 ROS的基本概念和系统架构 ROS的安装和简单测试
ROS的基本概念和系统架构 ROS的安装和简单测试
作者:李慢慢
来源:微信公众号【车路漫漫】
前言:一直都觉得ROS很神秘,到底是个操作系统,仅凭称呼就让我望而却步了。但ROS和自动驾驶仿真有着千丝万缕的联系,作为仿真软件和智驾算法的数据桥梁,ROS是个绕不开的话题,所以还是得硬着头皮啃一啃。然后用大白话讲给你听,最好再做两个小栗子,那可真是功德无量了。
本文将带领大家了解ROS的核心概念,为后续学习“使用ROS框架为自动驾驶仿真平台集成被控算法”打好基础。
1、ROS简介
ROS(Robot Operating System)是一个适用于机器人的开源框架,这个框架把原本松散的零部件耦合在了一起,为它们提供了通信架构。ROS虽然叫做操作系统,但是它却要安装在如Linux这种操作系统上才能运行。它的作用只是连接真正的操作系统(如Linux)和使用者自己开发的ROS应用程序(比如自动驾驶的感知、规划、决策等模块),所以它也算是个中间件,在基于ROS的应用程序之间建立起了沟通的桥梁。
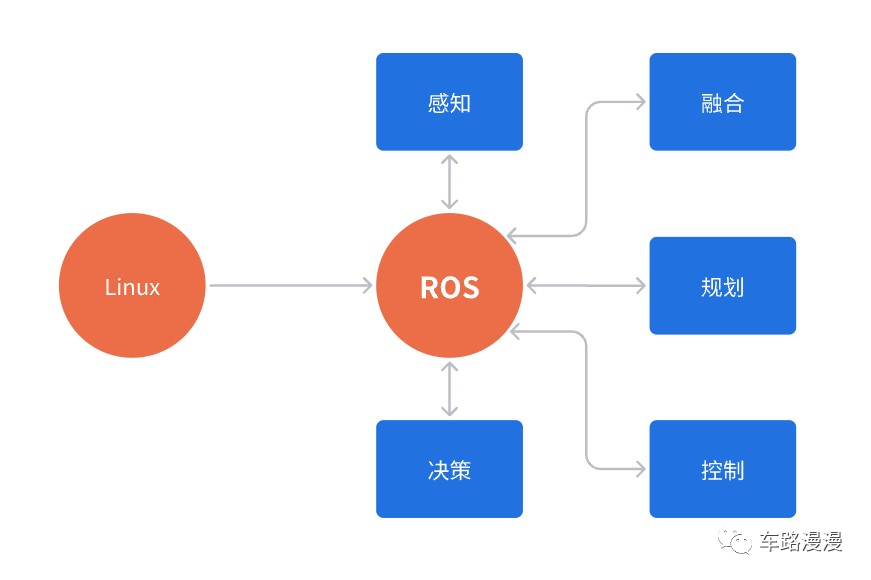
所以,简单点说, ROS就是一个分布式的通信框架,帮助程序进程之间更方便地通信。
为了更形象的理解ROS的应用,这里从别的平台找到一个非常好的科普视频,供大家学习。
2、ROS的核心概念
在正式学习ROS之前,先介绍ROS的几个特性,即元操作系统、分布式通信机制、松耦合软件框架、丰富的开源功能库等,来帮大家建立一些感性的认识。
ROS是一个机器人领域的元操作系统。也就是说,它并不是真正意义上的操作系统,其底层的任务调度、编译、设备驱动等还是由它的原生操作系统Ubuntu/Linux完成。
ROS实际上是运行在Ubuntu/Linux上的亚操作系统 ,或者说软件框架,但提供硬件抽象、函数调用、进程管理这些类似操作系统的功能,也提供用于获取、编译、跨平台的函数和工具。
ROS的核心思想就是将机器人的软件功能做成一个个节点,节点之间通过互相发送消息进行沟通。这些节点可以部署在同一台主机上,也可以部署在不同主机上,甚至还可以部署在互联网上。ROS网络通信机制中的主节点(master)负责对网络中各个节点之间的通信过程进行管理调度,同时提供一个用于配置网络中全局参数的服务。
ROS是松耦合软件框架,利用分布式通信机制实现节点间的进程通信。ROS的软件代码以松耦合方式组织,开发过程灵活,管理维护方便。
3、从ROS1到ROS2
2007年,一家名为柳树车库(Willow Garage)的机器人公司发布了ROS,ROS集开源、免费、高复用、低耦合、工具丰富等等诸多优势于一身,一经推出便迅速吸引了大量的开发者、科研人员、硬件供应商的加入,形成了稳定且多样的机器人生态,水到渠成的ROS也成为了机器人领域的主流软件框架并流行至今。
自ROS诞生的十几年来,不管是机器人相关软件、硬件还是ROS社区都发生了天翻地覆的变化,加之原本的ROS存在一些设计上的先天性缺陷,在各种内外因素叠加下,导致老ROS在许多应用场景下都已经显得力不从心了。此背景下,官方于2017正式推出了新一代机器人操作系统——ROS2(区别于老ROS,即ROS1),ROS2基于全新的设计框架,保留了ROS1的优点并改进其缺陷,以适应新时代的新需求。
ROS2是全新一代机器人操作系统,不只是功能增强的ROS1。
所以,我们还是直接就学习ROS2吧。
4、ROS的发行版本
ROS最初是基于Ubuntu系统开发的,ROS的发行版本名称也和Ubuntu采用了同样的规则,即版本名称由两个相同首字母的英文单词组成,版本首字母按字母表递增顺序选取,以下列表为ROS2各不同发布版本的简单说明。
| 发行版 | 发布日期 | 停止维护日期 |
|---|---|---|
| Iron Irwini | 2023 年 5 月 23 日 | 2024 年 11 月 |
| Iron Irwini | 2023 年 5 月 23 日 | 2024 年 11 月 |
| Humble Hawksbill | 2022 年 5 月 23 日 | 2027 年 5 月 |
| Galactic Geochelone | 2021 年 5 月 23 日 | 2022 年 11 月 |
| Foxy Fitzroy | 2020 年 6 月 5 日 | 2023 年 5 月 |
| Eloquent Elusor | 2019 年 11 月 22 日 | 2020 年 11 月 |
| Dashing Diademata | 2019 年 5 月 31 日 | 2021 年 5 月 |
| Crystal Clemmys | 2018 年 12 月 14 日 | 2019 年 12 月 |
| Bouncy Bolson | 2018 年 7 月 2 日 | 2019 年 7 月 |
| Ardent Apalone | 2017 年 12 月 8 日 | 2018 年 12 月 |
5、ROS的学习方法
要想学好以及用好ROS,需要进行大量的实践操作。因此在快速了解ROS的核心概念和编程范式后,就要结合大量的实际项目来深入理解ROS。ROS的学习资源主要有以下几个:
官网:www.ros.org
源码:github.com
Wiki:wiki.ros.org
6、ROS系统架构
由于ROS的架构比较复杂,为了后面容易理解遇到的各种概念,这里先讨论一下ROS的系统架构,好让大家对ROS中的各种概念有全面性把控。按照官方的说法,可以分别从计算图 、 文件系统和开源社区视角来理解ROS架构。
6.1、从计算图视角理解ROS架构
ROS中可执行程序的基本单位叫 节点 (node),节点之间通过消息机制进行通信,这样就组成了一张网状图,也叫计算图,如下图所示。
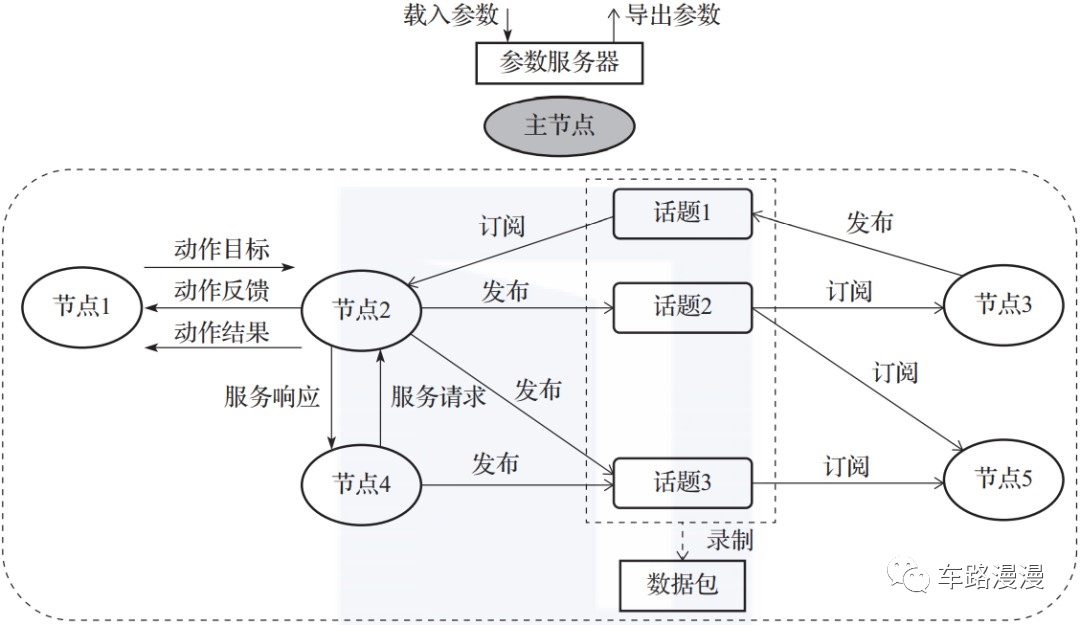
节点是可执行程序,通常也叫进程。
ROS功能包中创建的每个可执行程序在被启动加载到系统进程中后,就是一个ROS节点,如上图中的节点1、节点2、节点3等。
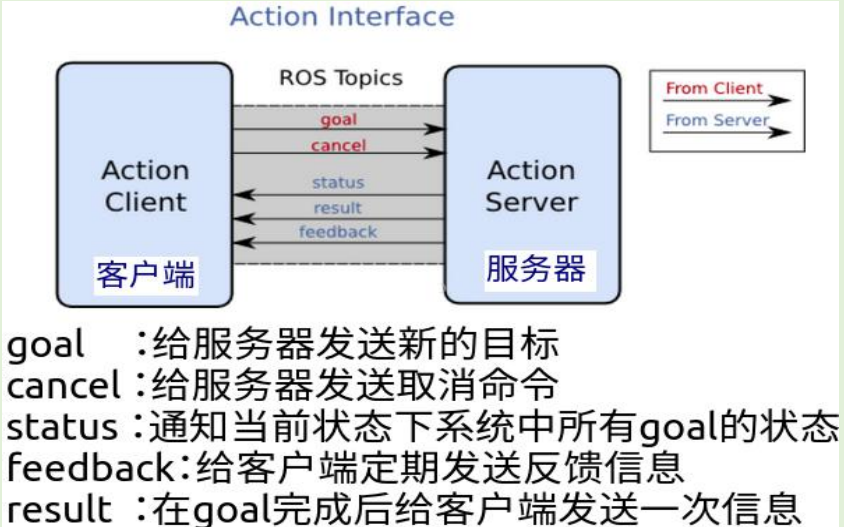
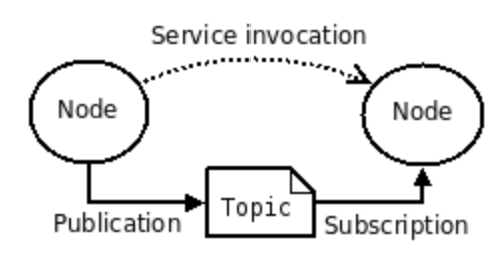
节点之间通过收发消息进行通信,消息收发机制分为 话题 (topic)、 服务 (service)和 动作 (action)三种,如图1-3中的节点2与节点3、节点2与节点5采用话题通信,节点2与节点4采用服务通信,节点1与节点2采用动作通信。计算图中的节点、话题、服务、动作都要有唯一名称作为标识。
ROS利用节点将代码和功能解耦,提高了系统的容错性和可维护性。所以最好让每个节点都具有特定的单一功能,而不是创建一个包罗万象的庞大节点。如果用C++编写节点,需要用到ROS提供的roscpp库;如果用Python编写节点,需要用到ROS提供的rospy库。
主节点负责各个节点之间通信过程的调度管理。因此主节点必须要最先启动,可以通过roscore命令启动。
消息是构成计算图的关键,包括消息机制和消息类型两部分:消息机制有话题、服务和动作三种,每种消息机制中传递的数据都具有特定的数据类型(即消息类型);消息类型可分为话题消息类型、服务消息类型和动作消息类型;
数据包 (rosbag)是ROS中专门用来保存和回放话题中数据的文件,可以将一些难以收集的传感器数据用数据包录制下来,然后反复回放来进行算法性能调试。
参数服务器能够为整个ROS网络中的节点提供便于修改的参数。参数可以认为是节点中可供外部修改的全局变量,有静态参数和动态参数。静态参数一般用于在节点启动时设置节点工作模式;动态参数可以用于在节点运行时动态配置节点或改变节点工作状态,比如电机控制节点里的PID控制参数。
6.2、从文件系统视角理解ROS架构
ROS程序的不同组件要放在不同的文件夹中,这些文件夹根据不同的功能对文件进行组织,这就是ROS的文件系统结构,如下图所示。
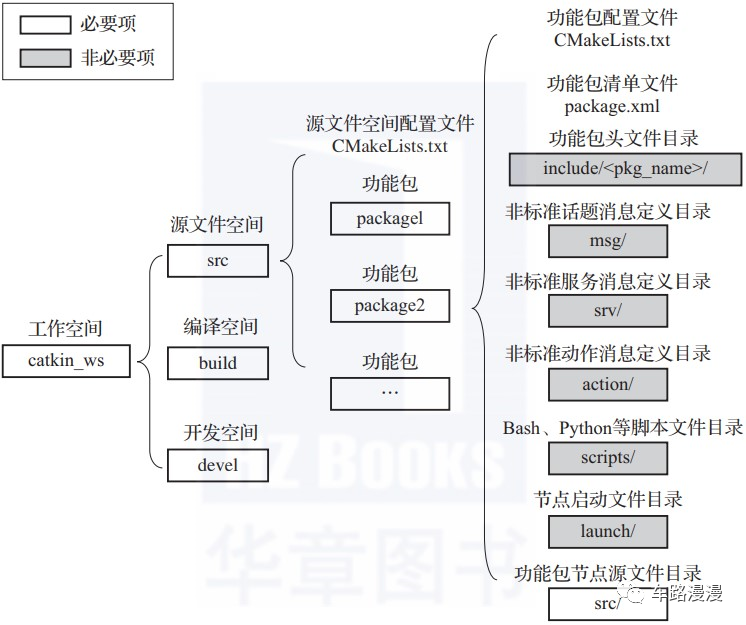
工作空间是一个包含功能包、编译包和编译后可执行文件的文件夹,用户可以根据自己的需要创建多个工作空间,在每个工作空间中开发不同用途的功能包。在上图中,我们创建了一个名为catkin_ws的工作空间,其中包含src、build和devel三个文件夹。
src文件夹 放置各个功能包和配置功能包的CMake配置文件CMakeLists.txt。这里说明一下,由于ROS中的源码采用catkin工具进行编译,而catkin工具又基于CMake威廉希尔官方网站 ,所以我们在src源文件空间和各个功能包中都会见到一个CMake配置文件CMakeLists.txt,这个文件起到配置编译的作用。
build文件夹 放置编译CMake和catkin功能包时产生的缓存、配置、中间文件等。
devel文件夹 放置编译好的可执行程序,这些可执行程序是不需要安装就能直接运行的。一旦功能包源码编译和测试通过后,可以将这些编译好的可执行文件直接导出与其他开发人员分享。
功能包是ROS中软件组织的基本形式,具有创建ROS程序的最小结构和最少内容,它包含ROS节点源码、脚本、配置文件等。
CMakeLists.txt是功能包配置文件,用于编译Cmake功能包编译时的编译配置。
package.xml是功能包清单文件,用xml的标签格式标记该功能包的各类相关信息,比如包的名称、开发者信息、依赖关系等,主要是为了使功能包的安装和分发更容易。
include/
msg、srv和action这三个文件夹分别用于存放非标准话题消息、服务消息和动作消息的定义文件。ROS支持用户自定义消息通信过程中使用的消息类型。这些自定义消息不是必要的,比如程序只使用标准消息类型。
scripts目录存放Bash、Python等脚本文件,为非必要项。
launch目录存放节点的启动文件,*.launch文件用于启动一个或多个节点,在含有多个节点的大型项目中很有用,为非必要项。
src目录存放功能包节点所对应的源代码,一个功能包中可以有多个节点程序来完成不同的功能,每个节点程序都可以单独运行。这里src目录存放的是这些节点程序的源代码,你可以按需创建文件夹和文件来组织源代码,源代码可以用C++、Python等编写。
6.3、从开源社区视角理解ROS架构
ROS是开源软件,各个独立的网络社区分享和贡献软件及教程,形成了强大的ROS开源社区,如下图所示。
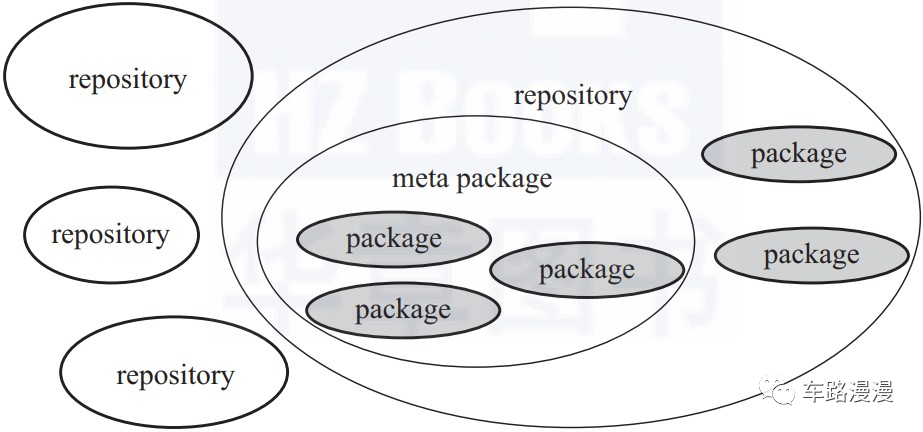
ROS的发展依赖于开源和共享的软件,这些代码由不同的机构共享和发布,比如GitHub源码共享、Ubuntu软件仓库发布、第三方库等。ROS的官方wiki是重要的文档讨论社区,在里面可以很方便地发布与修改相应的文档页面。ROS的answer主页里有大量ROS开发者的提问和回答,对ROS开发中遇到的各种问题的讨论很活跃。
7、ROS的安装及测试
7.1、更新软件源
再开始安装之前,强烈建议大家更新一下系统源(很多基础环境包都将从这里下载并安装)。我这里使用了阿里的源,更新方法如下:
首先需要备份一下原始的源列表文件
sudocp-rf/etc/apt/sources.list/etc/apt/sources.list.bak
然后开始编辑源列表文件:
sudo gedit /etc/apt/sources.list
将sources.list中原本的内容都删除,然后填入以下的内容后保存:
debhttp://mirrors.aliyun.com/ubuntu/jammymainrestricteduniversemultiverse deb-srchttp://mirrors.aliyun.com/ubuntu/jammymainrestricteduniversemultiverse debhttp://mirrors.aliyun.com/ubuntu/jammy-securitymainrestricteduniversemultiverse deb-srchttp://mirrors.aliyun.com/ubuntu/jammy-securitymainrestricteduniversemultiverse debhttp://mirrors.aliyun.com/ubuntu/jammy-updatesmainrestricteduniversemultiverse deb-srchttp://mirrors.aliyun.com/ubuntu/jammy-updatesmainrestricteduniversemultiverse debhttp://mirrors.aliyun.com/ubuntu/jammy-proposedmainrestricteduniversemultiverse deb-srchttp://mirrors.aliyun.com/ubuntu/jammy-proposedmainrestricteduniversemultiverse debhttp://mirrors.aliyun.com/ubuntu/jammy-backportsmainrestricteduniversemultiverse deb-srchttp://mirrors.aliyun.com/ubuntu/jammy-backportsmainrestricteduniversemultiverse
注意:虽然同为阿里源,但也有针对系统的不同源版本,我的Ubuntu系统是jammy版本,阿里源也应该是这个版本。然后根据这个源更新自己系统里的软件:
sudoapt-getupdate sudoapt-getupgrade
这个过程应该要挺久,但运行完毕不应该报错才行,有任务错误请自行度娘。
然后就是根据官方的教程进行ROS2的安装。官方的安装教程链接如下:
https://docs.ros.org/en/humble/Installation.html
7.2、检查操作系统语言环境
在ROS2官方的文档中,安装ROS2之前需要首先检查操作系统语言环境。官方解释:确保你有一个支持UTF - 8的语言环境。如果你处在一个极小的环境(例如一个Docker容器)中,那么这个语言环境可能和POSIX一样是极小的。我们通过以下设定进行检验。
我们可以Ctrl+Alt+T调出终端,输入locale检查是否支持 UTF-8,若不支持,则需要继续执行下边的指令进行设置:
locale#检查是否支持UTF-8 sudoaptupdate&&sudoaptinstalllocales sudolocale-genen_USen_US.UTF-8 sudoupdate-localeLC_ALL=en_US.UTF-8LANG=en_US.UTF-8 exportLANG=en_US.UTF-8 locale#验证设置是否正确
7.3、Ubuntu universe存储库设置与启动
在设置ROS2软件源之前,我们需要首先启动Ubuntu universe存储库,启动Ubuntu universe存储库我们可以通过打开终端通过命令行进行操作。
根据官方文档,我们可以在命令行输入下面的指令来进行Ubuntu universe存储库的启动:
sudoaptinstallsoftware-properties-common sudoadd-apt-repositoryuniverse
7.4、设置ROS软件源
通过下面的命令,首先将ROS 2 apt存储库更新添加到系统,然后通过apt授权ROS 2的GPG密钥:
sudoaptupdate&&sudoaptinstallcurl sudocurl-sSLhttps://raw.githubusercontent.com/ros/rosdistro/master/ros.key-o/usr/share/keyrings/ros-archive-keyring.gpg
然后通过以下指令,将存储库添加到我们的源列表中。
echo"deb[arch=$(dpkg--print-architecture)signed-by=/usr/share/keyrings/ros-archive-keyring.gpg]http://packages.ros.org/ros2/ubuntu$(./etc/os-release&&echo$UBUNTU_CODENAME)main"|sudotee/etc/apt/sources.list.d/ros2.list>/dev/null
7.5、安装ROS2
设置完存储库后,首先通过下面的指令更新apt存储库缓存
sudoaptupdate
由于ROS 2建立在频繁更新的Ubuntu系统上。所以官方建议在安装新的软件包之前确保您的系统是最新的。我们可以通过下面的指令更新升级已安装的软件
sudoaptupgrade
ROS安装版本选择及安装指令:
ROS2桌面版安装(官方推荐),包括:ROS、Rviz、官方demo、教程
sudoaptinstallros-humble-desktop
ROS2基础版安装(裸机),包括:通信库、消息包、命令行工具等,但没有GUI工具。
sudoaptinstallros-humble-ros-base
这里我们安装桌面版ROS2 ,输入以下的安装指令即可:
sudoaptinstallros-humble-desktop
7.6、环境配置
官方文档给出了环境配置的方法,在终端下执行ROS2程序之前,要调用下面的命令进行环境配置,才可正确执行程序
#Replace".bash"withyourshellifyou'renotusingbash #Possiblevaluesare:setup.bash,setup.sh,setup.zsh source/opt/ros/humble/setup.bash
对于官方的环境配置方法,由于每次打开新的终端,都需要进行环境的配置,这降低了开发和测试的效率,为了避免每次打开新的终端都进行环境配置这个问题,我们可以将配置环境指令通过下面的指令写入 ”~/.bashrc“ 文件,那么每次新启动终端时,就不需要在手动配置环境:
#将配置环境指令通过下面的指令写入”~/.bashrc“文件 echo"source/opt/ros/humble/setup.bash">>~/.bashrc #查看”~/.bashrc“文件 sudogedit~/.bashrc
至此,我们完成了ROS2的安装与环境配置,接下来我们进行ROS2的环境测试。
8、ROS操作系统的使用案例
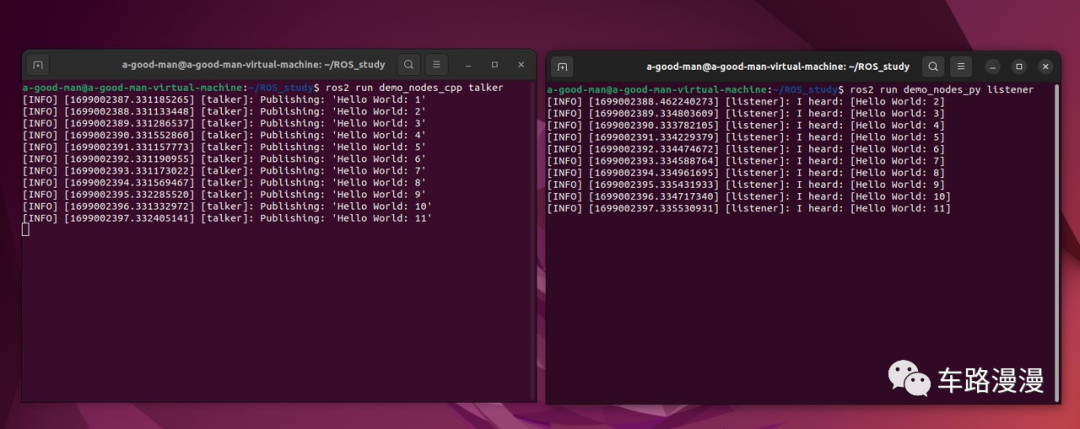
8.1、案例1-talker和listener
我们需要以此打开两个终端窗口,各输入以下一条指令。
启动第一个终端,通过以下命令启动一个数据的发布者节点:
ros2rundemo_nodes_cpptalker
启动第二个终端,通过以下命令启动一个数据的订阅者节点:
ros2rundemo_nodes_pylistener
如果“Hello World”字符串在两个终端中正常传输,说明通信系统没有问题。如下所示:
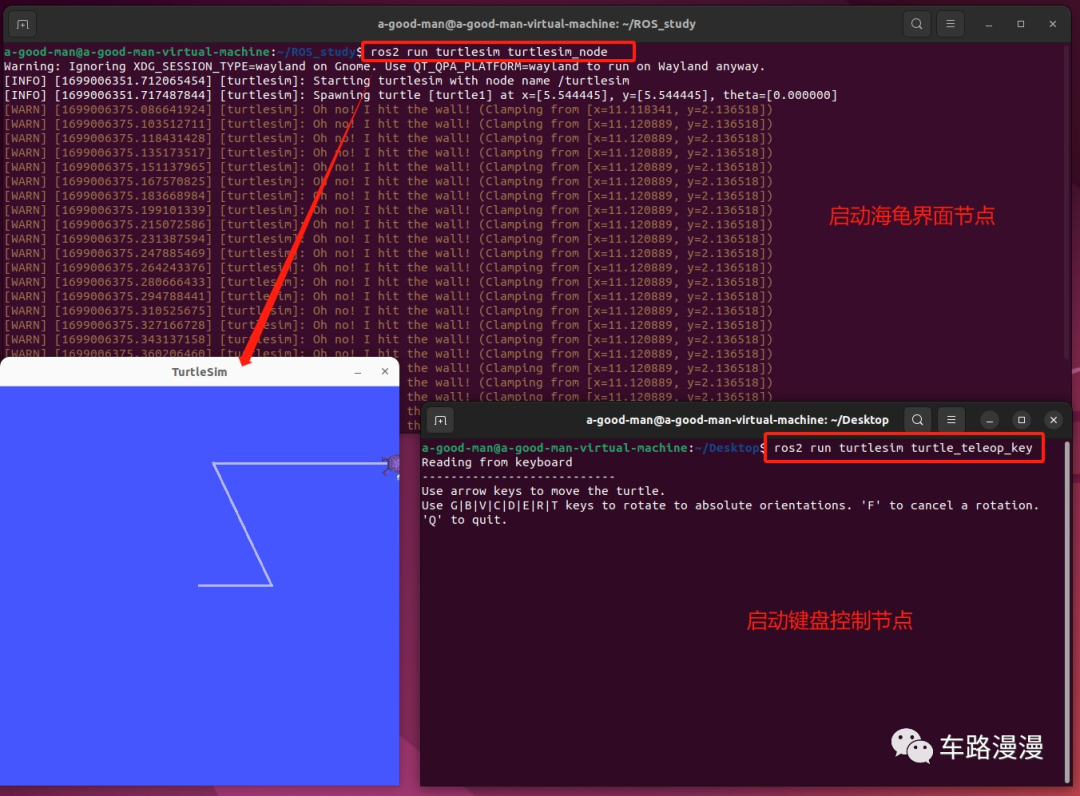
8.2、案例2-小乌龟
在我们安装的ROS2桌面完整版中,内置了一些案例,我们可以运行这些案例来测试ROS2的安装与配置是否正常。在这里,我们选用ROS2经典的小乌龟案例来进行演示,实操如下:
使用快捷键‘Ctrll+Alt+T’分别打开两个终端,并分别输入下面两个命令:
#启动第一个终端 #启动乌龟GUI节点界面,乌龟可以在界面中运动 ros2runturtlesimturtlesim_node
#启动第二个终端 #启动键盘控制节点,可以通过键盘控制乌龟运动 ros2runturtlesimturtle_teleop_key
运行效果的界面如下:
9、结语
本文初步完成了ROS基本概念的学习,并完成了安装和简单测试。后续将继续基于ROS和Carla,完成自定义节点的设置,并集成其他平台的开源自动驾驶算法,以搭建更为完善的自动驾驶仿真测试平台,欢迎大家持续关注。
文章来源:车路漫漫
-
机器人
+关注
关注
211文章
28414浏览量
207054 -
Linux
+关注
关注
87文章
11303浏览量
209441 -
操作系统
+关注
关注
37文章
6818浏览量
123326 -
自动驾驶
+关注
关注
784文章
13806浏览量
166439 -
ROS
+关注
关注
1文章
278浏览量
17007
原文标题:9、结语
文章出处:【微信号:robotmagazine,微信公众号:机器人威廉希尔官方网站 与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
NXP的芯片安装Linux和ROS 是否可以?
超详细 ROS安装教程
搭建ARM+ROS的硬件载体之ROS的移植及测试方法
ROS教程之ROS机器人操作系统基础知识概述资料免费下载
ROS学习笔记之ROS基本概念
ROS1的通信架构的基础通信方式及相关概念

实现ARM+ROS(机器人操作系统)之运行ROS!

ROS2中自带例程测试

在TogetherROS中如何安装ROS2功能包






 工商网监
工商网监
评论