 博途:使用STL函数控制传送带
博途:使用STL函数控制传送带
步骤
要创建 STL 函数块“STL-Conveyor”,请按以下步骤操作:
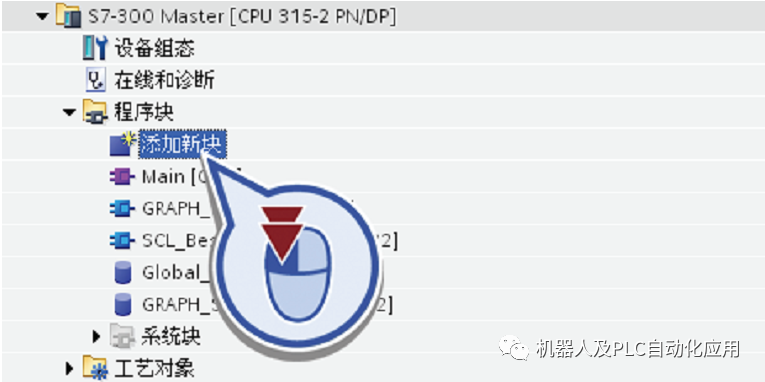
1. 打开项目树中的“程序块” 文件夹。
2. 双击“添加新块”。
3. 要添加一个函数:
– 单击“函数”。
– 指定块名称“STL-Conveyor”。
– 选择类型“STL” 。
– 单击“确定”。

4. 保存项目。
结果
成功创建了 STL 函数“STL-Conveyor”。 程序编辑器将自动打开。
定义 STL 函数的接口
步骤
要定义接口,请按以下步骤操作:
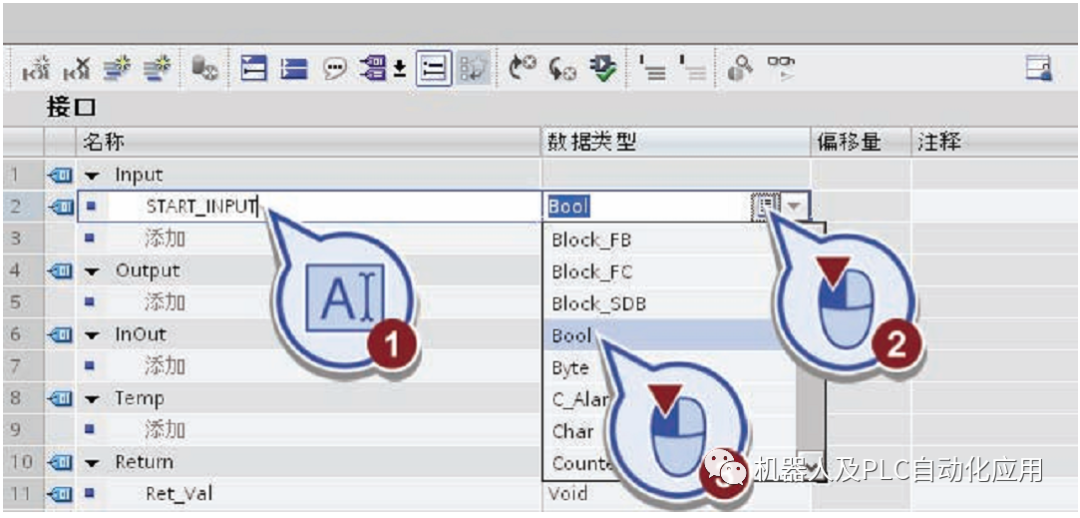
1. 在“Input” 部分定义带有以下属性的输入参数:
– 名称:"START_INPUT"
– 数据类型:"Bool"
使用此参数激活传送带。
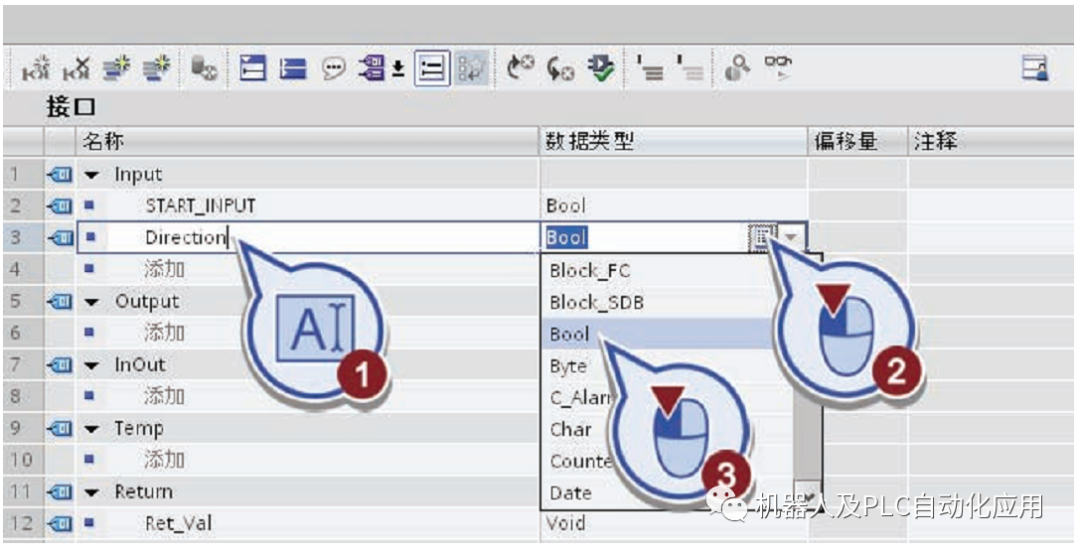
2. 在“Input” 部分定义带有以下属性的第二个输入参数:
– 名称:"Direction"
– 数据类型:"Bool"
此参数用于判断传送带的移动方向。
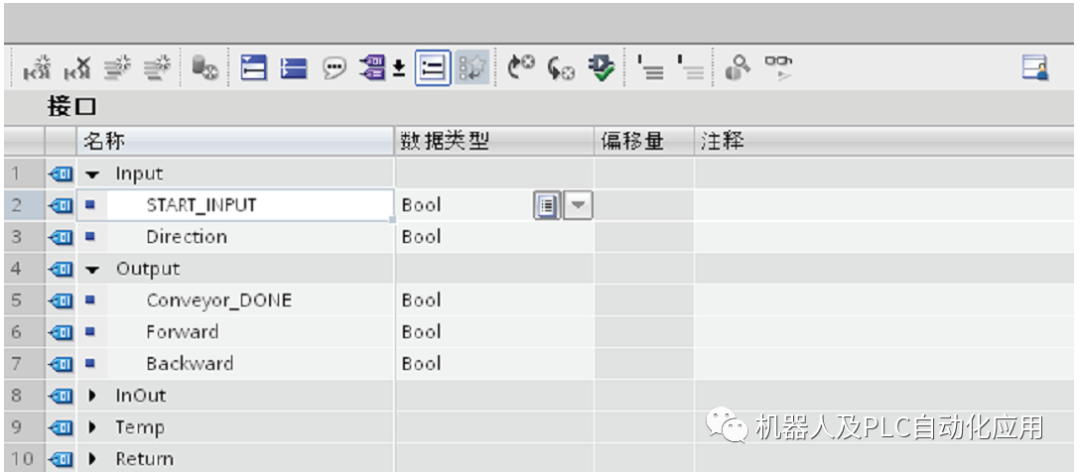
3. 在“Output” 部分定义带有以下属性的输出参数:
– 名称:"Conveyor_DONE"
– 数据类型:"Bool"
使用此参数查询传送带是否已激活。
4. 在“Output” 部分定义带有以下属性的第二个输出参数:
– 名称:"Forward"
– 数据类型:"Bool"
此参数用于控制传送带向前移动。
5. 在“Output” 部分定义带有以下属性的第三个输出参数:
– 名称:"Backward"
– 数据类型:"Bool"
此参数用于控制传送带向后移动。
6. 保存项目。
结果
在 STL 函数的接口中成功定义了所有必需参数。
在以下部分中,将编写控制传送带的 STL 函数。 要执行此操作,需要三个程序段:
● 在第一个程序段中,判断传送带是否向前移动。
– 为此,需要置位两个输入参数“START_INPUT” 和“Direction” 。
– 如果传送带向前移动,则置位输出“Forward”。
– 同时复位输出“Conveyor_DONE”,表示传送带处于活动状态。
● 在第二个程序段中,判断传送带是否向后移动。
– 要执行此操作,首先要查询是否置位了输入参数“START_INPUT” 以及输入参数“Direction” 是否没有置位。
– 如果是,则置位输出“Backward”。
– 同时复位输出“Conveyor_DONE”,表示传送带处于活动状态。
● 在第三个程序段中,查询是否没有置位输入参数“START_INPUT” 。 如果没有置位,则将复位控制传送带的两个输出,并置位输出“Conveyor_DONE”。
步骤
要编写 STL 函数,请按以下步骤操作:
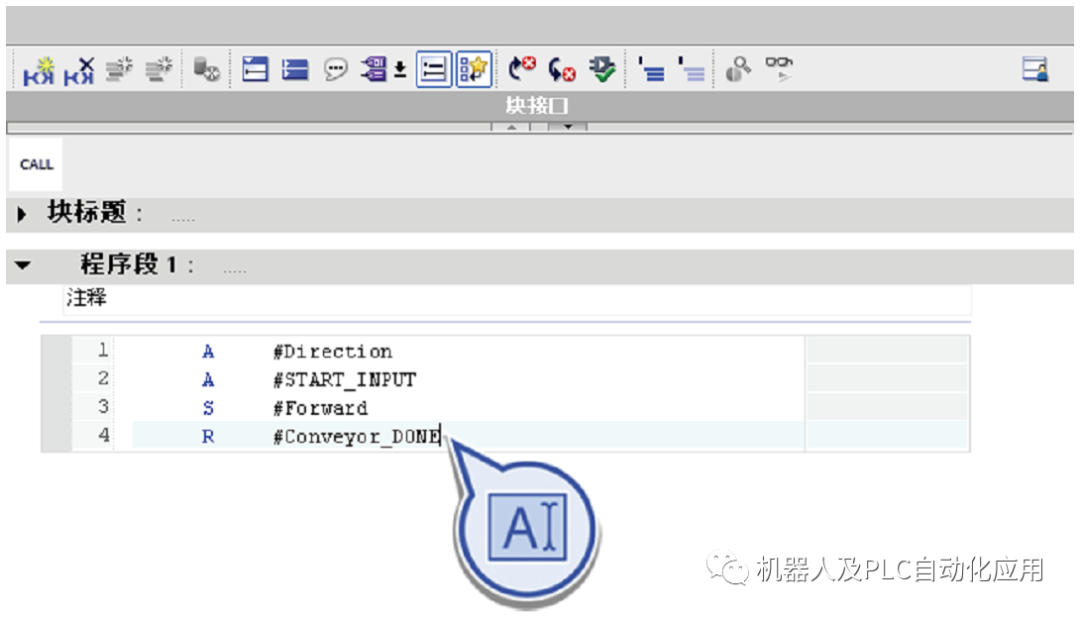
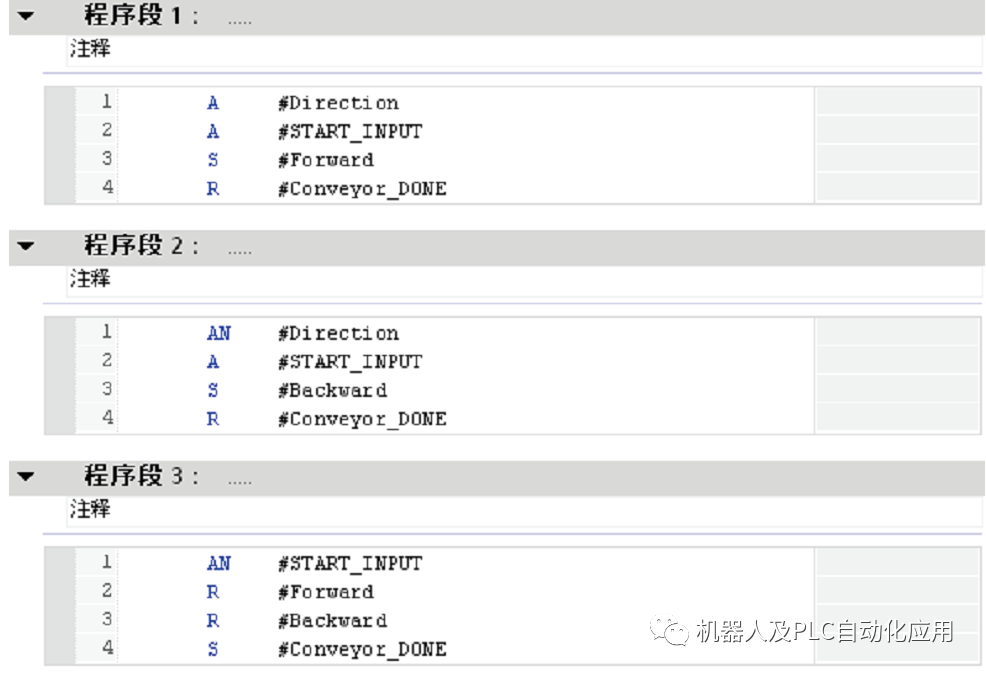
1. 定义程序段 1 的程序代码:
– 1. 行:"A #Direction"
– 2. 行:"A #START_INPUT"
– 3. 行:"S #Forward"
– 4. 行:"R #Conveyor_DONE"
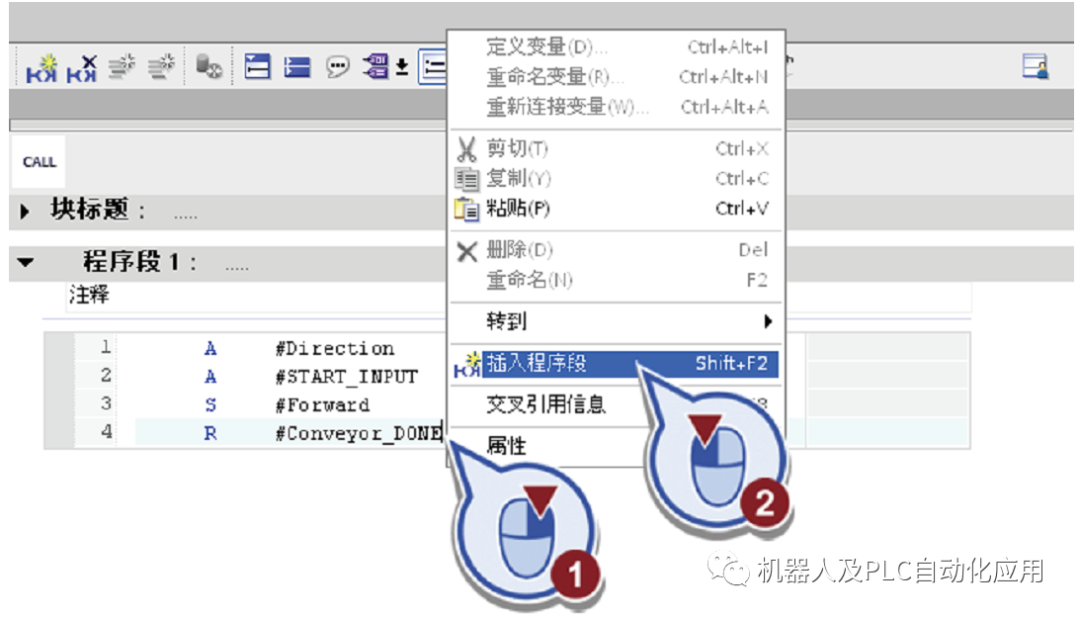
2. 在程序编辑器的一块空白区域中右键单击,然后从快捷菜单中选择“插入程序段”插入第二个程序段。
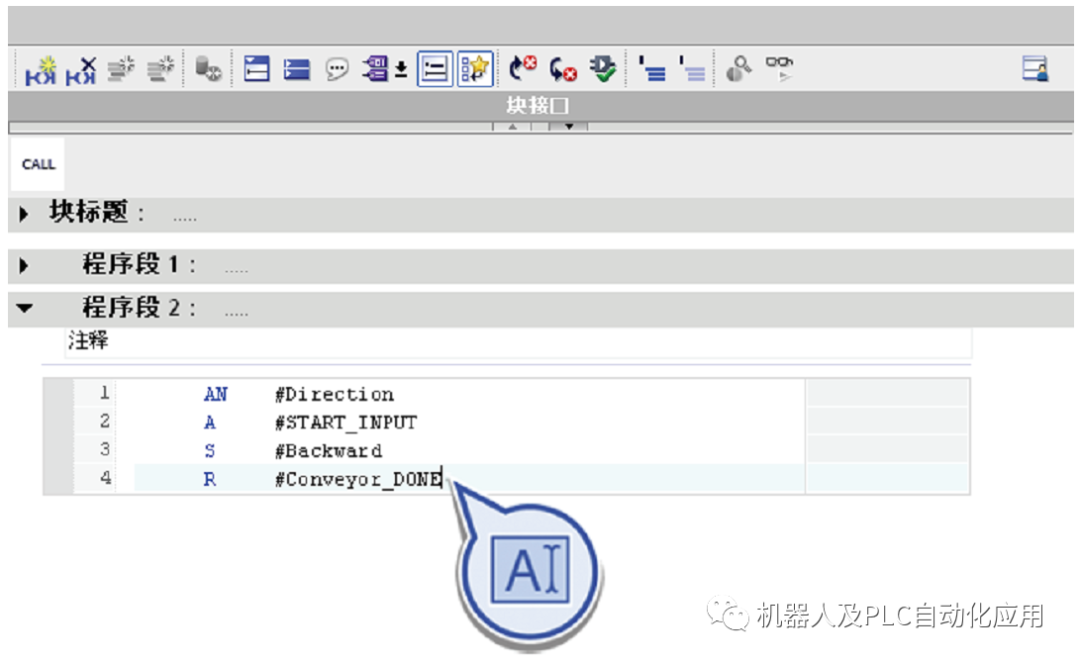
3. 定义程序段 2 的程序代码:
– 1. 行:"AN #Direction"
– 2. 行:"A #START_INPUT"
– 3. 行:"S #Backward"
– 4. 行:"R #Conveyor_DONE"
4. 通过按下组合键
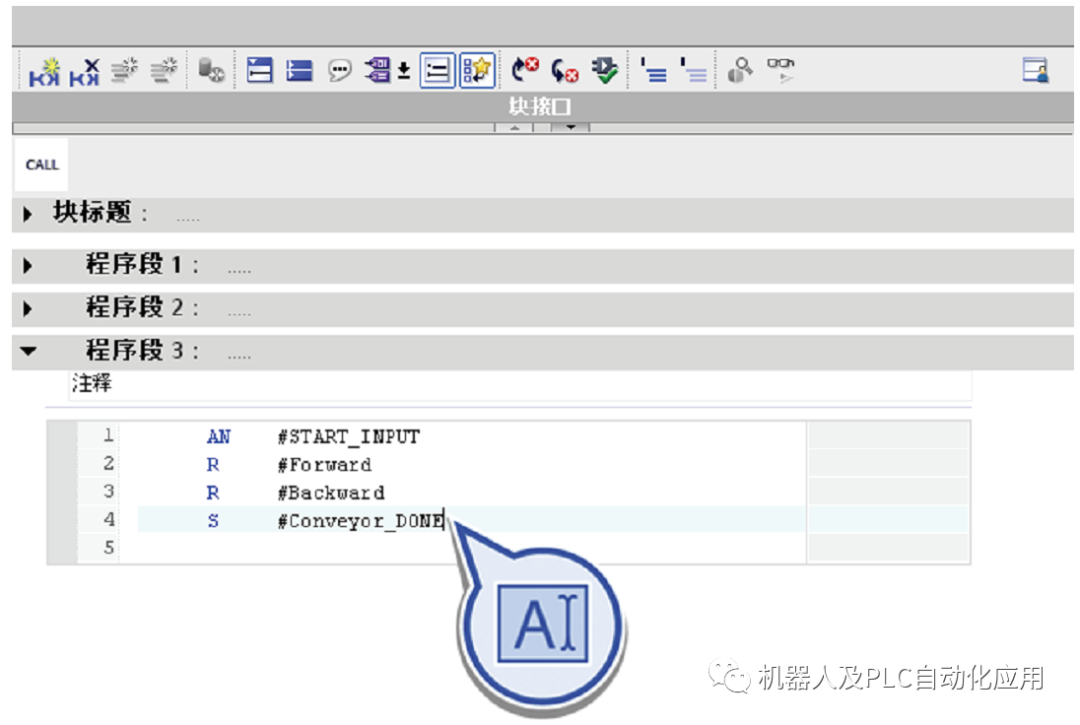
5. 定义程序段 3 的程序代码:
– 1. 行:"AN #START_INPUT"
– 2. 行:"R #Forward"
– 3. 行:"R #Backward"
– 4. 行:"S #Conveyor_DONE"
6. 保存项目。
结果
成功编写了控制传送带的 STL 函数。
-
接口
+关注
关注
33文章
8588浏览量
151096 -
函数
+关注
关注
3文章
4329浏览量
62588 -
STL
+关注
关注
0文章
86浏览量
18322
原文标题:博途:使用 STL 函数控制传送带
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何用Labview做传送带动画
如何实现单片机货物传送带检测设计
海为C60S2R在同步传送带中的应用
通过YMD系列超级节能变频器实现传送带的节能设计
橡胶传送带破损划伤可以修复再使用吗
详解非直线传送带动态跟踪威廉希尔官方网站
26-基于单片机的传送带计数系统

矿山传送带导向辊轴承位磨损的修复指南
西门子1200PLC 传送带控制程序编写及思路
STL检测传送带传送方向的示例






 工商网监
工商网监
评论