 基于车辆运动学模型的控制方法
基于车辆运动学模型的控制方法


声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
车辆
+关注
关注
0文章
82浏览量
15136 -
运动控制
+关注
关注
4文章
581浏览量
32869 -
无人驾驶
+关注
关注
98文章
4059浏览量
120498
发布评论请先 登录
相关推荐
LabVIEW的六轴工业机器人运动控制系统
。LabVIEW的可视化编程环境和强大的数据处理能力,使得复杂的运动学算法和轨迹规划得以顺利实现,显著提高了工业机器人的控制精度和效率。
这是LabVIEW的一个功能介绍,更多的使用方法与开发案例,欢迎登录官网,了解更多信息
发表于 12-21 20:03
基于FPGA和模糊控制的模型车运动学仿真
模型车运动学仿真系统是集硬件、软件于一身的完整且复杂的系统,它在汽车驾驶模拟训练领域的市场前景非常广阔。但是,采用传统的数学建模方法,很难得到精确而又简单的数
发表于 09-11 16:23
•13次下载
基于回转变换张量的6R机器人运动学研究
在牧野坐标系下建立了六自由度喷涂机器人的运动学模型,采用回转变换张量法求出了该机器人的正逆运动学解析表达式。算法在VS.NET 平台上用组件威廉希尔官方网站
实现并仿真,仿真结果验证
发表于 12-18 12:02
•15次下载

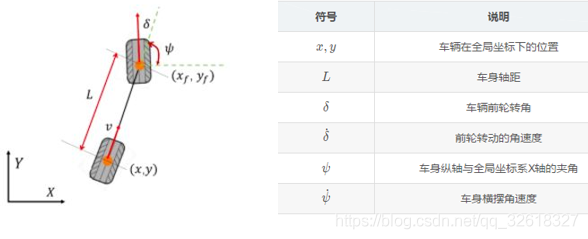
自动驾驶车辆控制(车辆运动学模型)
本文应配合b站up主“ 忠厚老实的老王 ”的 自动驾驶控制算法 系列视频食用。文章目录1. 两个车辆运动学模型 1.1 三个坐标系 1.2符号定义 1.3
发表于 06-07 11:53
•0次下载

开源七轴myArm协作机械臂正逆运动学威廉希尔官方网站 讲解
引言: 在本文中,我们将深入探讨机器人学的两个核心概念:正运动学和逆运动学。这两个概念是理解和控制机械臂运动的基础。通过一个具体的7轴机械臂实例,我们将详细介绍如何计算机械臂的正


基于车辆运动学和动力学模型的横向控制算法
,因此,该方法比较适合应用于低速曲率较小的路径跟踪控制场景中。 基于运动学模型的横向控制算法中,Pure Pursuit 和 Stanley
机器人运动学中的非完整约束与运动模型推导
机器人运动学中的运动学约束是指机器人在运动过程中受到的限制,包括位置、姿态、速度和加速度等因素。这些约束会对机器人的自由度产生影响,从而影响机器人的运动和






 工商网监
工商网监
评论