux_Direct_Single_Move(g_handle, MoveAxis, dir * Convert.ToSingle(InchDistance_Value.Text)); } } }
9、通过定时器的刷新,对轴参数的接收,初始化信息,IO监控等信息进行实时的反馈。
//轴参数更新
private void Update_AxisPara()
{
int CurAxisAtype = 0;
int CurAxisIdle = 0;
int CurAxisStatus = 0;
double CurAxisFSLimit = 0;
double CurAxisRSLimit = 0;
double CurAxisDpos = 0;
double CurAxisMpos = 0;
Axis_Para[0] = Convert.ToSingle(Units_Value.Text);
Axis_Para[1] = Convert.ToSingle(Speed_Value.Text);
Axis_Para[2] = Convert.ToSingle(Accel_Value.Text);
Axis_Para[3] = Convert.ToSingle(Decel_Value.Text);
MoveAxis = Convert.ToInt32(AxisNum_Value.Text);
zmcaux.ZAux_Direct_GetAtype(g_handle, MoveAxis, ref CurAxisAtype);
zmcaux.ZAux_Direct_GetDpos(g_handle, MoveAxis, ref CurAxisDpos);
zmcaux.ZAux_Direct_GetMpos(g_handle, MoveAxis, ref CurAxisMpos);
zmcaux.ZAux_Direct_GetIfIdle(g_handle, MoveAxis, ref CurAxisIdle);
zmcaux.ZAux_Direct_GetAxisStatus(g_handle, MoveAxis, ref CurAxisStatus);
zmcaux.ZAux_Direct_GetUnits(g_handle, MoveAxis, ref Axis_Para[0]);
zmcaux.ZAux_Direct_GetSpeed(g_handle, MoveAxis, ref Axis_Para[1]);
zmcaux.ZAux_Direct_GetAccel(g_handle, MoveAxis, ref Axis_Para[2]);
zmcaux.ZAux_Direct_GetDecel(g_handle, MoveAxis, ref Axis_Para[3]);
zmcaux.ZAux_Direct_GetFsLimit(g_handle, MoveAxis, ref CurAxisFSLimit);
zmcaux.ZAux_Direct_GetRsLimit(g_handle, MoveAxis, ref CurAxisRSLimit);
if (EcatInitFlag == true) //总线初始化完成后实时显示状态信息
{
AxisAtype_Label.Text = "轴 类 型: " + CurAxisAtype;
AxisDpos_Label.Text = "DPOS位置: " + CurAxisDpos;
AxisMpos_Label.Text = "MPOS位置: " + CurAxisMpos;
AxisIdle_Label.Text = "运动状态: " + CurAxisIdle;
AxisStatus_Label.Text = "轴 状 态: " + CurAxisStatus;
}
}
10、通过按钮控件的的click事件触发断开链接。
private void Local_DisConnect_Button_Click(object sender, EventArgs e)
{
timer1.Enabled = false;
zmcaux.ZAux_Close(g_handle);
g_handle = (IntPtr)0;
Local_DisConnect_Button.BackColor = Color.White;
this.Text = "未连接";
}
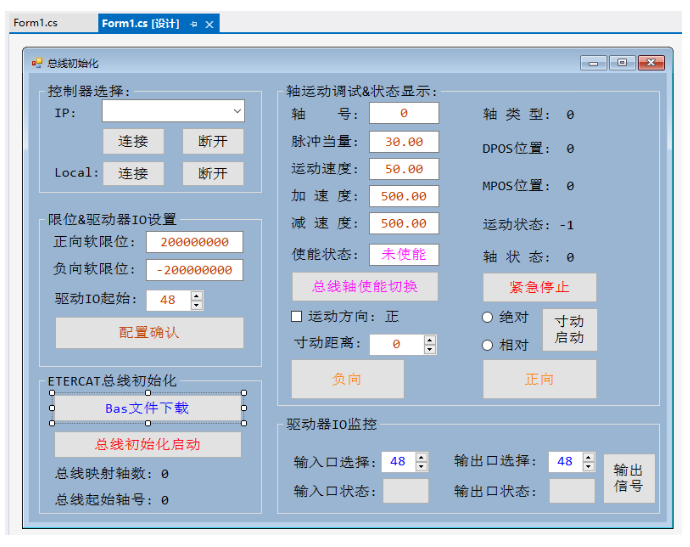
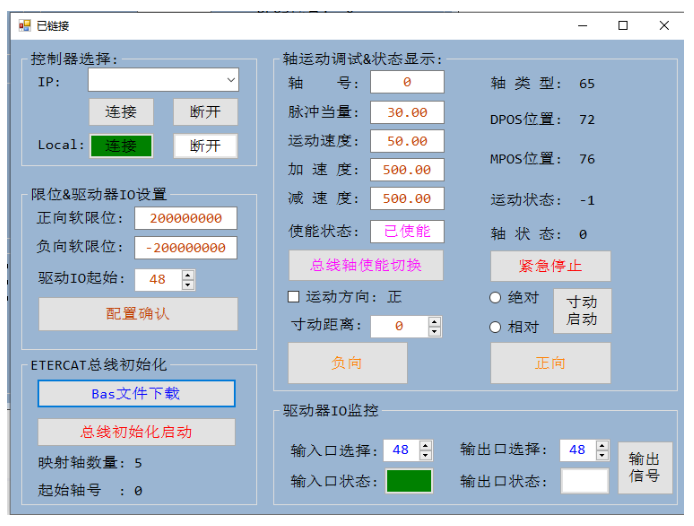
四、运行效果
运行主界面如下:
视频讲解:
http://www.zmotion.com.cn/support_info_284.html
附录:basic初始化程序通用模板
global CONST BUS_TYPE = 0 '总线类型。用于上位机区分当前模式
global CONST MAX_AXISNUM = 32 '最大轴数
global CONST Bus_Slot = 0 '槽位号0
global CONST Bus_AxisStart = 0 '总线轴起始轴号
global Bus_InitStatus '总线初始化完成状态
Bus_InitStatus = -1
global Bus_TotalAxisnum '检查扫描的总轴数
delay(3000) '延时3S等待驱动器上电
'**********************初始化ECAT总线**********************
Ecat_Init()
global sub Ecat_Init()
for i=0 to MAX_AXISNUM - 1 '初始化还原轴类型
AXIS_ENABLE(i) = 0
atype(i)=0
next
Bus_InitStatus = -1
Bus_TotalAxisnum = 0
SLOT_STOP(Bus_Slot)
delay(200)
slot_scan(Bus_Slot) '开始扫描
if return then
?"总线扫描成功","连接设备数:"NODE_COUNT(Bus_Slot)
?"开始映射轴号"
endif
for i=0 to NODE_COUNT(Bus_Slot)-1 '遍历总线下所有从站节点
if NODE_AXIS_COUNT(Bus_Slot,i) < >0 then '判断当前节点是否有电机
for j=0 to NODE_AXIS_COUNT(Bus_Slot,i)-1
AXIS_ADDRESS(Bus_AxisStart+i)=Bus_TotalAxisnum+1 '映射轴号
ATYPE(Bus_AxisStart+i)=65 '设置控制模式
DRIVE_PROFILE(Bus_AxisStart+i)= 4 '设置PROFILE功能
disable_group(Bus_AxisStart+i) '每轴单独分组
DRIVE_IO(Bus_AxisStart+i) = 128 + (Bus_AxisStart+i)*16
REV_IN(Bus_AxisStart+i) = 128 + (Bus_AxisStart+i)*16
FWD_IN(Bus_AxisStart+i) = 129 + (Bus_AxisStart+i)*16
DATUM_IN(Bus_AxisStart+i) = 130 + (Bus_AxisStart+i)*16
INVERT_IN(128 + (Bus_AxisStart+i)*16,ON)
INVERT_IN(129 + (Bus_AxisStart+i)*16,ON)
INVERT_IN(130 + (Bus_AxisStart+i)*16,ON)
Bus_TotalAxisnum=Bus_TotalAxisnum+1 '总轴数+1
next
endif
next
?"轴号映射完成","连接总轴数:"Bus_TotalAxisnum
wa 2000
SLOT_START(Bus_Slot) '启动总线
if return then
?"总线开启成功"
?"开始清除驱动器错误(根据驱动器数据字典设置)"
for i= Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1
DRIVE_CONTROLWORD(i)=128 '根据驱动器数据字典
wa 100
DRIVE_CONTROLWORD(i)=6
wa 100
DRIVE_CONTROLWORD(i)=15
wa 100
next
?"驱动器错误清除完成"
wa 100
?"清除控制器错误"
datum(0)
DRIVE_CLEAR(0)
?"控制器错误清除完成"
wa 100
?"轴使能准备"
for i= Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1
base(i)
AXIS_ENABLE=1
next
wdog=1 '使能总开关
Bus_InitStatus = 1
?"轴使能完成"
else
?"总线开启失败"
Bus_InitStatus = 0
endif
?"总线扫描失败"
Bus_InitStatus = 0
end sub
本次,正运动威廉希尔官方网站 EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动威廉希尔官方网站 销售工程师:400-089-8936。
本文由正运动威廉希尔官方网站 原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动威廉希尔官方网站 所有,如有转载请注明文章来源。
正运动威廉希尔官方网站 专注于运动控制威廉希尔官方网站 研究和通用运动控制软硬件产品的研发,是国家级高新威廉希尔官方网站 企业。正运动威廉希尔官方网站 汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础威廉希尔官方网站 的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心威廉希尔官方网站 和实时工控软件平台威廉希尔官方网站 的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等。
审核编辑 黄宇
-
总线
+关注
关注
10文章
2878浏览量
88056 -
上位机
+关注
关注
27文章
941浏览量
54792 -
运动控制卡
+关注
关注
7文章
111浏览量
15452 -
ethercat
+关注
关注
18文章
686浏览量
38677
发布评论请先 登录
相关推荐
EtherCAT运动控制卡XPCIE1032H上位机开发(一):驱动安装

单轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(七)

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十三)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十四)


EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#人工智能 #运动控制卡# 正运动威廉希尔官方网站

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(三):EtherCAT总线模式切换

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(五):通过RTSys进行调试与诊断
不止10倍提速!PCIe EtherCAT实时运动控制卡XPCIE1032H 等您评测!

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接
EtherCAT超高速实时运动控制卡(二):EtherCAT总线初始化

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发





 工商网监
工商网监
评论