 CW32单片机I2C接口读写EEPROM芯片介绍
CW32单片机I2C接口读写EEPROM芯片介绍
一、概述
CW32L083 内部集成 2 个 I2C 控制器,能按照设定的传输速率(标准,快速,高速)将需要发送的数据按照 I2C 规范串行发送到 I2C 总线上,或从总线上接收数据,并对通信过程中的状态进行检测,另外还支持多主机通信中的总线冲突和仲裁处理。
二、主要功能
• 支持主机发送 / 接收,从机发送 / 接收四种工作模式
• 支持时钟延展 ( 时钟同步 ) 和多主机通信冲突仲裁
• 支持标准 (100Kbps)/ 快速 (400Kbps)/ 高速 (1Mbps) 三种工作速率
• 支持 7bit 寻址功能
• 支持 3个从机地址
• 支持广播地址
• 支持输入信号噪声过滤功能
• 支持中断状态查询功能
1.协议介绍
I2C 总线使用两根信号线(数据线 SDA 和时钟线 SCL)在设备间传输数据。SCL 为单向时钟线,固定由主机驱动。SDA 为双向数据线,在数据传输过程中由收发两端分时驱动。I2C 总线上可以连接多个设备,所有设备在没有进行数据传输时都处于空闲状态(未寻址从机接收模式),任一设备都可以作为主机发送 START 起始信号来开始数据传输,在 STOP 停止信号出现在总线上之前,总线一直处于 被占用状态。I2C 通信采用主从结构,并由主机发起和结束通信。主机通过发送 START 起始信号来发起通信,之后发送 SLA+W/R 共 8bit 数据(其中,SLA 为 7bit 从机地址,W/R 为读写位),并在第 9个SCL 时钟释放 SDA 总线, 对应的从机在第 9个SCL 时钟占用 SDA 总线并输出 ACK 应答信号,完成从机寻址。此后根据主机发送的第 1 字 节的 W/R 位来决定数据通信的发端和收端,发端每发送 1个字节数据,收端必须回应 1个ACK 应答信号。数据传输完成后,主机发送 STOP 信号结束本次通信。
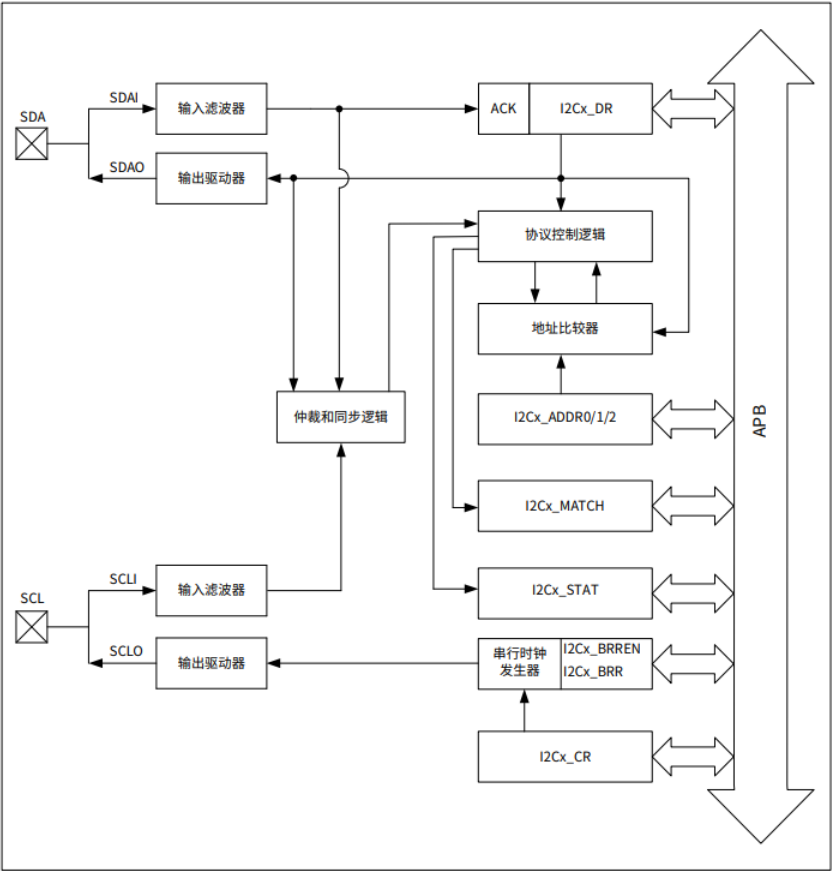
2.功能框图
I2C 模块主要包括时钟发生器、输入滤波器、地址比较器、协议控制逻辑、仲裁和同步逻辑、以及相关寄存器等。
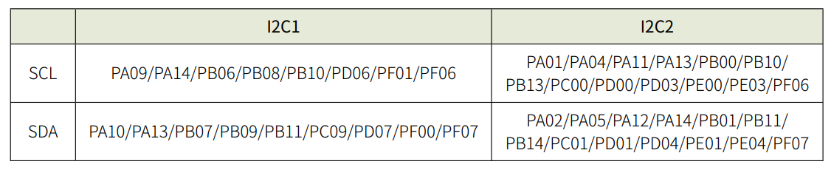
CW32L083 支持用户灵活选择 GPIO 作为 I2C 通信引脚,如下表所示:
3.I2C中断
I2C 控制寄存器 I2Cx_CR 的 SI 位域为中断标志位。当 I2C 状态寄存器 I2Cx_STAT 的 STAT 位域值发生改变(变成 0xF8 除外)时,I2Cx_CR.SI 标志位就会被置位,同时产生中断请求。在用户 I2C 中断服务程序中,应查询 I2C 状态寄存器 I2Cx_STAT 的 STAT 位域值获取 I2C 总线的状态,以确定中断产生原因。设置 I2Cx_CR.SI 为 0 清除该标志位。
4.工作模式
I2C 控制器支持 4 种工作模式:主机发送模式、主机接收模式、从机发送模式、从机接收模式。另外还支持广播 接收模式,其工作方式和从机接收模式类似。
1.功能简介
CW24C02是一个2Kbit的串行EEPROM存储芯片,可存储256个字节数据。芯片内部分为32页,每页8字节。工作电压范围为1.7V到5.5V,I2C接口时钟频率为 1MHz (5V,3V),400 KHz (1.7V)。器件地址为1010 A2 A1 A0,对于我们单板A2 A1 A0引脚全部接GND,故器件地址为1010000,即0x50。器件内部存储空间地址长度8 bit。
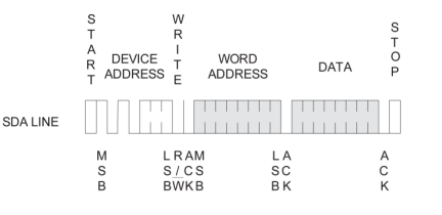
2.读写时序
字节写操作时序:起始信号+器件地址(7bit)+读写指示(1bit)+存储空间地址(8bit)+写入数据(8bit)+停止信号,即可完成指定字节写入操作。
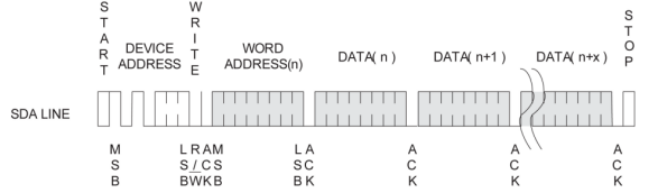
页写操作时序:起始信号+器件地址(7bit)+读写指示(1bit)+存储空间地址(8bit)+写入数据(8bit*8)+停止信号,即可完成指定地址(必须是页起始地址)的页写入操作。
随机读操作时序:起始信号+器件地址(7bit)+读写指示(1bit)+存储空间地址(8bit)+重复起始信号+器件地址(7bit)+读写指示(1bit),之后器件会返回1字节数据,主机收到后发送停止信号,即可完成指定字节读取操作。
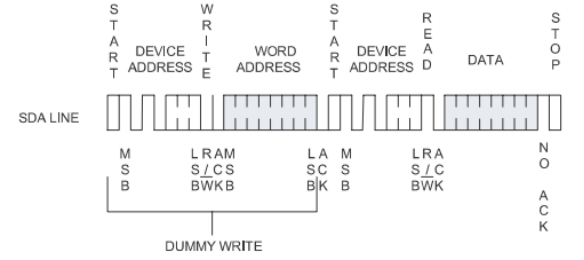
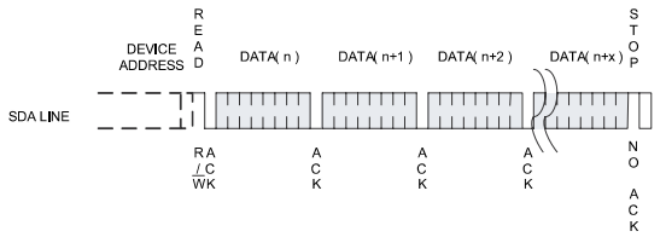
顺序读操作时序:和随机读时序类似,只是在主机接收到1字节数据后,不发送停止信号,而是继续发送时钟进行下一个字节数据的接收,直到所有所需读取的数据全部读取,之后再发送停止信号。
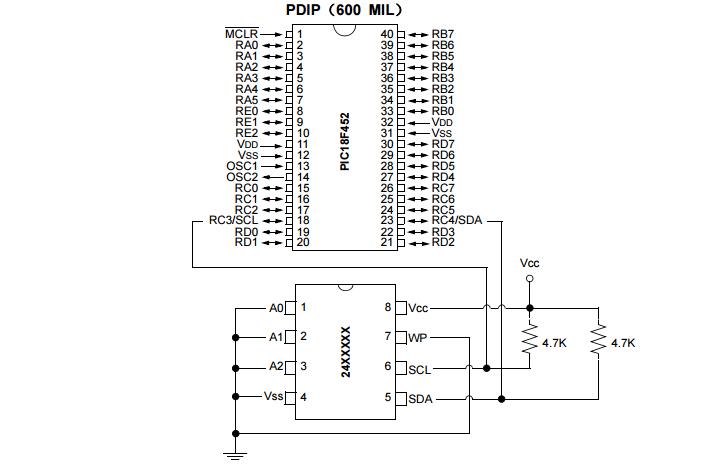
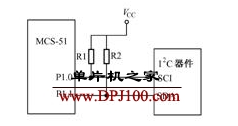
四、硬件连接
如下图所示,MCU和EEPROM通过I2C总线互连。
五、实例演示:MCU采用页写和顺序读操作时序完成EERPOM的访问。
1.I2C读写EEPROM芯片中断函数(I2C分为I2C1和I2C2)
voidI2c1EepromReadWriteInterruptFunction(void) { u8State=I2C_GetState(CW_I2C1);//I2C:获取状态寄存器函数 switch(u8State) { case0x08://发送完START信号 I2C_GenerateSTART(CW_I2C1,DISABLE);//发送START信号 I2C_Send7bitAddress(CW_I2C1,I2C_SLAVEADDRESS,0X00);//做主时发送从机地址字节 break; case0x10://发送完重复起始信号 I2C_GenerateSTART(CW_I2C1,DISABLE); if(0==SendFlg) { I2C_Send7bitAddress(CW_I2C1,I2C_SLAVEADDRESS,0X00);//写命令 } else { I2C_Send7bitAddress(CW_I2C1,I2C_SLAVEADDRESS,0X01);//读命令,eeprom随机读 } break; case0x18://发送完SLA+W/R字节 I2C_GenerateSTART(CW_I2C1,DISABLE); I2C_SendData(CW_I2C1,u8Addr);//发送访问EEPROM的目标地址字节 break; case0x20://发送完SLA+W后从机返回NACK case0x38://主机在发送SLA+W阶段或者发送数据阶段丢失仲裁或者主机在发送SLA+R阶段或者回应NACK阶段丢失仲裁 case0x30://发送完一个数据字节后从机返回NACK case0x48://发送完SLA+R后从机返回NACK I2C_GenerateSTOP(CW_I2C1,ENABLE); I2C_GenerateSTART(CW_I2C1,ENABLE); break; case0x58://接收到一个数据字节,且NACK已回复 u8Recdata[u8RecvLen++]=I2C_ReceiveData(CW_I2C1);//所有数据读取完成,NACK已发送 receivedflag=1; I2C_GenerateSTOP(CW_I2C1,ENABLE);//发送停止条件 break; case0x28://发送完1字节数据:发送EEPROM中memory地址也会产生,发送后面的数据也会产生 if(0==SendFlg) { if(u8SendLenCR_f.STA=1;//setstart//发送重复START信号,START生成函数改写后,会导致0X10状态被略过,故此处不调用函数 I2C_GenerateSTOP(CW_I2C1,DISABLE); } break; case0x40://发送完SLA+R信号,开始接收数据 u8RecvLen=0; if(READLEN>1) { I2C_AcknowledgeConfig(CW_I2C1,ENABLE);//读取数据超过1个字节才发送ACK } break; case0x50://接收完一字节数据,在接收最后1字节数据之前设置AA=0; u8Recdata[u8RecvLen++]=I2C_ReceiveData(CW_I2C1); if(u8RecvLen==READLEN-1) { I2C_AcknowledgeConfig(CW_I2C1,DISABLE);; } break; } I2C_ClearIrq(CW_I2C1); }
2.设置系统时钟
voidRCC_Configuration(void)
{
CW_SYSCTRL->APBEN1_f.I2C1=1U;
}
3.设置GPIO口
voidGPIO_Configuration(void)
{
GPIO_InitTypeDefGPIO_InitStructure={0};
CW_SYSCTRL->AHBEN_f.GPIOA=1;
CW_SYSCTRL->AHBEN_f.GPIOB=1;
CW_SYSCTRL->AHBEN_f.GPIOC=1;
CW_SYSCTRL->AHBEN_f.GPIOD=1;
CW_SYSCTRL->AHBEN_f.GPIOE=1;
CW_SYSCTRL->AHBEN_f.GPIOF=1;
PB10_AFx_I2C1SCL();
PB11_AFx_I2C1SDA();
GPIO_InitStructure.Pins=I2C1_SCL_GPIO_PIN|I2C1_SDA_GPIO_PIN;
GPIO_InitStructure.Mode=GPIO_MODE_OUTPUT_OD;
GPIO_Init(I2C1_SCL_GPIO_PORT, GPIO_InitStructure);
}
4.配置嵌套矢量中断控制器
voidNVIC_Configuration(void)
{
__disable_irq();
NVIC_EnableIRQ(I2C1_IRQn);
__enable_irq();
}
voidI2C1_IRQHandler(void)
{
I2c1EepromReadWriteInterruptFunction();
}
5.定义常量
#defineI2C1_SCL_GPIO_PORTCW_GPIOB #defineI2C1_SCL_GPIO_PINGPIO_PIN_10 #defineI2C1_SDA_GPIO_PORTCW_GPIOB #defineI2C1_SDA_GPIO_PINGPIO_PIN_11 //EEPROM内部地址 uint8_tu8Addr=0x00;//地址字节 #defineWRITELEN8//写数据长度 #defineREADLEN8//读数据长度 #defineWriteReadCycle35//写读次数,每次写入数据为n+i(n为次数,i=0~7) uint8_tu8Senddata[8]={0x66,0x02,0x03,0x04,0x05,0x60,0x70,0x20}; uint8_tu8Senddata2[8]={0x55,0xAA,0xAA,0x55,0x55,0xAA,0x55,0xAA}; uint8_tu8Recdata[16]={0x00}; uint8_tu8SendLen=0; uint8_tu8RecvLen=0; uint8_tSendFlg=0,Comm_flg=0; uint8_tu8recvflg=0; uint8_tu8State=0; uint8_treceivedflag=0;//读取完成标志
6.主程序:利用I2C接口,采用中断方式读写EEPROM芯片(CW24C02)。
int32_tmain(void)
{
I2C_InitTypeDefI2C_InitStruct={0};
uint16_ttempcnt=0;
RCC_Configuration();//时钟初始化
GPIO_Configuration();//IO口初始化
//I2C初始化
I2C_InitStruct.I2C_Baud=0x01;//500K=(8000000/(8*(1+1)),波特率计数器配置
I2C_InitStruct.I2C_BaudEn=ENABLE;//波特率计数器使能
I2C_InitStruct.I2C_FLT=DISABLE;//=WriteReadCycle)//测试次数完成,退出
{
break;
}
}
while(1);
}
7.程序流程
程序完成I2C主设备配置后,先将u8Senddata数组中的内容写入到EEPROM的第1页(CW24C02每页8字节):发送START信号后,I2C模块会产生状态改变中断,在中断服务程序中根据不同状态值进行不同处理,直到完成CW24C02的页写模式所有数据字节以及STOP信号发送,发送完成后置写操作流程完成标志。主循环中判断到写操作流程完成后,启动从EERROM的第1页数据读取流程:发送启动信号后,I2C模块会产生状态改变中断,在中断服务程序中根据不同状态值进行不同处理,直到完成CW24C02的顺序读模式所有数据字节发送及读取,在发送完STOP信号后置读操作流程完成标志。主循环中判断读操作流程完成后,初始化u8Senddata数组内容,重复下一次测试过程。完成WriteReadCycle变量设置的测试次数后退出。
来源:武汉芯源半导体
审核编辑:汤梓红
-
单片机
+关注
关注
6035文章
44554浏览量
634689 -
EEPROM
+关注
关注
9文章
1019浏览量
81562 -
I2C接口
+关注
关注
1文章
125浏览量
25190
发布评论请先 登录
相关推荐
CW32单片机I2C接口读写EEPROM芯片介绍
PIC单片机读写I2C实例源程序一
I2C—读写EEPROM
MSP430系列单片机与I2C总线方式的EEPROM接口

使用C18编译器和MSSP模块进行I2C™串行EEPROM与PIC18单片机的接口设计
应广单片机系列——用I2C接口读写EEPROM
AT89S52单片机并行端口模拟I2C总线协议读写AT24C04的设计
使用单片机实现I2C接口存储器AT24C04的读写与显示的C语言实例
STM32学习之I2C协议(读写EEPROM)







 工商网监
工商网监
评论