 有源功率因数校正(APFC)电路拓扑方法以及仿真设计
有源功率因数校正(APFC)电路拓扑方法以及仿真设计
1. APFC的系统构成
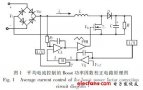
按照要求,可将系统划分为滞环电流控制、Boost、PI控制三个主要部分,系统的整体框架如图所示,
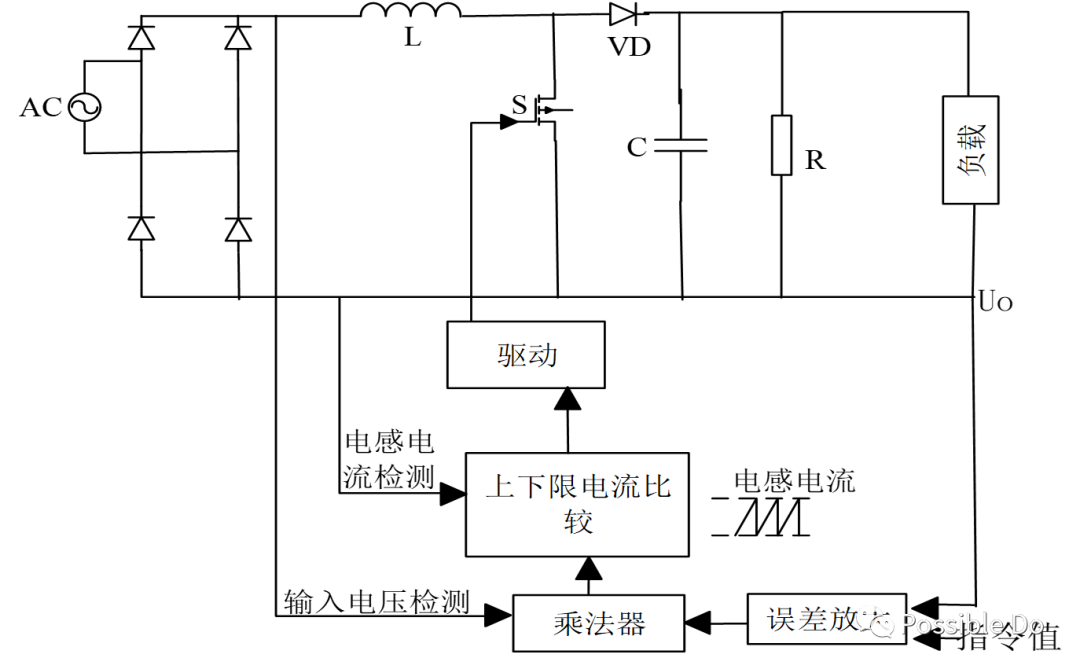
以Boost电路为主体,滞环电流控制部分为控制核心,通过控制开关管的通断,调节占空比将产生的信号中所带有的高次谐波滤去,再采集输出信号至PI控制部分,对输出的信号进行稳定与修正,从而达到输出稳定的电压,输入电流正弦化的目的。
其中,boost下方电路是控制电路,其中包含了电压误差放大器VA和指令电压值,电流误差放大器CA,乘法器和驱动器。输出的直流电压和指令电压值比较后,输入差值到电压误差放大器中,二极管整流后的电压除以其峰值后,与电压误差放大器输出的直流量分别作为乘法器的两个输入端,我们用乘法器的输出当做电流反馈控制的指令值信号,与电感电流检测比较后,经过电流误差放大器加到驱动器,以控制开关的通断,从而使输入电流的波形与整流电压的波形基本一致,使电流谐波大为减少,提高功率因数。
2. APFC之PI控制
Pi即比例-积分控制,是一种线性控制方法。它是将给定值与实际输出值比较得到的控制偏差,并对偏差进行比例和积分计算,再通过比例项和积分项线性组合形成控制信号,对受控对象进行控制。

其中,比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差。而在比例控制中,加入“积分项”,可以消除稳态误差。
时间的积分是积分项对误差到控制量的主要影响因素。随着时间的增加,积分项会增大。即使其误差很小,积分项也会随着时间的推移而增大,导致控制器输出增加,从而使稳态误差进一步降低到零。
因此,PI(比例-积分)控制器可以使系统进入稳态后无稳态误差。
举个栗子:
假设有一个水缸,最终的控制目的是要保证水缸里的水位永远的维持在1米的高度。假设初试时刻,水缸里的水位是0.2米,那么当前时刻的水位和目标水位之间是存在一个误差的error,且error为0.8.这个时候,假设旁边站着一个人,这个人通过往缸里加水的方式来控制水位。
u=kp*error
当考虑另外一种情况,假设这个水缸在加水的过程中,存在漏水的情况,假设每次加水的过程,都会漏掉0.1米高度的水。
仍然假设kp取0.5,那么会存在着某种情况,假设经过几次加水,水缸中的水位到0.8时,水位将不会再变换。因为,水位为0.8,则误差error=0.2. 所以每次往水缸中加水的量为u=0.5*0.2=0.1.同时,每次加水缸里又会流出去0.1米的水!!!加入的水和流出的水相抵消,水位将不再变化。也就是说,我的目标是1米,但是最后系统达到0.8米的水位就不在变化了,且系统已经达到稳定。由此产生的误差就是稳态误差了。 (在实际情况中,这种类似水缸漏水的情况往往更加常见,比如控制汽车运动,摩擦阻力就相当于是“漏水”,控制机械臂、无人机的飞行,各类阻力和消耗都可以理解为本例中的“漏水”) 因此,单独的比例控制,在很多时候并不能满足要求。
这个时候的控制量,除了比例的那一部分,还有一部分就是一个系数ki乘以这个积分项。由于这个积分项会将前面若干次的误差进行累计,所以可以很好的消除稳态误差(假设在仅有比例项的情况下,系统卡在稳态误差了,即上例中的0.8,由于加入了积分项的存在,会让输入增大,从而使得水缸的水位可以大于0.8,渐渐到达目标的1.0.)这就是积分项的作用。
3.APFC之滞环控制

滞环电流控制法存在一个滞环宽度的概念,其中宽度上限可以约束电感电流的最大值,宽度下限则是可以约束电感电流的最小值。简单来说就是通过给电感电流一个上下限,将其约束在一个范围内。

滞环电流控制的优点:
(1)不需要斜坡补偿;
(2)输入电流谐波含量少;
缺点:
(1)开关频率不恒定;
(2)必须要对电感电流进行采样;
(3)易受到整流噪音的干扰。
①系统架构图

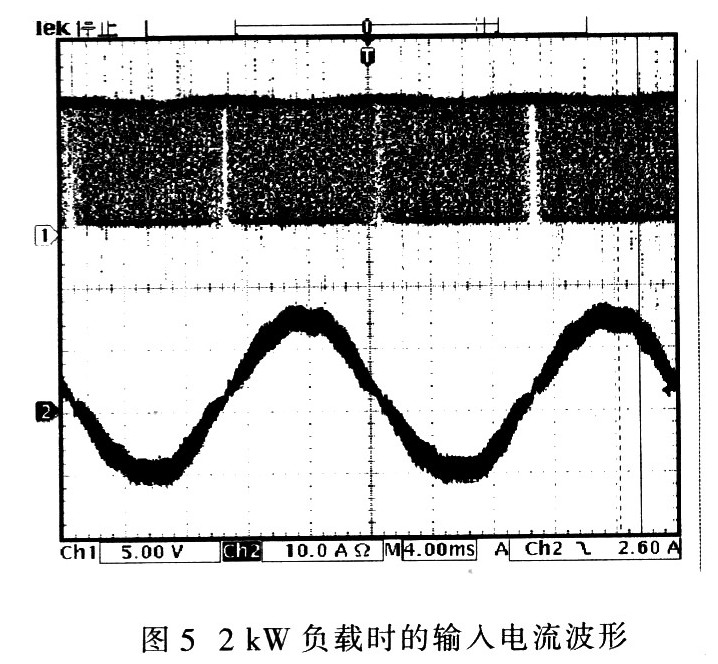
②输入电压为220V的交流侧电压与电流波形图
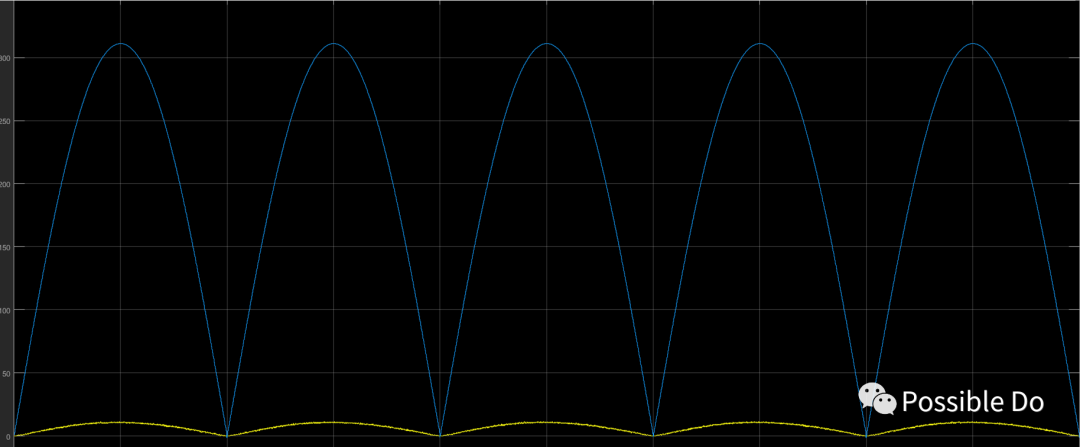
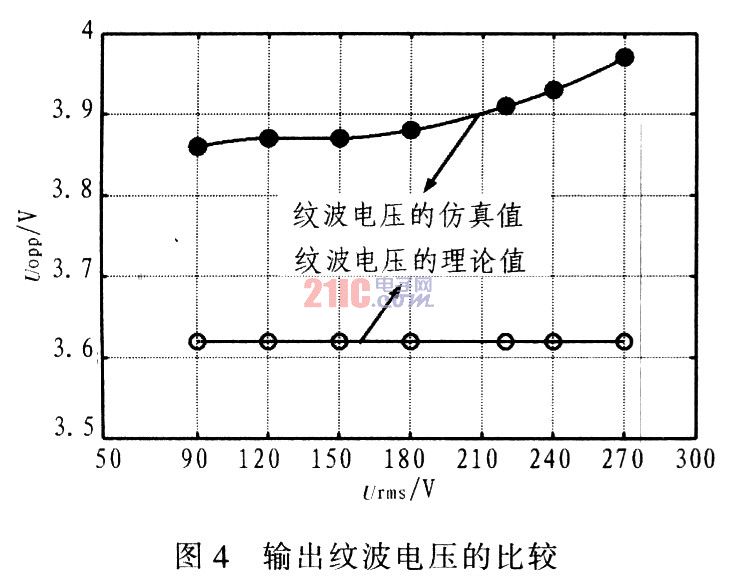
③输入电压为220V的直流电压波形图

-
驱动器
+关注
关注
52文章
8236浏览量
146335 -
误差放大器
+关注
关注
9文章
98浏览量
34958 -
电感电流
+关注
关注
0文章
88浏览量
11076 -
PI控制器
+关注
关注
1文章
25浏览量
11383 -
APFC电路
+关注
关注
0文章
4浏览量
7871
发布评论请先 登录
相关推荐
采用UC3854的有源功率因数校正电路工作原理与应用
有源功率因数校正威廉希尔官方网站 介绍
电子镇流器功率因素校正电路APFC的分析
电压临界工作模式的有源功率因数校正原理设计
浅析有源功率因数校正威廉希尔官方网站 及发展趋势







 工商网监
工商网监
评论