 力控机器人阻抗控制的势与流
力控机器人阻抗控制的势与流
力控机器人是一种能够感知和控制外部力或力矩作用的机器人系统。它具有实时感知和响应外部力的能力,通过传感器和控制算法实现对力的测量和控制,以实现与环境或人类用户的交互和协作。
力控机器人的内涵主要包括以下几个方面:
1. 力感知:力控机器人通过装备力传感器或力/力矩传感器来感知外部施加在其末端执行器或传动装置上的力或力矩。这些传感器可以测量作用力的大小、方向和施加点位置等信息。
2. 力控制:力控机器人能够根据外部力的变化实时调整执行器的控制指令,以实现力的控制。它可以根据预设的控制策略和算法对外部力进行反馈控制,使机器人能够适应环境变化或与人类用户进行协作。
3. 力反馈:力控机器人能够将感知到的外部力信息反馈给操作者或控制系统,以实现与操作者的力交互或实时力反馈控制。通过力反馈,机器人可以更好地与环境进行交互,实现更精确的力操作或协作任务。
与协作机器人相比,力控机器人注重感知和控制外部力的能力,以实现更加精细的力操作和协作任务。它的主要特点是能够主动感知和响应外部力,实现与环境或人类用户的高度互动和协作。力控机器人在与人类合作、灵活操作和精确力控制等方面具有优势。
协作机器人则更加注重与人类的协作能力,强调机器人与人类用户之间的交互和合作。
协作机器人通常具有更高的自主性和智能性,能够理解和响应人类的指令、意图和姿态,实现人机协同工作。协作机器人的任务可能包括与人类共享工作空间、协同完成任务、提供辅助服务等。
因此,力控机器人和协作机器人在内涵和重点上有所不同,但两者也存在交叉和重叠的部分。力控机器人可以作为协作机器人的一种实现手段,通过力感知和力控制实现与人类的高效协作。
在某些应用场景下,力控机器人和协作机器人可以结合起来,发挥各自的优势,实现更复杂和高级的任务和交互。
力、电压等物理量叫做势(effort),速度、加速度、电流等物理量叫流(flow)
在力控机器人的物理交互中,阻抗控制涉及到两个关键概念:势(effort)和流(flow)。
势(effort)表示施加在物体上的力或力矩,也可以理解为输出力或输出力矩。在阻抗控制中,势通常是通过传感器测量得到的机器人端执行器的输出力或力矩。
流(flow)表示物体的变化速率,也可以理解为输入力或输入力矩。在阻抗控制中,流通常是由外部环境施加在机器人上的力或力矩。
阻抗控制的目标是根据期望的力或力矩与实际的力或力矩之间的误差来调整机器人的势,以实现所需的物理交互行为。通过调整势,可以控制机器人对外部力或力矩的响应,并实现不同的阻抗特性。
在阻抗控制中,势和流之间的关系可以用以下公式表示:
势 = 阻抗 × 流
其中,阻抗是一个参数,用于调节势和流之间的关系。不同的阻抗参数可以实现不同的物理交互行为,例如刚性、柔软或粘性。
通过实时测量机器人端的输出力或力矩,与期望的力或力矩进行比较,并根据阻抗参数调整机器人的势,可以实现对外部力或力矩的控制和调节,从而实现物理交互的目标。
需要注意的是,在阻抗控制中,势和流的单位需要一致,例如力与力、力矩与力矩。在实际应用中,通常使用力/力矩传感器来测量势,而外部力或力矩可以通过外部力传感器或其他测量设备进行测量。
总之,阻抗控制通过调节机器人的势和外部力或力矩之间的关系,实现对物理交互的控制和调节。通过适当选择阻抗参数,可以实现不同的物理交互行为,从刚性到柔软甚至粘性。
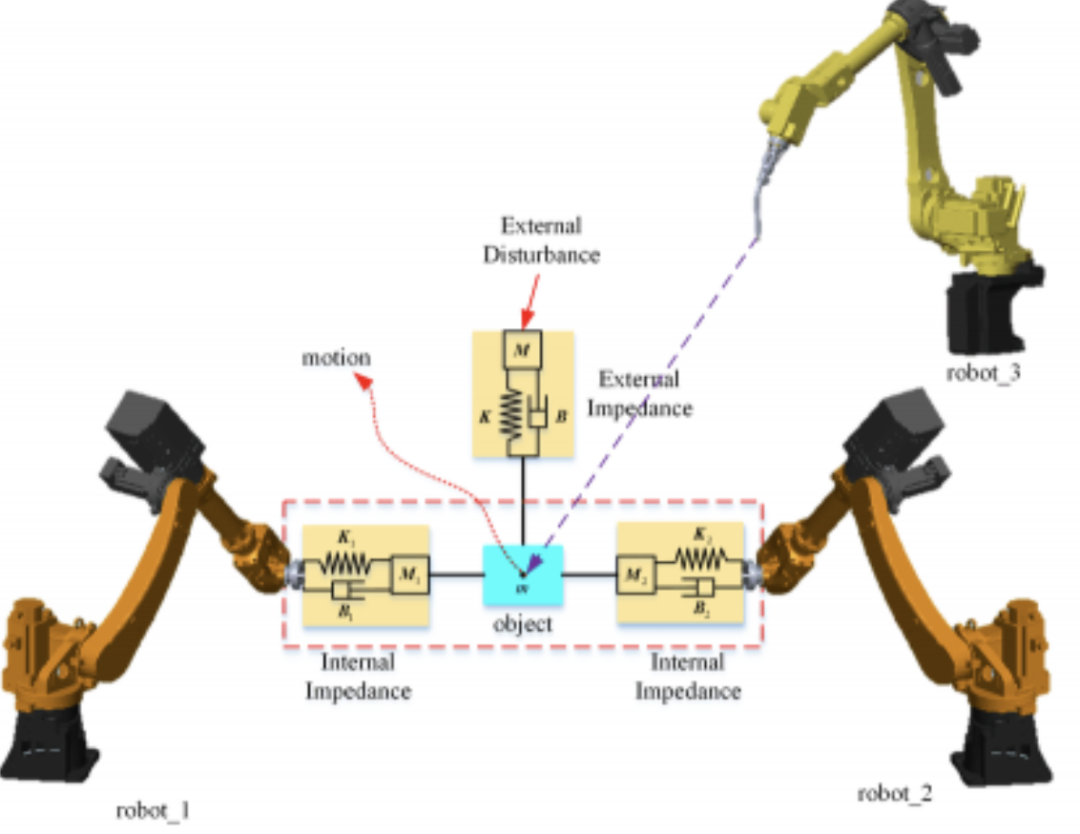
Hogan提出了阻抗控制的理论框架,该框架将机器人与外部环境的交互建模为质量、阻尼和弹簧组成的阻抗元素。阻抗控制器通过调节这些阻抗元素的参数,实现对机器人末端执行器与质点之间交互力的控制。
-
机器人
+关注
关注
211文章
28392浏览量
206961 -
力控
+关注
关注
0文章
22浏览量
7858 -
协作机器人
+关注
关注
2文章
489浏览量
30131
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论