 学习CAN通信协议(下)--实例讲解
学习CAN通信协议(下)--实例讲解
前一篇介绍了CAN通信协议的理论知识:学习CAN通信协议(上)--理论。本篇文章结合实际CAN控制器继续介绍协议相关的内容,还有示例讲解。
好了,继续吧!
二. STM32 CAN 控制器介绍
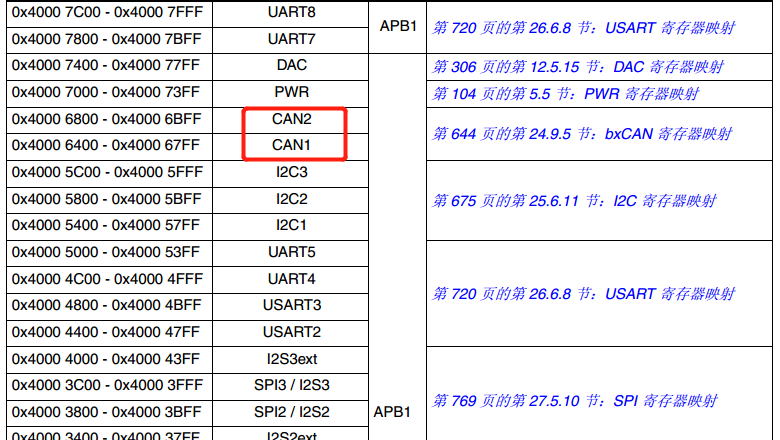
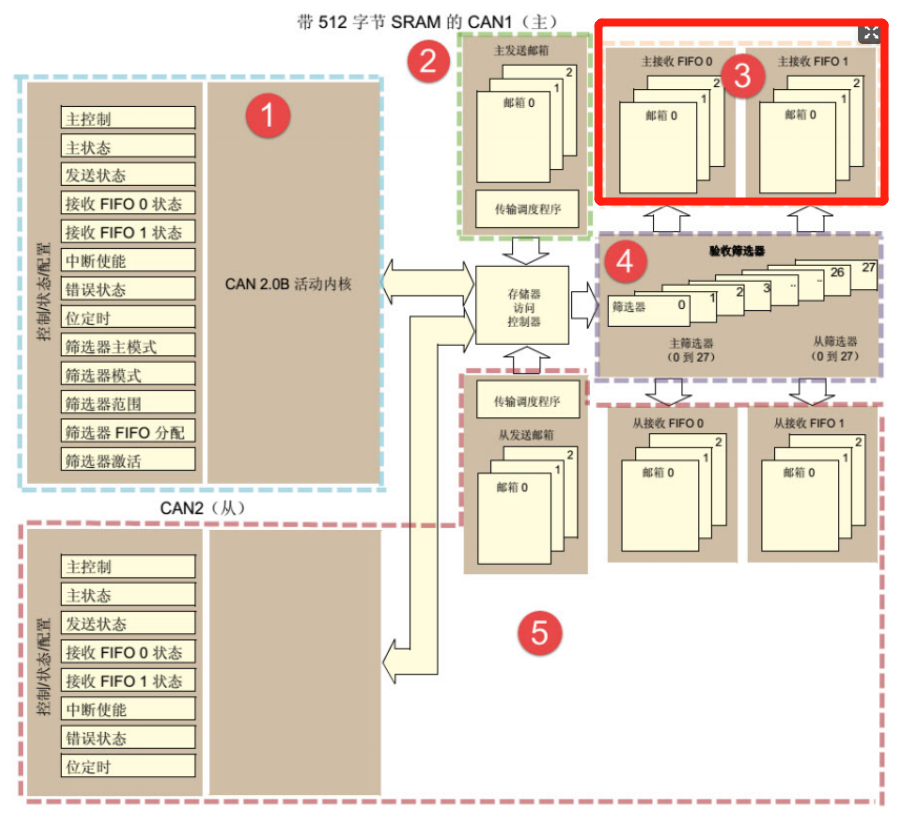
STM32 的芯片中具有 bxCAN 控制器 (Basic Extended CAN),它支持 CAN 协议 2.0A 和 2.0B 标准。该 CAN 控制器支持最高的通讯速率为 1Mb/s;可以自动地接收和发送 CAN 报文,支持使用标准ID 和扩展 ID 的报文;外设中具有 3 个发送邮箱,发送报文的优先级可以使用软件控制,还可以记录发送的时间;具有 2 个 3 级深度的接收 FIFO,可使用过滤功能只接收或不接收某些 ID 号的报文;可配置成自动重发;不支持使用 DMA 进行数据收发。框架示意图如下: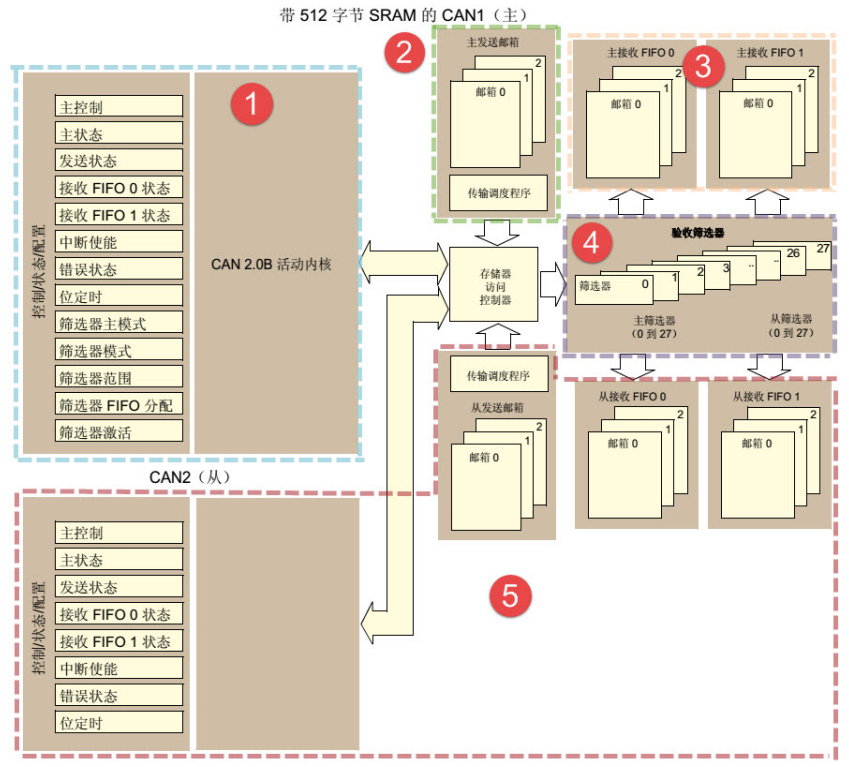 STM32 的有两组 CAN 控制器,其中 CAN1 是主设备,框图中的“存储访问控制器”是由 CAN1控制的,CAN2 无法直接访问存储区域,所以使用 CAN2 的时候必须使能 CAN1 外设的时钟。框图中主要包含 CAN 控制内核、发送邮箱、接收 FIFO 以及验收筛选器,下面对框图中的各个部分进行介绍。
STM32 的有两组 CAN 控制器,其中 CAN1 是主设备,框图中的“存储访问控制器”是由 CAN1控制的,CAN2 无法直接访问存储区域,所以使用 CAN2 的时候必须使能 CAN1 外设的时钟。框图中主要包含 CAN 控制内核、发送邮箱、接收 FIFO 以及验收筛选器,下面对框图中的各个部分进行介绍。2.1 CAN 控制内核
框图中标号处的 CAN 控制内核包含了各种控制寄存器及状态寄存器,我们主要讲解其中的主控制寄存器 CAN_MCR 及位时序寄存器 CAN_BTR。
2.1.1 主控制寄存器 CAN_MCR
主控制寄存器 CAN_MCR 负责管理 CAN 的工作模式,它使用以下寄存器位实现控制。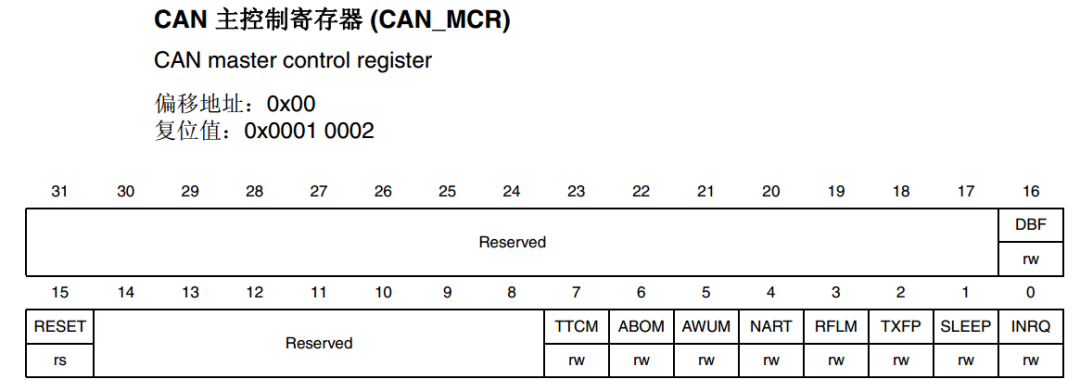 (1) DBF 调试冻结功能
(1) DBF 调试冻结功能DBF(Debug freeze) 调试冻结,使用它可设置 CAN 处于工作状态或禁止收发的状态,禁止收发时仍可访问接收 FIFO 中的数据。这两种状态是当 STM32 芯片处于程序调试模式时才使用的,平时使用并不影响。
(2) TTCM 时间触发模式
TTCM(Time triggered communication mode) 时间触发模式,它用于配置 CAN 的时间触发通信模式,在此模式下,CAN 使用它内部定时器产生时间戳,并把它保存在CAN_RDTxR、CAN_TDTxR 寄存器中。内部定时器在每个 CAN 位时间累加,在接收和发送的帧起始位被采样,并生成时间戳。利用它可以实现 ISO 11898-4 CAN 标准的分时同步通信功能。
(3) ABOM 自动离线管理
ABOM (Automatic bus-off management) 自动离线管理,它用于设置是否使用自动离线管理功能。当节点检测到它发送错误或接收错误超过一定值时,会自动进入离线状态,在离线状态中, CAN 不能接收或发送报文。处于离线状态的时候,可以软件控制恢复或者直接使用这个自动离线管理功能,它会在适当的时候自动恢复。
(4) AWUM 自动唤醒
AWUM (Automatic bus-off management),自动唤醒功能,CAN 外设可以使用软件进入低功耗的睡眠模式,如果使能了这个自动唤醒功能,当 CAN 检测到总线活动的时候,会自动唤醒。
(5) NART 自动重传
NART(No automatic retransmission) 报文自动重传功能,设置这个功能后,当报文发送失败时会自动重传至成功为止。若不使用这个功能,无论发送结果如何,消息只发送一次。
(6) RFLM 锁定模式
RFLM(Receive FIFO locked mode)FIFO 锁定模式,该功能用于锁定接收 FIFO 。锁定后,当接收 FIFO 溢出时,会丢弃下一个接收的报文。若不锁定,则下一个接收到的报文会覆盖原报文。
(7) TXFP 报文发送优先级的判定方法
TXFP(Transmit FIFO priority) 报文发送优先级的判定方法,当 CAN 外设的发送邮箱中有多个待发送报文时,本功能可以控制它是根据报文的 ID 优先级还是报文存进邮箱的顺序来发送。
2.1.2 位时序寄存器 (CAN_BTR) 及波特率
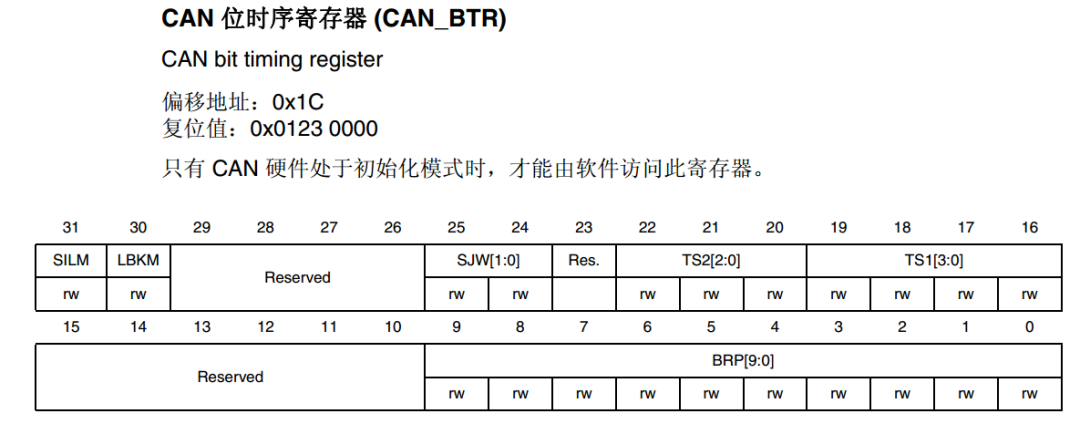 CAN 外设中的位时序寄存器 CAN_BTR 用于配置测试模式、波特率以及各种位内的段参数。
CAN 外设中的位时序寄存器 CAN_BTR 用于配置测试模式、波特率以及各种位内的段参数。2.1.2.1 模式
位31 SILM:静默模式(调试)(Silent mode (debug))
0:正常工作
1:静默模式
位30 LBKM:环回模式(调试)(Loop back mode (debug))
0:禁止环回模式1:使能环回模式为方便调试,STM32 的 CAN 提供了测试模式,配置位时序寄存器 CAN_BTR 的 SILM 及 LBKM寄存器位可以控制使用正常模式、静默模式、回环模式及静默回环模式,见图。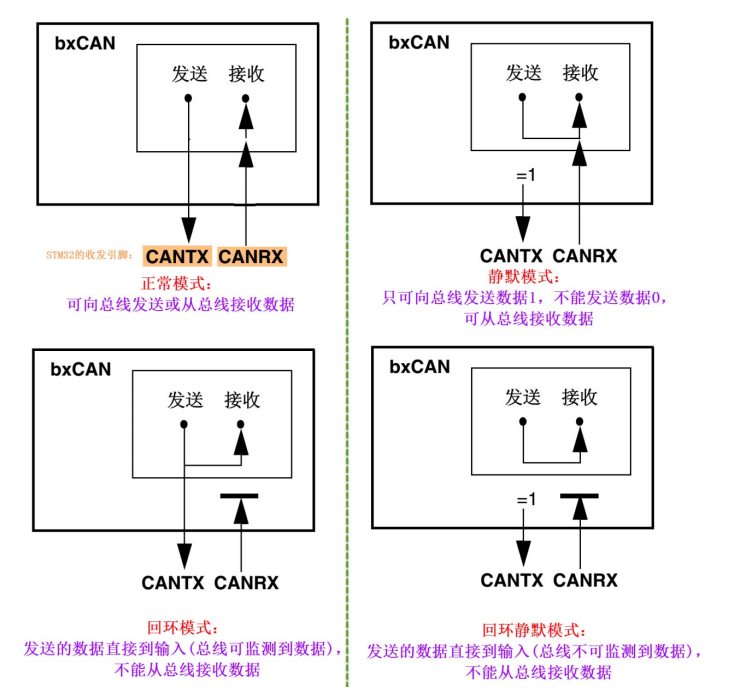
各个工作模式介绍如下:
• 正常模式
正常模式下就是一个正常的 CAN 节点,可以向总线发送数据和接收数据。
• 静默模式
静默模式下,它自己的输出端的逻辑 0 数据会直接传输到它自己的输入端,逻辑 1 可以被发送到总线,所以它不能向总线发送显性位 (逻辑 0),只能发送隐性位 (逻辑 1)。输入端可以从总线接收内容。由于它只可发送的隐性位不会强制影响总线的状态,所以把它称为静默模式。这种模式一般用于监测,它可以用于分析总线上的流量,但又不会因为发送显性位而影响总线。
• 回环模式
回环模式下,它自己的输出端的所有内容都直接传输到自己的输入端,输出端的内容同时也会被传输到总线上,即也可使用总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。使用回环模式可以进行自检。
• 回环静默模式
回环静默模式是以上两种模式的结合,自己的输出端的所有内容都直接传输到自己的输入端,并且不会向总线发送显性位影响总线,不能通过总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。这种方式可以在“热自检”时使用,即自我检查的时候,不会干扰总线。
以上说的各个模式,是不需要修改硬件接线的,例如,当输出直接连输入时,它是在 STM32 芯片内部连接的,传输路径不经过 STM32 的 CAN_Tx/Rx 引脚,更不经过外部连接的 CAN 收发器,只有输出数据到总线或从总线接收的情况下才会经过 CAN_Tx/Rx 引脚和收发器
2.1.2.2 位时序及波特率
STM32 外设定义的位时序与我们前面解释的 CAN 标准时序有一点区别,见图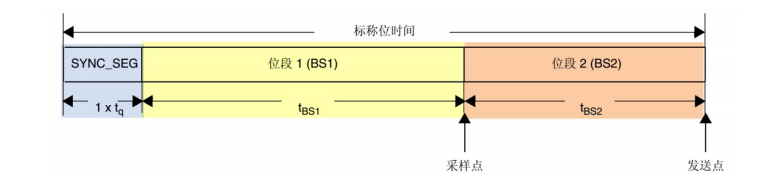 STM32 的 CAN 外设位时序中只包含 3 段,分别是同步段 SYNC_SEG、位段 BS1 及位段 BS2,采样点位于 BS1 及 BS2 段的交界处。其中 SYNC_SEG 段固定长度为 1Tq,而 BS1 及 BS2 段可以
STM32 的 CAN 外设位时序中只包含 3 段,分别是同步段 SYNC_SEG、位段 BS1 及位段 BS2,采样点位于 BS1 及 BS2 段的交界处。其中 SYNC_SEG 段固定长度为 1Tq,而 BS1 及 BS2 段可以在位时序寄存器 CAN_BTR 设置它们的时间长度,它们可以在重新同步期间增长或缩短,该长度SJW 也可在位时序寄存器中配置。
理解 STM32 的 CAN 外设的位时序时,可以把它的 BS1 段理解为是由前面介绍的 CAN 标准协议中 PTS 段与 PBS1 段合在一起的,而 BS2 段就相当于 PBS2 段。
了解位时序后,我们就可以配置波特率了。通过配置位时序寄存器 CAN_BTR 的 TS1[3:0] 及
TS2[2:0] 寄存器位设定 BS1 及 BS2 段的长度后,我们就可以确定每个 CAN 数据位的时间:
BS1 段时间:TS1=Tq x (TS1[3:0] + 1),
BS2 段时间:TS2= Tq x (TS2[2:0] + 1),
一个数据位的时间:T1bit =1Tq+TS1+TS2=1+ (TS1[3:0] + 1)+ (TS2[2:0] + 1)= N Tq
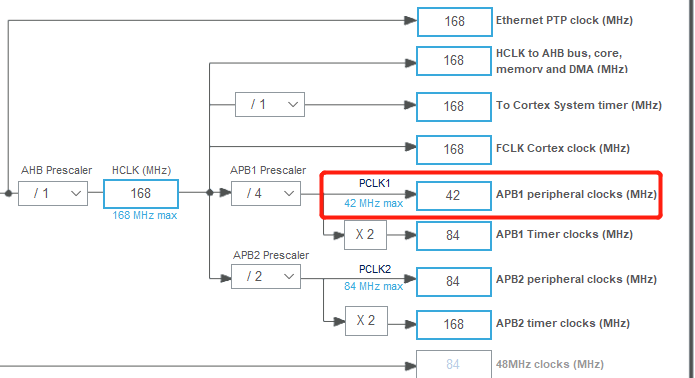
其中单个时间片的长度 Tq 与 CAN 外设的所挂载的时钟总线及分频器配置有关,CAN1 和 CAN2外设都是挂载在 APB1 总线上的,而位时序寄存器 CAN_BTR 中的 BRP[9:0] 寄存器位可以设置
CAN波特率=Fpclk1/((CAN_BS1+CAN_BS2+1)*CAN_Prescaler)
其中clk为42M!
 推荐一个CAN波特率计算器
推荐一个CAN波特率计算器
2.2 CAN 发送邮箱
回到图 中的 CAN 外设框图,在标号处的是 CAN 外设的发送邮箱,它一共有 3 个发送邮箱,即最多可以缓存 3 个待发送的报文。每个发送邮箱中包含有标识符寄存器 CAN_TIxR、数据长度控制寄存器 CAN_TDTxR 及 2 个数据寄存器 CAN_TDLxR、CAN_TDHxR,它们的功能见表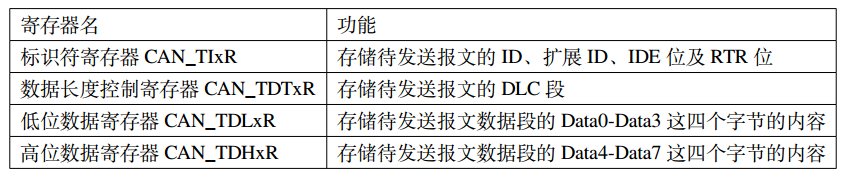 当我们要使用 CAN 外设发送报文时,把报文的各个段分解,按位置写入到这些寄存器中,并对标识符寄存器 CAN_TIxR 中的发送请求寄存器位 TMIDxR_TXRQ 置 1,即可把数据发送出去。其中标识符寄存器 CAN_TIxR 中的 STDID 寄存器位比较特别。我们知道 CAN 的标准标识符的总位数为 11 位,而扩展标识符的总位数为 29 位的。当报文使用扩展标识符的时候,标识符寄存器 CAN_TIxR 中的 STDID[10:0] 等效于 EXTID[18:28] 位,它与 EXTID[17:0] 共同组成完整的 29位扩展标识符。
当我们要使用 CAN 外设发送报文时,把报文的各个段分解,按位置写入到这些寄存器中,并对标识符寄存器 CAN_TIxR 中的发送请求寄存器位 TMIDxR_TXRQ 置 1,即可把数据发送出去。其中标识符寄存器 CAN_TIxR 中的 STDID 寄存器位比较特别。我们知道 CAN 的标准标识符的总位数为 11 位,而扩展标识符的总位数为 29 位的。当报文使用扩展标识符的时候,标识符寄存器 CAN_TIxR 中的 STDID[10:0] 等效于 EXTID[18:28] 位,它与 EXTID[17:0] 共同组成完整的 29位扩展标识符。2.3 CAN 接收 FIFO
图 中的 CAN 外设框图,在标号处的是 CAN 外设的接收 FIFO,它一共有 2 个接收 FIFO,每个 FIFO 中有 3 个邮箱,即最多可以缓存 6 个接收到的报文。当接收到报文时,FIFO 的报文计数器会自增,而 STM32 内部读取 FIFO 数据之后,报文计数器会自减,我们通过状态寄存器可获知报文计数器的值,而通过前面主控制寄存器的 RFLM 位,可设置锁定模式,锁定模式下 FIFO溢出时会丢弃新报文,非锁定模式下 FIFO 溢出时新报文会覆盖旧报文。跟发送邮箱类似,每个接收 FIFO 中包含有标识符寄存器 CAN_RIxR、数据长度控制寄存器CAN_RDTxR 及 2 个数据寄存器 CAN_RDLxR、CAN_RDHxR,它们的功能见表。
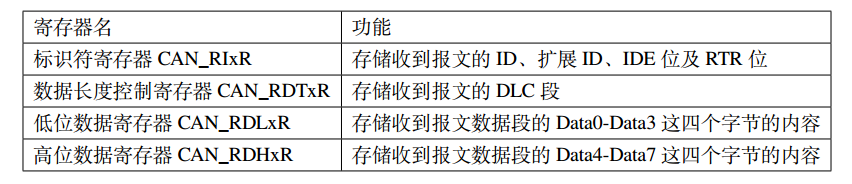
通过中断或状态寄存器知道接收 FIFO 有数据后,我们再读取这些寄存器的值即可把接收到的报文加载到 STM32 的内存中
2.4 验收筛选器
图 中的 CAN 外设框图,在标号处的是 CAN 外设的验收筛选器,一共有 28 个筛选器组,每个筛选器组有 2 个寄存器,CAN1 和 CAN2 共用的筛选器的。
在 CAN 协议中,消息的标识符与节点地址无关,但与消息内容有关。因此,发送节点将报文广播给所有接收器时,接收节点会根据报文标识符的值来确定软件是否需要该消息,为了简化软件的工作,STM32 的 CAN 外设接收报文前会先使用验收筛选器检查,只接收需要的报文到 FIFO中。
筛选器工作的时候,可以调整筛选 ID 的长度及过滤模式。根据筛选 ID 长度来分类有有以下两种:
(1) 检查 STDID[10:0]、EXTID[17:0]、IDE 和 RTR 位,一共 31 位。
(2) 检查 STDID[10:0]、RTR、IDE 和 EXTID[17:15],一共 16 位。
通过配置筛选尺度寄存器 CAN_FS1R 的 FSCx 位可以设置筛选器工作在哪个尺度。而根据过滤的方法分为以下两种模式:
(1) 标识符列表模式,它把要接收报文的 ID 列成一个表,要求报文 ID 与列表中的某一个标识符完全相同才可以接收,可以理解为白名单管理。
(2) 掩码模式,它把可接收报文 ID 的某几位作为列表,这几位被称为掩码,可以把它理解成关键字搜索,只要掩码 (关键字) 相同,就符合要求,报文就会被保存到接收 FIFO。
通过配置筛选模式寄存器 CAN_FM1R 的 FBMx 位可以设置筛选器工作在哪个模式。不同的尺度和不同的过滤方法可使筛选器工作在图 的 4 种状态。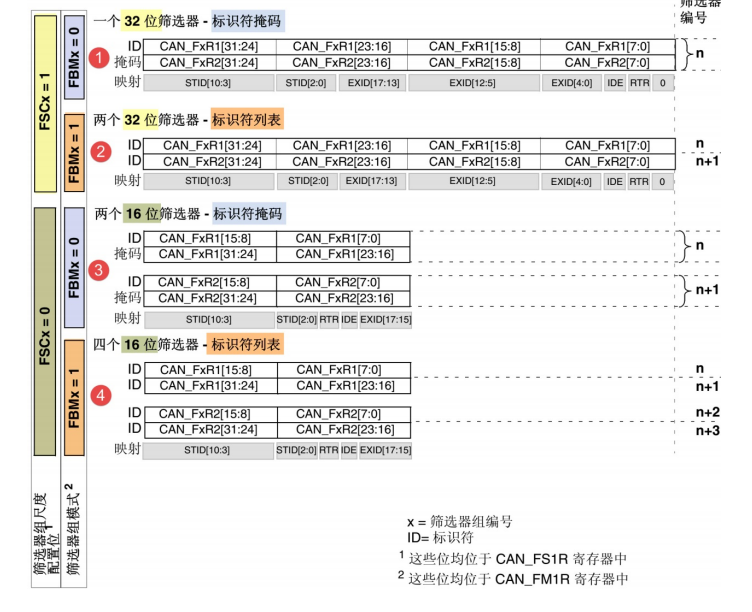
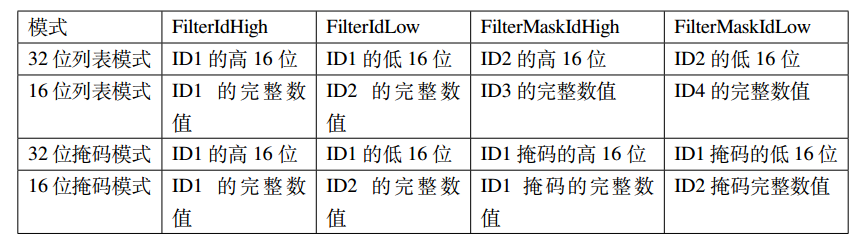
每组筛选器包含 2 个 32 位的寄存器,分别为 CAN_FxR1 和 CAN_FxR2,它们用来存储要筛选的ID 或掩码,各个寄存器位代表的意义与图中两个寄存器下面“映射”的一栏一致,各个模式的说明见表。
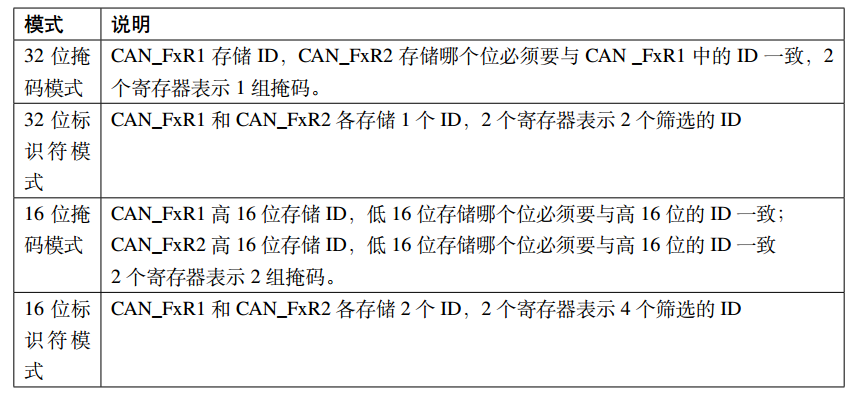
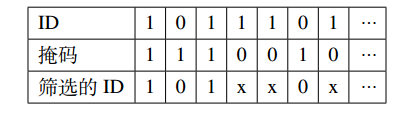
例如下面的表格所示,在掩码模式时,第一个寄存器存储要筛选的 ID,第二个寄存器存储掩码,掩码为 1 的部分表示该位必须与 ID 中的内容一致,筛选的结果为表中第三行的 ID 值,它是一组包含多个的 ID 值,其中 x 表示该位可以为 1 可以为 0。
而工作在标识符模式时,2 个寄存器存储的都是要筛选的 ID,它只包含 2 个要筛选的 ID 值 (32位模式时)。
如果使能了筛选器,且报文的 ID 与所有筛选器的配置都不匹配,CAN 外设会丢弃该报文,不存入接收 FIFO。
2.5 整体控制逻辑
回到图 结构框图,图中的标号处表示的是 CAN2 外设的结构,它与 CAN1 外设是一样的,他们共用筛选器且由于存储访问控制器由 CAN1 控制,所以要使用 CAN2 的时候必须要使能CAN1 的时钟。其中 STM32F103 系列芯片不具有 CAN2 控制器。
2.6 STM32 HAL库代码逻辑
2.6.1 初始化
注意:网络上基本上用的很久的HAL库,我们采用很新的1.25.2,最新的库还是差异挺大的!
从 STM32 的 CAN 外设我们了解到它的功能非常多,控制涉及的寄存器也非常丰富,而使用STM32 HAL 库提供的各种结构体及库函数可以简化这些控制过程。跟其它外设一样,STM32
HAL 库提供了 CAN 初始化结构体及初始化函数来控制 CAN 的工作方式,提供了收发报文使用的结构体及收发函数,还有配置控制筛选器模式及 ID 的结构体。这些内容都定义在库文件“STM32F4xx_hal_can.h”及“STM32F4xx_hal_can.c”中,编程时我们可以结合这两个文件内的注释使用或参考库帮助文档。首先我们来学习初始化结构体的内容,见代码清单 1。代码清单 CAN 初始化结构
typedefstruct { uint32_tPrescaler;/*配置CAN外设的时钟分频,可设置为1-1024*/ uint32_tMode;/*配置CAN的工作模式,回环或正常模式*/ uint32_tSyncJumpWidth;/*配置SJW极限值*/ uint32_tTimeSeg1;/*配置BS1段长度*/ uint32_tTimeSeg2;/*配置BS2段长度*/ FunctionalStateTimeTriggeredMode;/*是否使能TTCM时间触发功能*/ FunctionalStateAutoBusOff;/*是否使能ABOM自动离线管理功能*/ FunctionalStateAutoWakeUp;/*是否使能AWUM自动唤醒功能*/ FunctionalStateAutoRetransmission;/*是否使能NART自动重传功能*/ FunctionalStateReceiveFifoLocked;/*是否使能RFLM锁定FIFO功能*/ FunctionalStateTransmitFifoPriority;/*配置TXFP报文优先级的判定方法*/ }CAN_InitTypeDef;
体这些结构体成员说明如下,其中括号内的文字是对应参数在 STM32 HAL 库中定义的宏
(1) Prescaler
本成员设置 CAN 外设的时钟分频,它可控制时间片 Tq 的时间长度,这里设置的值最终会减 1 后再写入 BRP 寄存器位,即前面介绍的 Tq 计算公式:
Tq = (BRP[9:0]+1) x TPCLK
等效于:Tq = CAN_Prescaler x TPCLK
(2) Mode
本成员设置 CAN 的工作模式,可设置为正常模式 (CAN_MODE_NORMAL)、回环模式 (CAN_MODE_LOOPBACK)、静默模式 (CAN_MODE_SILENT) 以及回环静默模式(CAN_MODE_SILENT_LOOPBACK)。
(3) SyncJumpWidth
本成员可以配置 SJW 的极限长度,即 CAN 重新同步时单次可增加或缩短的最大长度,它可以被配置为 1-4Tq(CAN_SJW_1/2/3/4tq)。
(4) TimeSeg1
本成员用于设置 CAN 位时序中的 BS1 段的长度,它可以被配置为 1-16 个 Tq 长度(CAN_BS1_1/2/3…16tq)。
(5) TimeSeg2
本成员用于设置 CAN 位时序中的 BS2 段的长度,它可以被配置为 1-8 个 Tq 长度(CAN_BS2_1/2/3…8tq)。SYNC_SEG、 BS1 段及 BS2 段的长度加起来即一个数据位的长度,即前面介绍的原来
计算公式:T1bit =1Tq+TS1+TS2=1+ (TS1[3:0] + 1)+ (TS2[2:0] + 1)
等效于:T1bit= 1Tq+CAN_BS1+CAN_BS2
(6) TimeTriggeredMode
本成员用于设置是否使用时间触发功能 (ENABLE/DISABLE),时间触发功能在某些CAN 标准中会使用到。
(7) AutoBusOff
本成员用于设置是否使用自动离线管理 (ENABLE/DISABLE),使用自动离线管理可以在节点出错离线后适时自动恢复,不需要软件干预。
(8) AutoWakeUp
本成员用于设置是否使用自动唤醒功能 (ENABLE/DISABLE),使能自动唤醒功能后它会在监测到总线活动后自动唤醒。
(9)此处与AutoBusOff重复(笔误)
本成员用于设置是否使用自动离线管理功能 (ENABLE/DISABLE),使用自动离线管理可以在出错时离线后适时自动恢复,不需要软件干预。
(10) AutoRetransmission
本成员用于设置是否使用自动重传功能 (ENABLE/DISABLE),使用自动重传功能时,会一直发送报文直到成功为止。
(11) ReceiveFifoLocked
本成员用于设置是否使用锁定接收 FIFO(ENABLE/DISABLE),锁定接收 FIFO 后,若FIFO 溢出时会丢弃新数据,否则在 FIFO 溢出时以新数据覆盖旧数据。
(12) TransmitFifoPriority
本成员用于设置发送报文的优先级判定方法 (ENABLE/DISABLE),使能时,以报文存入发送邮箱的先后顺序来发送,否则按照报文 ID 的优先级来发送。配置完这些结构体成员后,我们调用库函数 HAL_CAN_Init 即可把这些参数写入到 CAN 控制寄存器中,实现 CAN 的初始化
2.6.2 CAN 发送及接收结构体
在发送或接收报文时,需要往发送邮箱中写入报文信息或从接收 FIFO 中读取报文信息,利用STM32HAL 库的发送及接收结构体可以方便地完成这样的工作,它们的定义见代码清单 。代码清单 39‑2 CAN 发送及接收结构体
typedefstruct { uint32_tStdId;/*存储报文的标准标识符11位,0-0x7FF.*/ uint32_tExtId;/*存储报文的扩展标识符29位,0-0x1FFFFFFF.*/ uint32_tIDE;/*存储IDE扩展标志*/ uint32_tRTR;/*存储RTR远程帧标志*/ uint32_tDLC;/*存储报文数据段的长度,0-8*/ FunctionalStateTransmitGlobalTime; }CAN_TxHeaderTypeDef;
typedefstruct { uint32_tStdId;/*存储报文的标准标识符11位,0-0x7FF.*/ uint32_tExtId;/*存储报文的扩展标识符29位,0-0x1FFFFFFF.*/ uint32_tIDE;/*存储IDE扩展标志*/ uint32_tRTR;/*存储RTR远程帧标志*/ uint32_tDLC;/*存储报文数据段的长度,0-8*/ uint32_tTimestamp; uint32_tFilterMatchIndex; }CAN_RxHeaderTypeDef;
这些结构体成员, 说明如下:
(1) StdId
本成员存储的是报文的 11 位标准标识符,范围是 0-0x7FF。
(2) ExtId
本成员存储的是报文的 29 位扩展标识符,范围是 0-0x1FFFFFFF。ExtId 与 StdId 这两个成员根据下面的 IDE 位配置,只有一个是有效的。
(3) IDE
本成员存储的是扩展标志 IDE 位,当它的值为宏 CAN_ID_STD 时表示本报文是标准帧,使用 StdId 成员存储报文 ID;当它的值为宏 CAN_ID_EXT 时表示本报文是扩展帧,使用 ExtId 成员存储报文 ID。
(4) RTR
本成员存储的是报文类型标志 RTR 位,当它的值为宏 CAN_RTR_Data 时表示本报文是数据帧;当它的值为宏 CAN_RTR_Remote 时表示本报文是遥控帧,由于遥控帧没有数据段,所以当报文是遥控帧时,数据是无效的
(5) DLC
本成员存储的是数据帧数据段的长度,它的值的范围是 0-8,当报文是遥控帧时 DLC值为 0。
2.6.3 CAN 筛选器结构体
CAN 的筛选器有多种工作模式,利用筛选器结构体可方便配置,它的定义见代码清单 。代码清单CAN 筛选器结构体
typedefstruct { uint32_tFilterIdHigh;/*CAN_FxR1寄存器的高16位*/ uint32_tFilterIdLow;/*CAN_FxR1寄存器的低16位*/ uint32_tFilterMaskIdHigh;/*CAN_FxR2寄存器的高16位*/ uint32_tFilterMaskIdLow;/*CAN_FxR2寄存器的低16位*/ uint32_tFilterFIFOAssignment;/*设置经过筛选后数据存储到哪个接收FIFO*/ uint32_tFilterBank;/*筛选器编号,范围0-27,数据手册上说0-27是CAN1/CAN2共享,但是实测发现并不是这样,CAN1是0-13,CAN2是14-27*/ uint32_tFilterMode;/*筛选器模式*/ uint32_tFilterScale;/*设置筛选器的尺度*/ uint32_tFilterActivation;/*是否使能本筛选器*/ uint32_tSlaveStartFilterBank; }CAN_FilterTypeDef;
这些结构体成员都是“41.2.14 验收筛选器”小节介绍的内容,可对比阅读,各个结构体成员的介绍如下:
(1) FilterIdHigh
FilterIdHigh 成员用于存储要筛选的 ID,若筛选器工作在 32 位模式,它存储的是所筛选 ID 的高 16 位;若筛选器工作在 16 位模式,它存储的就是一个完整的要筛选的 ID。
(2) FilterIdLow
类似地,FilterIdLow 成员也是用于存储要筛选的 ID,若筛选器工作在 32 位模式,它存储的是所筛选 ID 的低 16 位;若筛选器工作在 16 位模式,它存储的就是一个完整的要筛选的 ID。
(3) FilterMaskIdHigh
FilterMaskIdHigh 存储的内容分两种情况,当筛选器工作在标识符列表模式时,它的功能与 FilterIdHigh 相同,都是存储要筛选的 ID;而当筛选器工作在掩码模式时,它存储的是 FilterIdHigh 成员对应的掩码,与 FilterIdLow 组成一组筛选器。
(4) FilterMaskIdLow
类似地, FilterMaskIdLow 存储的内容也分两种情况,当筛选器工作在标识符列表模式时,它的功能与 FilterIdLow 相同,都是存储要筛选的 ID;而当筛选器工作在掩码模式时,它存储的是 FilterIdLow 成员对应的掩码,与 FilterIdLow 组成一组筛选器。上面四个结构体的存储的内容很容易让人糊涂,请结合前面的图 39_0_15 和下面的表 39‑7 理解,如果还搞不清楚,再结合库函数 FilterInit 的源码来分析。
表不同模式下各结构体成员的内容
 对这些结构体成员赋值的时候,还要注意寄存器位的映射,即注意哪部分代表 STID,哪部分代表 EXID 以及 IDE、RTR 位。
对这些结构体成员赋值的时候,还要注意寄存器位的映射,即注意哪部分代表 STID,哪部分代表 EXID 以及 IDE、RTR 位。(5) FilterFIFOAssignment
本成员用于设置当报文通过筛选器的匹配后,该报文会被存储到哪一个接收 FIFO,它的可选值为 FIFO0 或 FIFO1(宏 CAN_FILTER_FIFO0/1)。
(6) FilterBank
本成员用于设置筛选器的编号,即本过滤器结构体配置的是哪一组筛选器,CAN 一共有 28 个筛选器,所以它的可输入参数范围为 0-27。
(7) FilterMode
本 成 员 用 于 设 置 筛 选 器 的 工 作 模 式, 可 以 设 置 为 列 表 模 式 (宏CAN_FILTERMODE_IDLIST) 及掩码模式 (宏 CAN_FILTERMODE_IDMASK)。
(8) FilterScale
本成员用于设置筛选器的尺度,可以设置为 32 位长 (宏 CAN_FILTERSCALE_32BIT)及 16 位长 (宏 CAN_FILTERSCALE_16BIT)。
(9) FilterActivation
本成员用于设置是否激活这个筛选器 (宏 ENABLE/DISABLE)。
三. CAN Cubemx配置
我们通过问题来熟悉下cubemx配置,你熟悉了这些问题基本就知道怎么配置了!
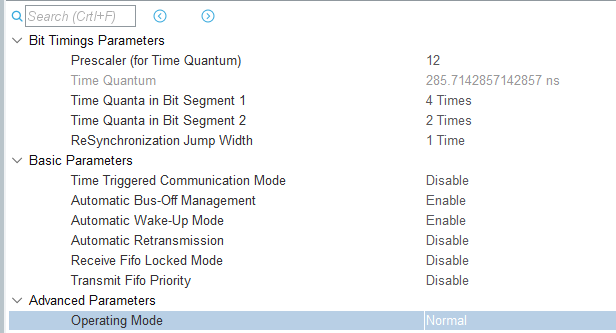
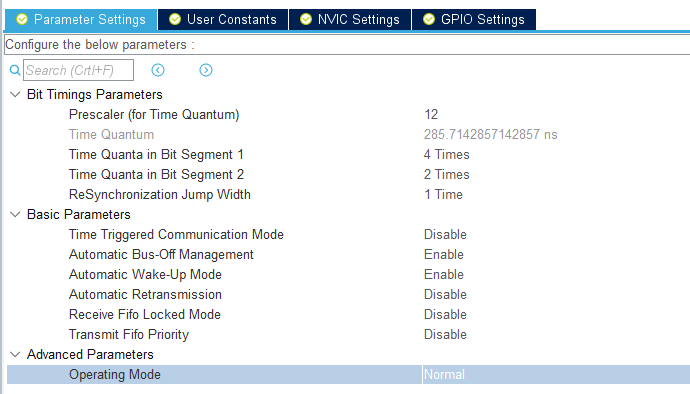
问题:Parameter Settings分别都是设置什么的?答案:如图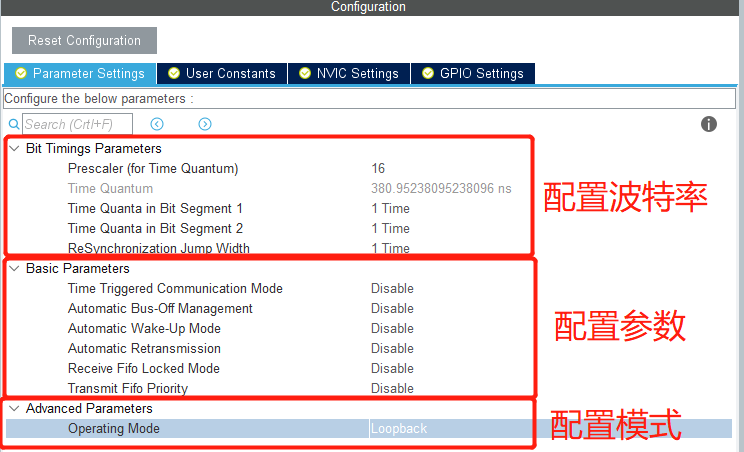 问题:怎么配置波特率呢?
问题:怎么配置波特率呢?答案:用我上面贴的工具(CAN波特率计算 f103AHP1_36M f407AHP1_42M 采样点软件有说明.rar)直接配置,举两个个例子
例子1:我们要配置成500KHz,那么我们这样配置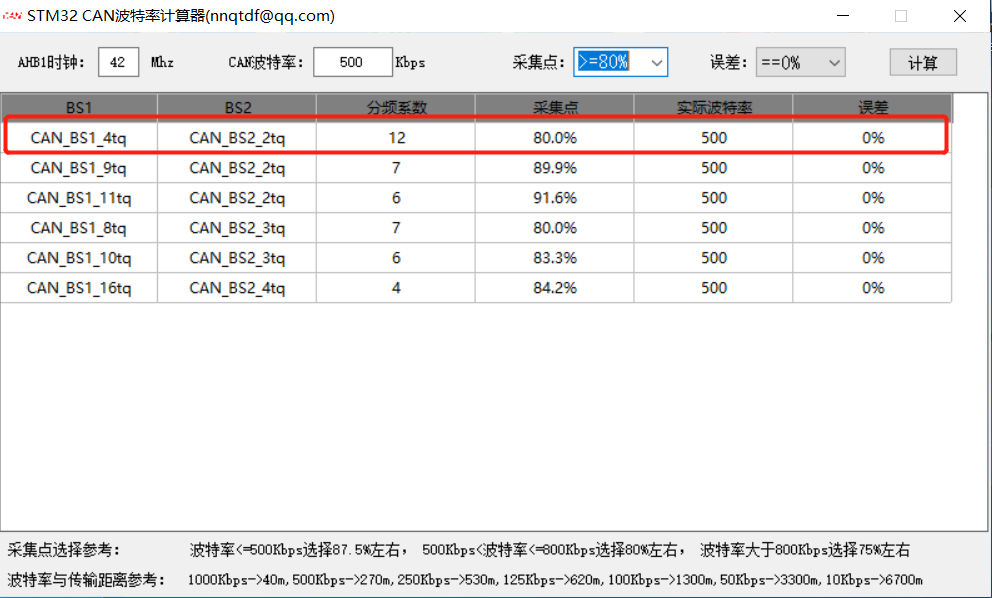
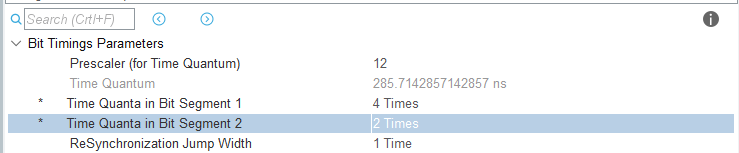 我们用采集点为80%,所以BS1为4tq,BS2为2tq,分频系数为12,代进公式Fpclk1/((CAN_BS1+CAN_BS2+1)*CAN_Prescaler)=42M/(4+2+1)/12=500kHz例子2:我们要配置成1M Hz,那么我们这样配置
我们用采集点为80%,所以BS1为4tq,BS2为2tq,分频系数为12,代进公式Fpclk1/((CAN_BS1+CAN_BS2+1)*CAN_Prescaler)=42M/(4+2+1)/12=500kHz例子2:我们要配置成1M Hz,那么我们这样配置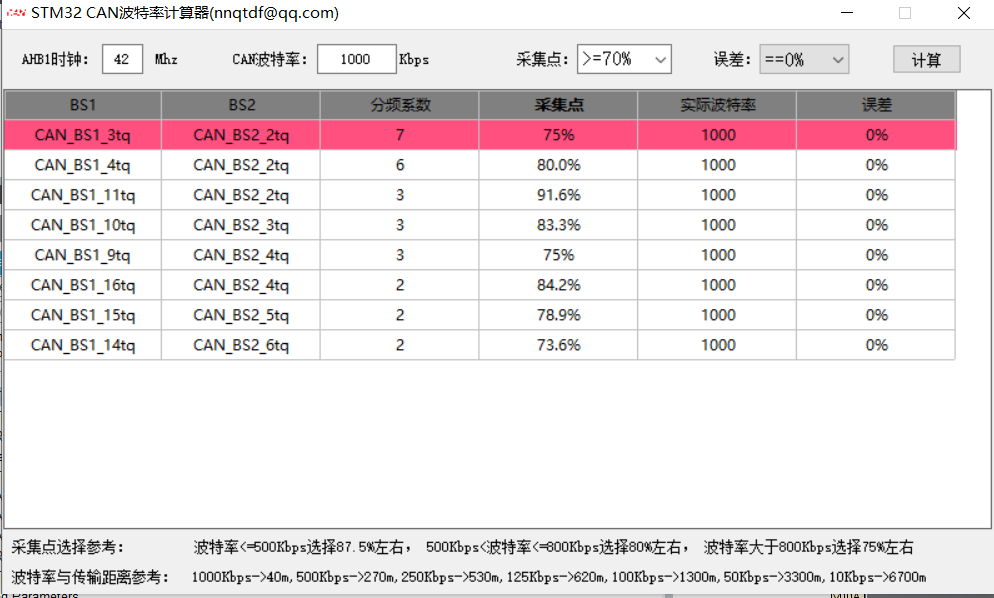 我们用采集点为75%,所以BS1为3tq,BS2为2tq,分频系数为7,代进公式Fpclk1/((CAN_BS1+CAN_BS2+1)*CAN_Prescaler)=42M/(3+2+1)/7=1MHz
我们用采集点为75%,所以BS1为3tq,BS2为2tq,分频系数为7,代进公式Fpclk1/((CAN_BS1+CAN_BS2+1)*CAN_Prescaler)=42M/(3+2+1)/7=1MHz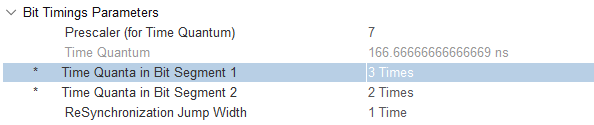 问题:Basic Parameter分别是啥意思呢?
问题:Basic Parameter分别是啥意思呢?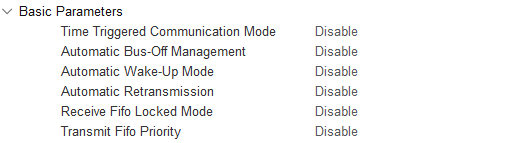 Timer Triggered Communication Mode:否使用时间触发功能 (ENABLE/DISABLE),时间触发功能在某些CAN 标准中会使用到。
Timer Triggered Communication Mode:否使用时间触发功能 (ENABLE/DISABLE),时间触发功能在某些CAN 标准中会使用到。Automatic Bus-Off Management:用于设置是否使用自动离线管理功能 (ENABLE/DISABLE),使用自动离线管理可以在出错时离线后适时自动恢复,不需要软件干预。
Automatic Wake-Up Mode:用于设置是否使用自动唤醒功能 (ENABLE/DISABLE),使能自动唤醒功能后它会在监测到总线活动后自动唤醒。
Automatic Retransmission:用于设置是否使用自动重传功能 (ENABLE/DISABLE),使用自动重传功能时,会一直发送报文直到成功为止。
Receive Fifo Locked Mode:用于设置是否使用锁定接收 FIFO(ENABLE/DISABLE),锁定接收 FIFO 后,若FIFO 溢出时会丢弃新数据,否则在 FIFO 溢出时以新数据覆盖旧数据。
Transmit Fifo Priority:用于设置发送报文的优先级判定方法 (ENABLE/DISABLE),使能时,以报文存入发送邮箱的先后顺序来发送,否则按照报文 ID 的优先级来发送。配置完这些结构体成员后,我们调用库函数 HAL_CAN_Init 即可把这些参数写入到 CAN 控制寄存器中,实现 CAN 的初始化
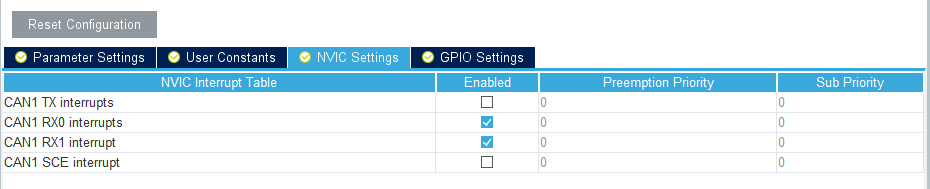
问题:为啥CAN分为RX0,RX1中断呢?

答案:STM32有2个3级深度的接收缓冲区:FIFO0和FIFO1,每个FIFO都可以存放3个完整的报文,它们完全由硬件来管理。如果是来自FIFO0的接收中断,则用CAN1_RX0_IRQn中断来处理。如果是来自FIFO1的接收中断,则用CAN1_RX1_IRQn中断来处理,如图:
问题:CAN SCE中断时什么?
 答案:status chanege error,错误和状态变化中断!
答案:status chanege error,错误和状态变化中断!四.CAN分析工具的使用
下面我们会用到CAN分析工具,还是比较好用的,此部分使用作为自己使用
https://www.zhcxgd.com/h-col-112.html
五. 实验
1.Normal模式测试500K 波特率(定时发送,轮询接收)
1.1 CubeMx配置

1.2 设置Filter过滤,我们只使能FIFO0,并且不过滤任何消息
uint8_tbsp_can1_filter_config(void)
{
CAN_FilterTypeDeffilter={0};
filter.FilterActivation=ENABLE;
filter.FilterMode=CAN_FILTERMODE_IDMASK;
filter.FilterScale=CAN_FILTERSCALE_32BIT;
filter.FilterBank=0;
filter.FilterFIFOAssignment=CAN_FILTER_FIFO0;
filter.FilterIdLow=0;
filter.FilterIdHigh=0;
filter.FilterMaskIdLow=0;
filter.FilterMaskIdHigh=0;
HAL_CAN_ConfigFilter(&hcan1,&filter);
returnBSP_CAN_OK;
}
1.3 开启CAN(注意,默认Cubemx生成的代码并没有can start)
HAL_CAN_Start(&hcan1);
1.4 编写发送函数
我们开出了几个参数,id_type是扩展帧还是标准帧,basic_id标准帧ID(在标准帧中有效),ex_id扩展帧ID(在扩展帧中有效),data要发送的数据,data_len要发送的数据长度
uint8_tbsp_can1_send_msg(uint32_tid_type,uint32_tbasic_id,uint32_tex_id,uint8_t*data,uint32_tdata_len)
{
uint8_tindex=0;
uint32_t*msg_box;
uint8_tsend_buf[8]={0};
CAN_TxHeaderTypeDefsend_msg_hdr;
send_msg_hdr.StdId=basic_id;
send_msg_hdr.ExtId=ex_id;
send_msg_hdr.IDE=id_type;
send_msg_hdr.RTR=CAN_RTR_DATA;
send_msg_hdr.DLC=data_len;
send_msg_hdr.TransmitGlobalTime=DISABLE;
for(index=0;index< data_len; index++)
send_buf[index] = data[index];
HAL_CAN_AddTxMessage(&hcan1,&send_msg_hdr,send_buf,msg_box);
returnBSP_CAN_OK;
}
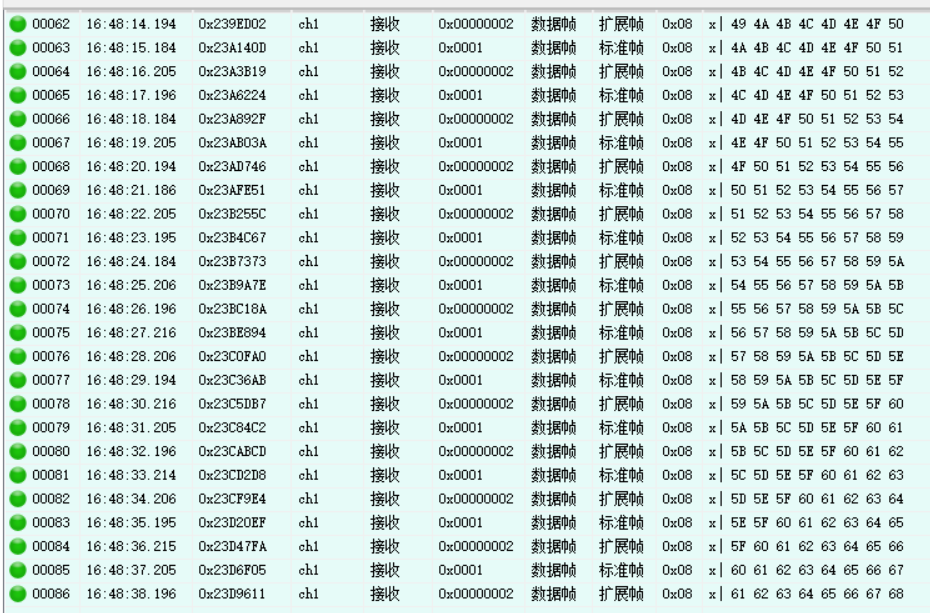
我们在main函数中1s发送一帧,标准帧跟扩展帧交叉调用,代码如下:
send_data[0]++;
send_data[1]++;
send_data[2]++;
send_data[3]++;
send_data[4]++;
send_data[5]++;
send_data[6]++;
send_data[7]++;
if(id_type_std==1)
{
bsp_can1_send_msg(CAN_ID_STD,1,2,send_data,8);
id_type_std=0;
}
else
{
bsp_can1_send_msg(CAN_ID_EXT,1,2,send_data,8);
id_type_std=1;
}
HAL_Delay(1000);
我们通过CAN协议分析仪来抓下结果
1.5 编写轮询接收函数
uint8_tbsp_can1_polling_recv_msg(uint32_t*basic_id,uint32_t*ex_id,uint8_t*data,uint32_t*data_len)
{
uint8_tindex=0;
uint8_trecv_data[8];
CAN_RxHeaderTypeDefheader;
while(HAL_CAN_GetRxFifoFillLevel(&hcan1,CAN_RX_FIFO0)!=0)
{
if(__HAL_CAN_GET_FLAG(&hcan1,CAN_FLAG_FOV0)!=RESET)
printf("[CAN]FIFO0overrun!
");
HAL_CAN_GetRxMessage(&hcan1,CAN_RX_FIFO0,&header,recv_data);
if(header.IDE==CAN_ID_STD)
{
printf("StdIdID:%d
",header.StdId);
}
else
{
printf("ExtIdID:%d
",header.ExtId);
}
printf("CANIDE:0x%x
",header.IDE);
printf("CANRTR:0x%x
",header.RTR);
printf("CANDLC:0x%x
",header.DLC);
printf("RECVDATA:");
for(index=0;index< header.DLC; index++)
{
printf("0x%x",recv_data[index]);
}
printf("
");
}
}
实验一总结:1.没用调用HAL_CAN_Start(&hcan1);使能CAN
2.没有编写Filter函数,我开始自认为不设置就默认不过滤,现在看来是我想多了,其实想想也合理,你如果不过滤分配FIFO,STM32怎么决定把收到的放到哪个FIFO中
待提升:
1.目前只用到FIFO0,待把FIFO1使用起来2.Normal模式测试500K 波特率(定时发送,中断接收)
2.1 CubeMx配置
步骤2,3,4跟polling完全一致,我们来直接说下中断怎么用(主要是使能notifity就行了)
staticvoidMX_CAN1_Init(void)
{
/*USERCODEBEGINCAN1_Init0*/
/*USERCODEENDCAN1_Init0*/
/*USERCODEBEGINCAN1_Init1*/
/*USERCODEENDCAN1_Init1*/
hcan1.Instance=CAN1;
hcan1.Init.Prescaler=12;
hcan1.Init.Mode=CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth=CAN_SJW_1TQ;
hcan1.Init.TimeSeg1=CAN_BS1_4TQ;
hcan1.Init.TimeSeg2=CAN_BS2_2TQ;
hcan1.Init.TimeTriggeredMode=DISABLE;
hcan1.Init.AutoBusOff=ENABLE;
hcan1.Init.AutoWakeUp=ENABLE;
hcan1.Init.AutoRetransmission=DISABLE;
hcan1.Init.ReceiveFifoLocked=DISABLE;
hcan1.Init.TransmitFifoPriority=DISABLE;
if(HAL_CAN_Init(&hcan1)!=HAL_OK)
{
Error_Handler();
}
/*USERCODEBEGINCAN1_Init2*/
bsp_can1_filter_config();
HAL_CAN_Start(&hcan1);
HAL_CAN_ActivateNotification(&hcan1,CAN_IT_RX_FIFO0_MSG_PENDING);
/*USERCODEENDCAN1_Init2*/
}
下面我们来编写下中断函数
voidHAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef*hcan)
{
uint8_tindex=0;
uint8_trecv_data[8];
CAN_RxHeaderTypeDefheader;
HAL_CAN_GetRxMessage(&hcan1,CAN_RX_FIFO0,&header,recv_data);
if(header.IDE==CAN_ID_STD)
{
printf("StdIdID:%d
",header.StdId);
}
else
{
printf("ExtIdID:%d
",header.ExtId);
}
printf("CANIDE:0x%x
",header.IDE);
printf("CANRTR:0x%x
",header.RTR);
printf("CANDLC:0x%x
",header.DLC);
printf("RECVDATA:");
for(index=0;index< header.DLC; index++)
{
printf("0x%x",recv_data[index]);
}
printf("
");
}
-
通信协议
+关注
关注
28文章
881浏览量
40303 -
CAN
+关注
关注
57文章
2744浏览量
463648 -
STM32
+关注
关注
2270文章
10897浏览量
355820
原文标题:学习CAN通信协议(下)--实例讲解
文章出处:【微信号:汽车电子嵌入式,微信公众号:汽车电子嵌入式】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
CAN总线通信协议的基础知识

STM32 CAN通信协议
CAN串行通信协议
CAN通信协议简析
SPI通信协议讲解相关资料推荐
SPI通信协议讲解






 工商网监
工商网监
评论