 一台完整的工业机器人究竟由哪些部分组成呢?
一台完整的工业机器人究竟由哪些部分组成呢?
工业机器人在各种行业中发挥着关键作用,提高生产效率,降低成本,提高产品质量,甚至改变整个行业的生产方式。那么,一台完整的工业机器人究竟由哪些部分组成呢?本文将详细介绍工业机器人的各个组成部分及其功能,以帮助您更好地了解这一关键威廉希尔官方网站 。
1. 机械结构
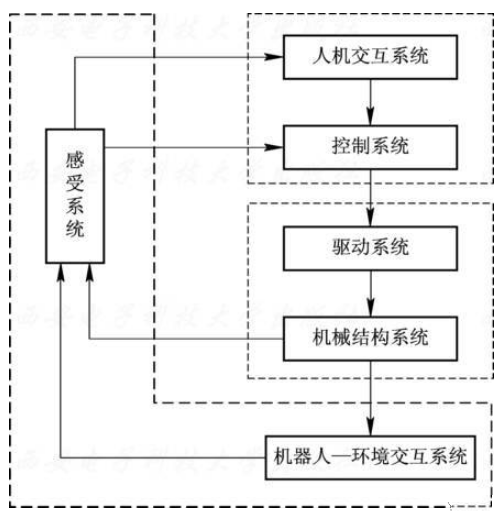
工业机器人的基本结构包括机身、臂部、手腕和指部。这些部件共同构成了机器人的运动系统,使其能够在三维空间中进行精确的定位和运动。
- 机身:机身是机器人的主体部分,通常由高强度钢材制成,用于支撑其他部件并提供内部空间,以容纳各种传感器、控制器和其他设备。
- 臂部:臂部是机器人执行任务的主要部分,通常由关节驱动,实现多自由度的运动。根据应用场景的不同,臂部可以采用固定轴或可伸缩轴的设计。
- 手腕:手腕是机器人末端执行器与工件接触的部分,通常由一系列关节和连杆组成,实现灵活的抓取、放置和操作功能。
- 指部:指部是机器人末端执行器的一部分,通常包括各种工具和夹具,用于完成特定的操作任务。
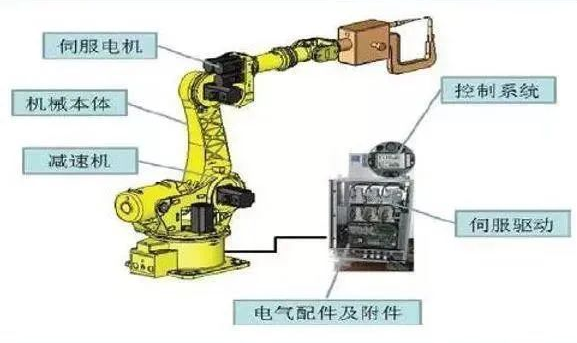
2. 控制系统
工业机器人的控制系统是其核心部分,负责接收来自传感器的信息,处理这些信息,并发送控制指令以驱动机器人的运动。控制系统通常包括以下组件:
- 控制器:控制器是工业机器人的大脑,负责处理各种传感器的信号并生成相应的控制指令。常见的控制器类型包括PLC(可编程逻辑控制器)、DCS(分布式控制系统)和IPC(智能控制系统)。
- 驱动器:驱动器是控制器与电机之间的接口,负责将控制器发出的控制指令转换为电机的实际运动。根据应用需求的不同,驱动器可以分为步进电机驱动器、伺服电机驱动器和直线电机驱动器等。
- 编程界面:编程界面是用户与机器人系统进行交互的工具,通常包括计算机软件、触摸屏或专用的操作面板。通过编程界面,用户可以设置机器人的运动参数、监控其运行状态并对故障进行诊断和处理。
3. 传感器
工业机器人需要依靠各种传感器来获取周围环境的信息,以便进行正确的定位、导航和避障等任务。常见的传感器类型包括:
- 视觉传感器:视觉传感器用于捕捉目标物体的图像或视频数据,如摄像头、激光雷达等。通过分析这些数据,机器人可以实现物体识别、定位和跟踪等功能。
- 力/扭矩传感器:力/扭矩传感器用于测量机器人所受到的外力和扭矩,如压力传感器、扭矩传感器等。这些数据对于机器人的运动控制和负载监测至关重要。
- 接近/距离传感器:接近/距离传感器用于测量机器人与周围物体的距离,以确保安全的运动范围。常见的接近/距离传感器有超声波传感器、红外传感器等。
- 编码器:编码器是一种用于测量旋转角度和位置信息的传感器,如光电编码器、磁性编码器等。通过对这些数据的处理,机器人可以实现精确的位置控制和轨迹规划。
4. 通信接口
为了实现与其他设备的协同工作和信息共享,工业机器人通常需要具备一定的通信能力。通信接口可以连接机器人与其他设备(如生产线上的其他机器人、物料搬运设备等)以及上层管理系统(如ERP、MES等),实现数据交换和远程控制等功能。常见的通信接口类型包括:
- 以太网接口:以太网接口是一种基于IP协议的通用网络接口,广泛应用于工业自动化领域。通过以太网接口,机器人可以实现与其他设备的高速数据传输和实时监控。
- PROFIBUS接口:PROFIBUS是一种国际标准的现场总线协议,广泛应用于工业自动化领域。PROFIBUS接口可以实现不同设备之间快速、可靠的数据交换和协同控制。
- USB接口:USB接口是一种通用的串行通信接口,可用于连接键盘、鼠标等输入设备以及打印机、存储设备等输出设备。通过USB接口,机器人可以实现与用户的交互操作和信息传输。
综上所述,一台完整的工业机器人由机械结构、控制系统、传感器和通信接口等多个部分组成。这些部件共同协作,使机器人能够在复杂的工业生产环境中完成各种高精度、高速度的任务。随着威廉希尔官方网站
的不断发展和应用需求的不断扩大,工业机器人将继续发挥其在现代制造业中的重要作用。
审核编辑:刘清
-
机器人
+关注
关注
211文章
28405浏览量
207015 -
工业机器人
+关注
关注
91文章
3363浏览量
92638
原文标题:工业机器人各个组成部分及其功能
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

挂轨巡检机器人组成部分有哪些?
医疗机器人有哪些基本组成_医疗机器人有哪些功能
焊接专机是由几部分组成的








 工商网监
工商网监
评论