 驱动LSM6DS3TR-C实现高效运动检测与数据采集(4)----上报匿名上位机实现可视化
驱动LSM6DS3TR-C实现高效运动检测与数据采集(4)----上报匿名上位机实现可视化
概述
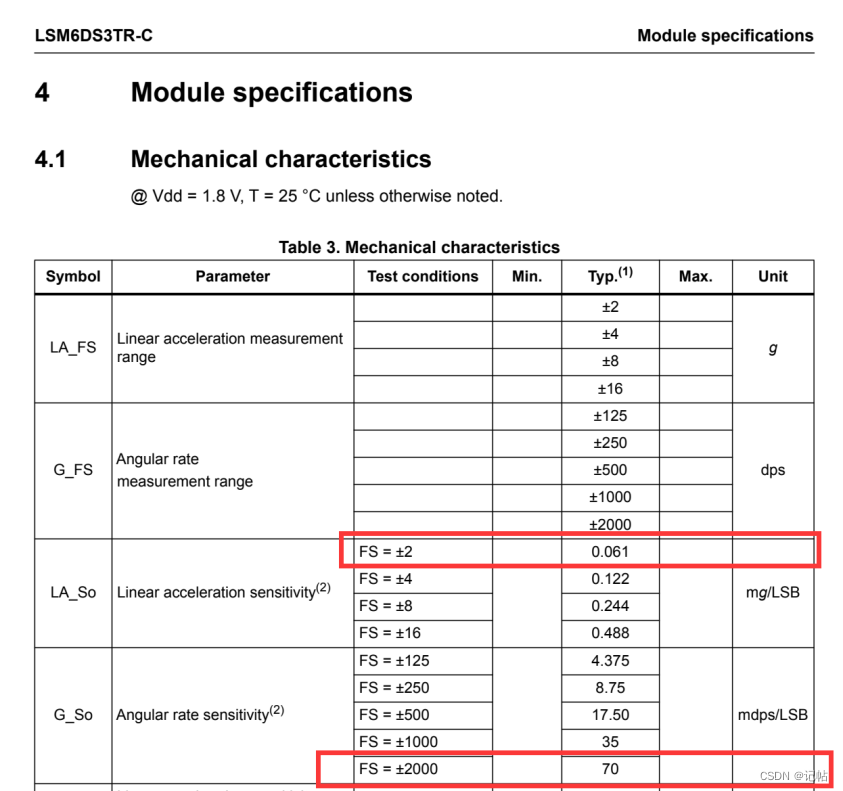
LSM6DS3TR-C是单芯片“3轴陀螺仪 + 3轴加速度计”的惯性 测量单元(IMU), 五种种可选满量程的陀螺仪(125/250/500/1000/2000 dps)和加速度计(2/4/8/16 g)。
上述工程中选择的加速度和陀螺仪对应的量程为2g和2000dps,对应的灵敏度如下所示,分别为0.061mg/LSB和70mdps/LSB。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
视频教学
[https://www.bilibili.com/video/BV14h4y1R7kc/]
样品申请
[https://www.wjx.top/vm/OhcKxJk.aspx#]
完整代码下载
[https://download.csdn.net/download/qq_24312945/87921267]
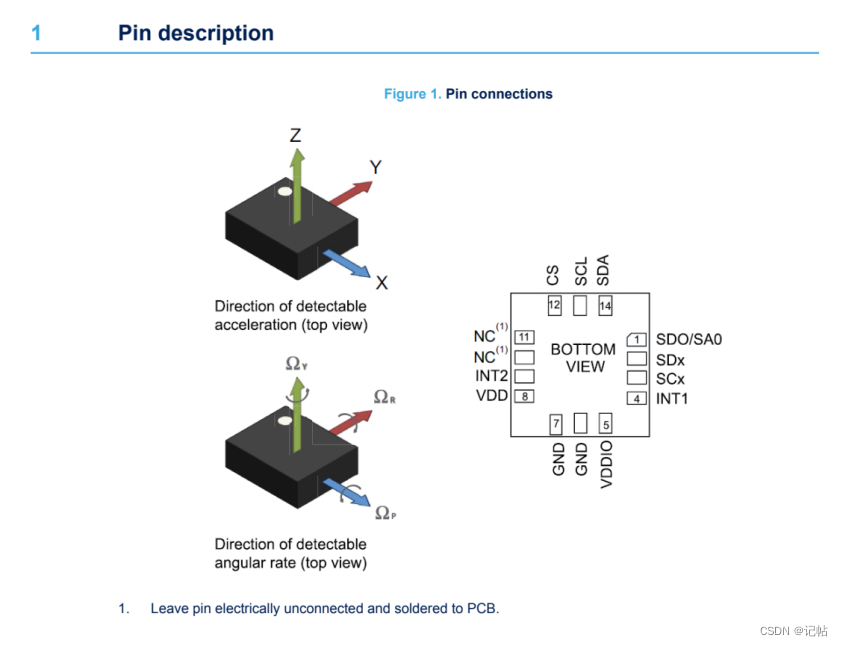
参考坐标系
测量加速度
LSM6DS3TR-C有一个片上加速度计,可以在 ±2g、±4g、±8g 和 ±16g 四个可编程满量程范围内测量加速度。

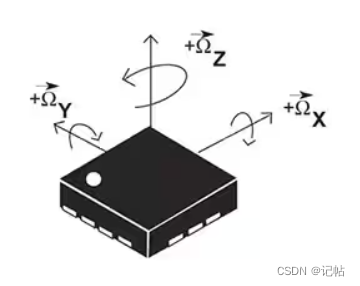
测量角速度
MPU6050 有一个片上陀螺仪,可以在 ±125°/s ±250°/s、±500°/s、±1000°/s 和 ±2000°/s 的四个可编程满量程范围内测量角度旋转。

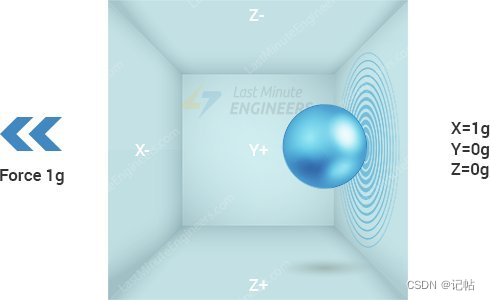
加速度计工作方式
假设立方体在外太空,那里的一切都是失重的,球会简单地漂浮在立方体的中心。

现在,假设每面墙代表一个特定的轴。 如果我们突然以 1g 的加速度向左移动盒子(单个 G 力 1g 相当于重力加速度 9.8 m/s 2),球无疑会撞到墙壁 X。如果我们测量球对墙壁施加的力X,我们可以得到沿X轴的输出值为1g。
让我们看看当我们把那个立方体放在地球上时会发生什么。球将简单地落在墙 Z 上,施加 1g 的力,如下图所示:
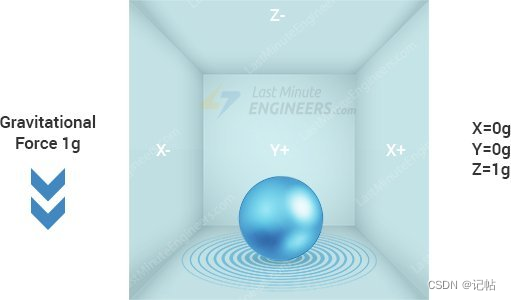
在这种情况下,盒子没有移动,但我们仍然在 Z 轴上得到 1g 的读数。这是因为重力(实际上是加速度的一种形式)以 1g 的力向下拉球。
虽然此模型并不完全代表真实世界的加速度计传感器是如何构建的,但它通常有助于理解为什么加速度计的输出信号通常以 ±g 为单位指定,或者为什么加速度计在静止时在 z 轴上读数为 1g,或者您可以在不同方向上获得什么样的加速度计读数。
上位机通讯
这里使用的是匿名助手的上位机
[https://gitee.com/anotc/AnoAssistant]
有专门的通讯协议

串口通讯协议格式如下所示,需要注意传输为小端模式传输。

对应的源地址和目标地址分别为0xFD和0xFE。
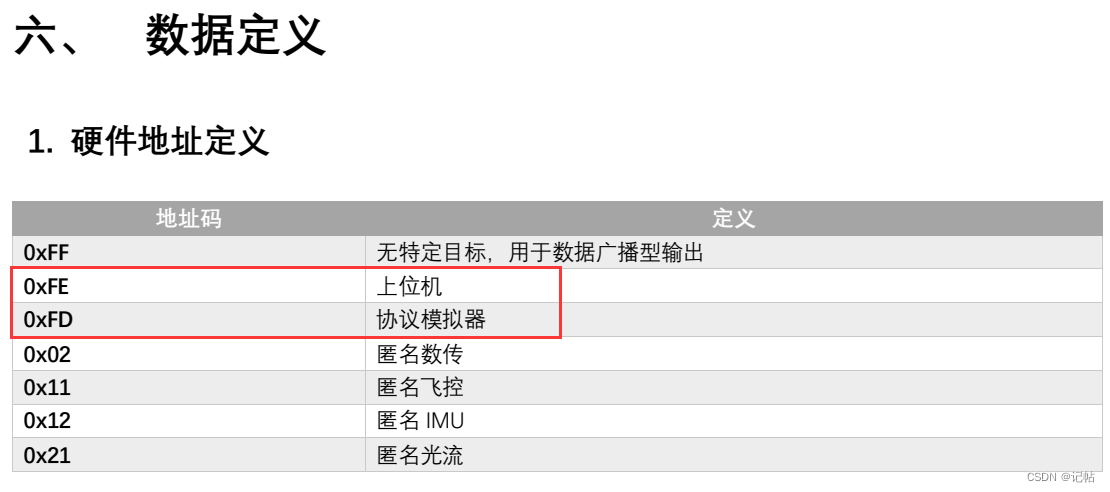
我们只需要上报加速度和陀螺仪数据,所以功能码为0x01,数据长度为0x0D,需要主要为小端模式传输。

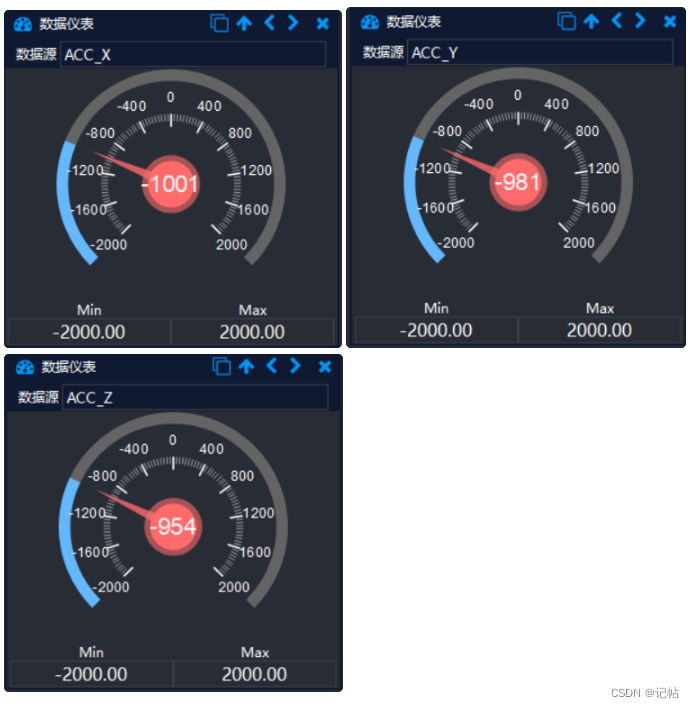
加速度演示
实测移动模块分别为X、Y、Z轴向下,可以看见数值基本上为1000mg。
陀螺仪工作方式
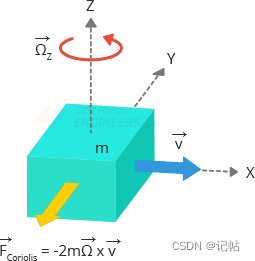
加速度计测量线性加速度,而陀螺仪测量角旋转。为此,他们测量了科里奥利效应产生的力。
陀螺仪是一种运动传感器,能够感测物体在一轴或多轴上的旋转角速度。它能够精确地感测自由空间中复杂的移动动作,因此成为追踪物体移动方位和旋转动作的必要设备。与加速计和电子罗盘不同,陀螺仪不需要依赖外部力量(如重力或磁场),可以自主地发挥其功能。
因此,从理论上讲,只使用陀螺仪就可以完成姿态导航的任务。
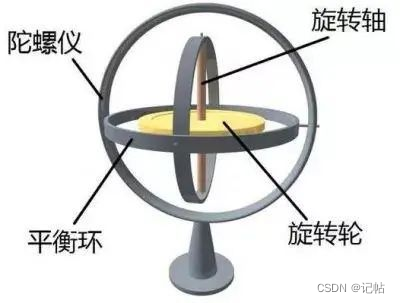
陀螺仪的每个通道检测一个轴的旋转。也就是说陀螺仪通过测量自身的旋转状态,判断出设备当前运动状态,是向前、向后、向上、向下、向左还是向右呢,是加速(角速度)还是减速(角速度)呢,都可以实现,但是要判断出设备的方位(东西南北),陀螺仪就没有办法。
MEMS陀螺仪主要利用科里奥利力(旋转物体在有径向运动时所受到的切向力)原理,公开的微机械陀螺仪均采用振动物体传感角速度的概念,利用振动来诱导和探测科里奥利力。
MEMS陀螺仪的核心是一个微加工机械单元,在设计上按照一个音叉机制共振运动,通过科里奥利力原理把角速率转换成一个特定感测结构的位移。
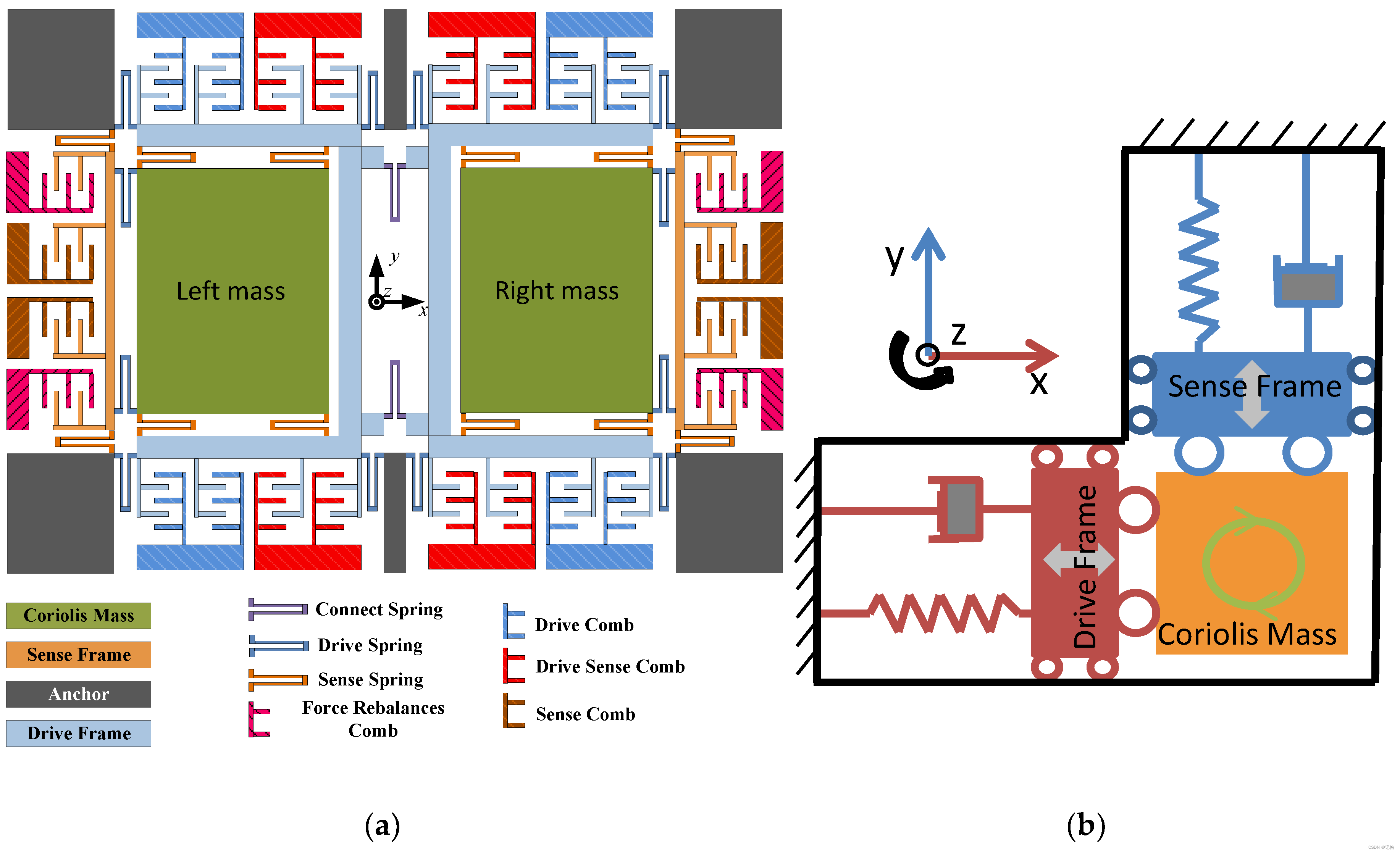
两个相同的质量块以方向相反的做水平震荡。当外部施加一个角速率,就会出现一个科氏力,力的方向垂直于质量运动方向,如垂直方向箭头所示。产生的科氏力使感测质量发生位移,位移大小与所施加的角速率大小成正比,科氏力引起的电容变化即可计算出角速率大小。 科里奥利效应指出,当质量 (m) 以速度 (v) 沿特定方向移动并施加外部角速率 (Ω)(红色箭头)时,科里奥利效应会产生一个力(黄色箭头),导致质量垂直移动。该位移的值与应用的角速率直接相关。
上报源码
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
printf("hello");
if (LSM6DS3TRC_Init(LSM6DS3TRC_MODE_I2C) == false)
printf("LSM6DS3TRC initialize error.rn");
else
printf("LSM6DS3TRC initialize register finished.rn");
int16_t acc_int16[3] ={0,0,0};
int16_t gyr_int16[3] ={0,0,0};
float acc[3] = {0};
float gyr[3] = {0};
uint8_t data[21]={0};
data[0]=0xAB;//帧头
data[1]=0xFD;//源地址
data[2]=0xFE;//目标地址
data[3]=0x01;//功能码ID
data[4]=0x0D;//数据长度LEN
data[5]=0x00;//数据长度LEN 13
uint8_t sumcheck = 0;
uint8_t addcheck = 0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
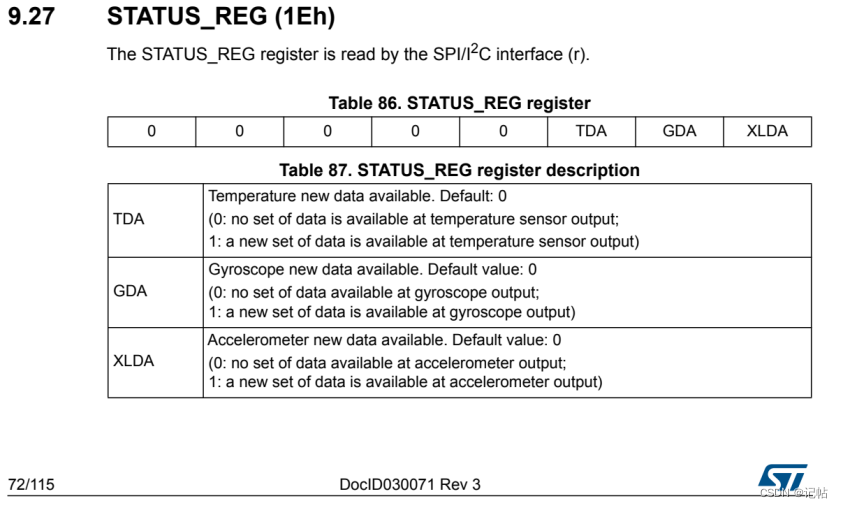
uint8_t status;
status = LSM6DS3TRC_Get_Status();
if (status & LSM6DS3TRC_STATUS_ACCELEROMETER)
{
LSM6DS3TRC_Get_Acceleration(LSM6DS3TRC_ACC_FSXL_2G, acc);
// printf("rnacc:X:%2f,tY:%2f,tZ:%2fr", acc[0], acc[1], acc[2]);
}
if (status & LSM6DS3TRC_STATUS_GYROSCOPE)
{
LSM6DS3TRC_Get_Gyroscope(LSM6DS3TRC_GYR_FSG_2000, gyr);
// printf("rgyr:X:%4.2f,tY:%4.2f,tZ:%4.2fr", gyr[0], gyr[1], gyr[2]);
}
if (status & LSM6DS3TRC_STATUS_TEMPERATURE)
{
// printf("rtemp:%2frn", LSM6DS3TRC_Get_Temperature());
}
//匿名上位机
acc_int16[0]=(int16_t)(acc[0]);
acc_int16[1]=(int16_t)(acc[1]);
acc_int16[2]=(int16_t)(acc[2]);
gyr_int16[0]=(int16_t)(gyr[0])/1000;
gyr_int16[1]=(int16_t)(gyr[1])/1000;
gyr_int16[2]=(int16_t)(gyr[2])/1000;
data[7]=acc_int16[0] >>8;//ACC_X
data[6]=acc_int16[0];
data[9]=acc_int16[1] >>8;//ACC_Y
data[8]=acc_int16[1];
data[11]=acc_int16[2] >>8;//ACC_Z
data[10]=acc_int16[2];
data[13]=gyr_int16[0] >>8;//GYR_X
data[12]=gyr_int16[0];
data[15]=gyr_int16[1] >>8;//GYR_Y
data[14]=gyr_int16[1];
data[17]=gyr_int16[2] >>8;//GYR_Z
data[16]=gyr_int16[2];
data[18]=0;
sumcheck = 0;
addcheck = 0;
for(uint16_t i=0; i < 19; i++)
{
sumcheck += data[i]; //从帧头开始,对每一字节进行求和,直到 DATA 区结束
addcheck += sumcheck; //每一字节的求和操作,进行一次 sumcheck 的累加
}
data[19]=sumcheck;
data[20]=addcheck;
HAL_UART_Transmit(&huart1 , (uint8_t *)&data, 21, 0xFFFF);
// printf("naccx=%d accy=%d accz=%d gyrx=%d gyry=%d gyrx=%d ",acc_int16[0],acc_int16[1],acc_int16[2],gyr_int16[0],gyr_int16[1],gyr_int16[2]);
HAL_Delay(100);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
审核编辑 黄宇
-
mems
+关注
关注
129文章
3928浏览量
190592 -
陀螺仪
+关注
关注
44文章
783浏览量
98670 -
数据采集
+关注
关注
38文章
6060浏览量
113630 -
上位机
+关注
关注
27文章
941浏览量
54792 -
运动检测
+关注
关注
0文章
34浏览量
12613
发布评论请先 登录
相关推荐
驱动LSM6DS3TR-C实现高效运动检测与数据采集(1)----获取ID
驱动LSM6DS3TR-C实现高效运动检测与数据采集(6)----FIFO数据读取与配置

陀螺仪LSM6DSOW开发(2)----上报匿名上位机实现可视化
陀螺仪LSM6DSV16X与AI集成(14)----上报匿名上位机
LSM6DS3TR-C使用时工作电流比datasheet上大很多是什么原因?
请问LSM6DS3TR和LSM6DS3TR-C两个型号能否完全兼容?
LSM6DS3TR-C数据读取异常是安利的问题?怎么处理?
LSM6DS3TR-C的FIFO读取数据出错是什么原因造成的?怎么解决?
驱动LSM6DS3TR-C实现高效运动检测与数据采集(2)----配置滤波器
驱动LSM6DS3TR-C实现高效运动检测与数据采集(3)----获取传感器数据
驱动LSM6DS3TR-C实现高效运动检测与数据采集(5)----姿态解算






 工商网监
工商网监
评论