 前轮、后轮反馈控制算法介绍
前轮、后轮反馈控制算法介绍
后轮反馈控制算法
后轮反馈式(Rear wheel feedback)是利用后轮中心的路径跟踪偏差量来进行转向控制量计算的方法
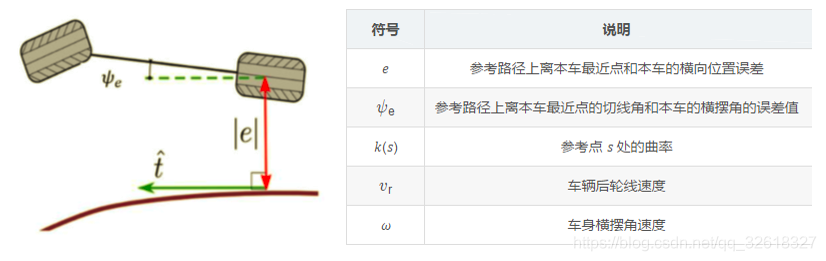
Frenet坐标系使用道路的中心线作为参考线,使用参考线的切线向量和法线向量建立坐标系,那么基于参考线的位置,就可以使用纵向距离和横向距离来描述任意位置。
同时纵向和横向的速度、加速度、加加速度等信息也更便于计算。

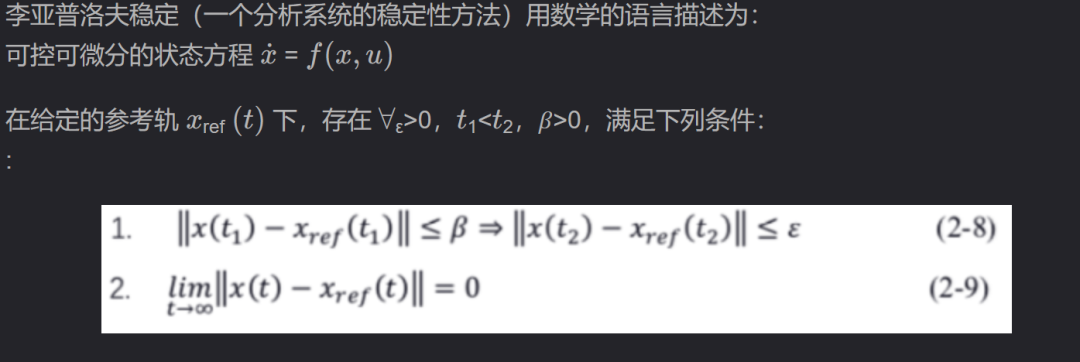
李亚普洛夫稳定性理论是从能量的观点出发的,系统的能量随着时间的推移不断变化(增加or减少),在有限时间内,系统趋于稳定,能量不再变化。
此时,系统的k+1时刻的能量减去k时刻的能量是《0的,即V(k+1)-V(k)《0,V代表能量函数。
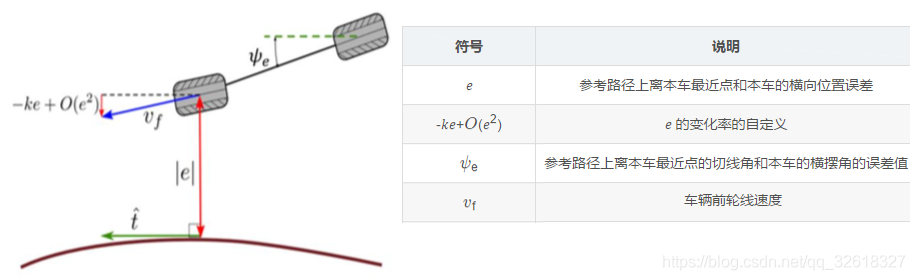
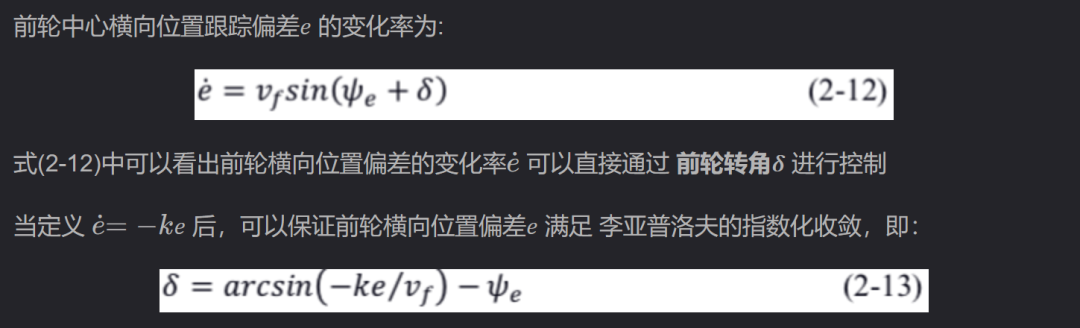
2.4 前轮反馈控制算法
前轮反馈控制(Front wheel feedback)又称 Stanley控制,其核心思想是利用前轮中心的路径跟踪偏差量对方向盘转向控制量进行计算。
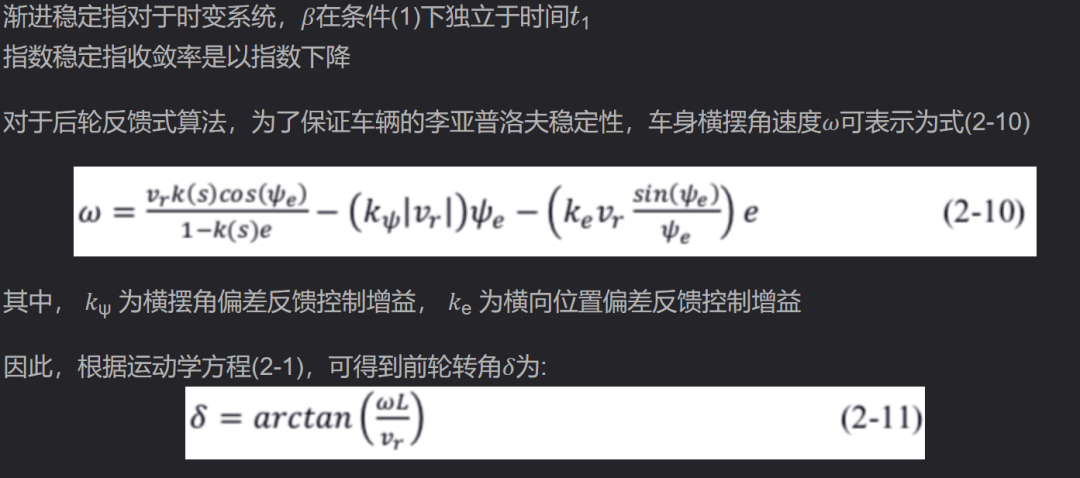
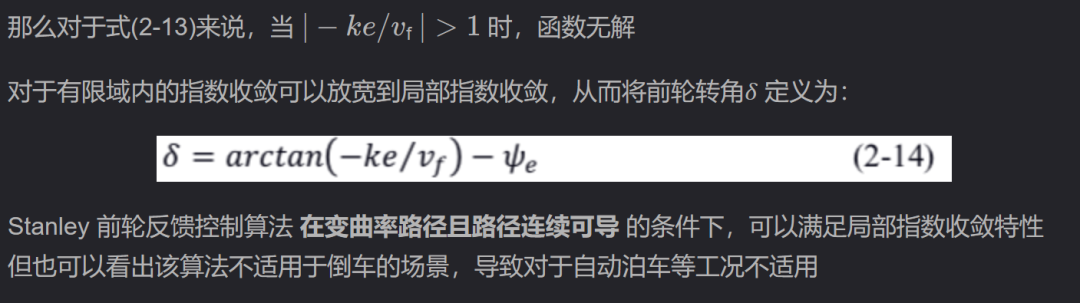
李亚普洛夫指数:在相空间中相互靠近的两条轨线随着时间的推移,按指数分离或聚合的平均变化速率。
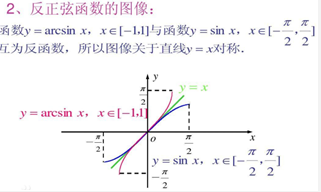
关于 arcsin函数:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制算法
+关注
关注
4文章
166浏览量
21722 -
反馈控制
+关注
关注
0文章
61浏览量
20910 -
无人驾驶
+关注
关注
98文章
4059浏览量
120503
发布评论请先 登录
相关推荐
时变移动通信系统功率控制算法与仿真研究
范围以及系统的容量。功率控制的目标是能够根据移动环境的变化快速调整发射功率的大小,使得既能够保证一定的通信质量有不对其他用户产生太大干扰。功率控制算法的好坏对系统性能有着直接的影响。本文简要介
发表于 04-24 09:24
PID算法有点不懂,,反馈的控制量这么用正确吗?
问题!!!---------------------------------------下面是一些关键性的代码附件有源程序这是PID算法部分PID处理后的控制量反馈到rout处,在这里执行,分别是电机速度偏差大于0和小于0的情况
发表于 08-04 17:26
倾角传感器在汽车四轮定位的特征?
(角)和前轮前束四个内容。对两个后轮来说也同样存在与后轴之间安装的相对位置,称后轮定位。后轮定位包括车轮外倾(角)和逐个后轮前束。这样
发表于 03-24 06:13
如何利用单片机去设计一种智能车仿真系统呢
弯按键 小车左转弯左前轮左后轮速度(两端电压)大概30左右右前轮右后轮速度(两端电压)大概50左右按下右转弯按键 小车右转弯左前轮左
发表于 02-23 06:08
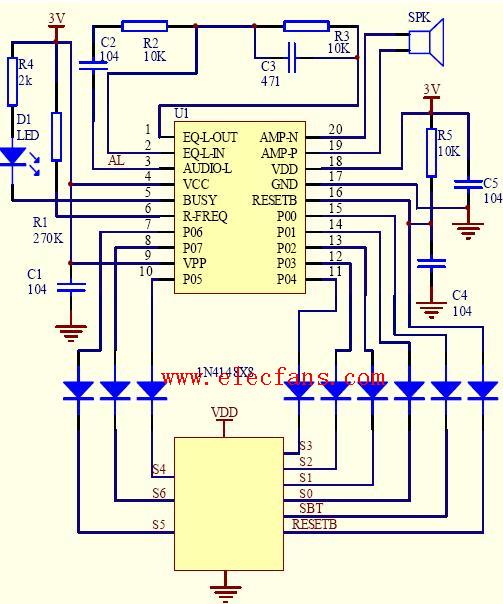
汽车报警器电路图
汽车报警器电路图
主要功能:当系统检测到汽车出现各种故障时进行语音提示报警。语音:左前轮;右前轮;左后轮;右后轮;胎压过低;胎压过高;请换电池;叮咚
发表于 05-23 10:19
•4122次阅读
四轮转向控制(4WS),四轮转向控制(4WS)是什么意思
四轮转向控制(4WS),四轮转向控制(4WS)是什么意思
四轮转向系统车辆转向时,后轮的旋转方向与前轮相反,以时转弯半径尽可能小并改善操纵特
发表于 03-11 17:43
•5536次阅读
智能小车单片机程序及流程
设计分为5 个模块:前轮 PWM 驱动电路、后轮PWM 驱动电路、轨迹探测模块、障碍物探测模块、光源探测模块。前轮PWM 驱动电路用于转向控制;后轮
发表于 07-12 17:50
•2168次下载

基于单片机智能车仿真系统设计-毕设课设
下左转弯按键 小车左转弯 左前轮左后轮速度(两端电压)大概30左右 右前轮右后轮速度(两端电压)大概50左右按下右转弯按键 小车右转弯 左
发表于 12-29 19:52
•0次下载

阿克曼小车仿真设计运动控制方案
阿克曼小车是一款经典的车模,小车模型后轮是通过电机直驱,前轮通过舵机控制前轮转向角,前轮部分则是在模型中添加一个竖直的关节,使
发表于 03-13 09:59
•475次阅读





 工商网监
工商网监
评论