 OpenHarmony:如何使用HDF平台驱动控制I2C
OpenHarmony:如何使用HDF平台驱动控制I2C
1、程序介绍
本程序是基于OpenHarmony标准系统编写的平台驱动案例:I2C
目前已在凌蒙派-RK3568开发板跑通。
2、基础知识
2.1、I2C简介
I2C(Inter Integrated Circuit)总线是由Philips公司开发的一种简单、双向二线制同步串行总线。由于其硬件连接简单、成本低廉,因此被广泛应用于各种短距离通信的场景。
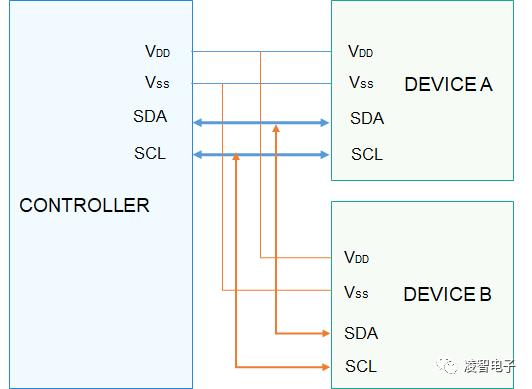
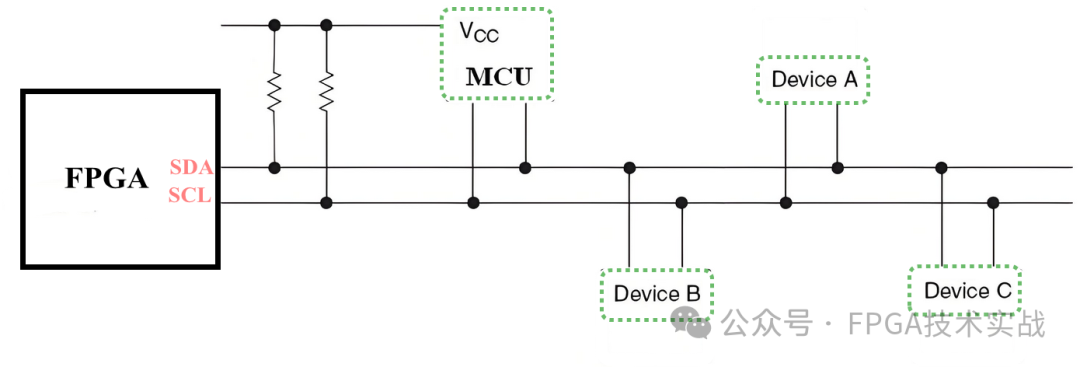
I2C以主从方式工作,通常有一个主设备和一个或者多个从设备,主从设备通过SDA(SerialData)串行数据线以及SCL(SerialClock)串行时钟线两根线相连(如图1)。
I2C数据的传输必须以一个起始信号作为开始条件,以一个结束信号作为传输的停止条件。数据传输以字节为单位,高位在前,逐个bit进行传输。
I2C总线上的每一个设备都可以作为主设备或者从设备,而且每一个设备都会对应一个唯一的地址,当主设备需要和某一个从设备通信时,通过广播的方式,将从设备地址写到总线上,如果某个从设备符合此地址,将会发出应答信号,建立传输。
I2C接口定义了完成I2C传输的通用方法集合,包括:
I2C控制器管理:打开或关闭I2C控制器
I2C消息传输:通过消息传输结构体数组进行自定义传输
I2C物理连线示意图
2.2、I2C驱动开发
2.2.1、I2C驱动开发接口
为了保证上层在调用I2C接口时能够正确的操作硬件,核心层在//drivers/hdf_core/framework/support/platform/include/i2c/i2c_core.h中定义了以下钩子函数。驱动适配者需要在适配层实现这些函数的具体功能,并与这些钩子函数挂接,从而完成接口层与核心层的交互。
I2cMethod和I2cLockMethod定义:struct I2cMethod { int32_t (*transfer)(struct I2cCntlr *cntlr, struct I2cMsg *msgs, int16_t count);};
struct I2cLockMethod { // 锁机制操作结构体 int32_t (*lock)(struct I2cCntlr *cntlr); void (*unlock)(struct I2cCntlr *cntlr);};
在适配层中,I2cMethod必须被实现,I2cLockMethod可根据实际情况考虑是否实现。核心层提供了默认的I2cLockMethod,其中使用mutex作为保护临界区的锁:
static int32_t I2cCntlrLockDefault(struct I2cCntlr *cntlr){ if (cntlr == NULL) { return HDF_ERR_INVALID_OBJECT; } return OsalMutexLock(&cntlr->lock);}
static void I2cCntlrUnlockDefault(struct I2cCntlr *cntlr){ if (cntlr == NULL) { return; } (void)OsalMutexUnlock(&cntlr->lock);}
static const struct I2cLockMethod g_i2cLockOpsDefault = { .lock = I2cCntlrLockDefault, .unlock = I2cCntlrUnlockDefault,};
若实际情况不允许使用mutex(例如使用者可能在中断上下文调用I2C接口,mutex可能导致休眠,而中断上下文不允许休眠)时,驱动适配者可以考虑使用其他类型的锁来实现一个自定义的I2cLockMethod。一旦实现了自定义的I2cLockMethod,默认的I2cLockMethod将被覆盖。
I2cMethod结构体成员函数功能说明:
 I2cLockMethod结构体成员函数功能说明:
I2cLockMethod结构体成员函数功能说明:

2.2.2、I2C驱动开发步骤
I2C模块适配HDF框架包含以下四个步骤:
实例化驱动入口。
配置属性文件。
实例化I2C控制器对象。
驱动调试。
我们以///drivers/hdf_core/adapter/khdf/linux/platform/i2c/i2c_adapter.c为例(该I2C驱动是建立于Linux I2C子系统基础上创建)。
2.2.2.1、驱动实例化驱动入口
I2C控制器会出现很多个设备挂接的情况,因而在HDF框架中首先会为此类型的设备创建一个管理器对象,并同时对外发布一个管理器服务来统一处理外部访问。这样,用户需要打开某个设备时,会先获取到管理器服务,然后管理器服务根据用户指定参数查找到指定设备。
I2C管理器服务的驱动由核心层实现,驱动适配者不需要关注这部分内容的实现,但在实现Init函数的时候需要调用核心层的I2cCntlrAdd函数,它会实现相应功能。
I2C驱动入口开发参考:
struct HdfDriverEntry g_i2cLinuxDriverEntry = { .moduleVersion = 1, .Bind = LinuxI2cBind, .Init = LinuxI2cInit, .Release = LinuxI2cRelease, .moduleName = "linux_i2c_adapter", // 【必要且与device_info.hcs文件里面匹配】};HDF_INIT(g_i2cLinuxDriverEntry); // 调用HDF_INIT将驱动入口注册到HDF框架中
/* 核心层i2c_core.c管理器服务的驱动入口 */struct HdfDriverEntry g_i2cManagerEntry = { .moduleVersion = 1, .Bind = I2cManagerBind, .Init = I2cManagerInit, .Release = I2cManagerRelease, .moduleName = "HDF_PLATFORM_I2C_MANAGER", // 这与device_info.hcs文件中device0对应};HDF_INIT(g_i2cManagerEntry);
2.2.2.2、配置属性文件
deviceNode信息与驱动入口注册相关,器件属性值对于驱动适配者的驱动实现以及核心层I2cCntlr相关成员的默认值或限制范围有密切关系。
统一服务模式的特点是device_info.hcs文件中第一个设备节点必须为I2C管理器,其各项参数如下所示:

从第二个节点开始配置具体I2C控制器信息,此节点并不表示某一路I2C控制器,而是代表一个资源性质设备,用于描述一类I2C控制器的信息。多个控制器之间相互区分的参数是busId和reg_pbase,这在i2c_config.hcs文件中有所体现。
本次案例以rk3568为案例(即文件//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs),添加deviceNode描述,具体修改如下:
device_i2c :: device { device0 :: deviceNode { policy = 2; priority = 50; permission = 0644; moduleName = "HDF_PLATFORM_I2C_MANAGER"; serviceName = "HDF_PLATFORM_I2C_MANAGER"; deviceMatchAttr = "hdf_platform_i2c_manager"; } device1 :: deviceNode { policy = 0; // 等于0,不需要发布服务 priority = 55; // 驱动启动优先级 permission = 0644; // 驱动创建设备节点权限 moduleName = "linux_i2c_adapter"; // 用于指定驱动名称,需要与期望的驱动Entry中的moduleName一致,必须是linux_i2c_adapter deviceMatchAttr = "linux_i2c_adapter"; // 用于配置控制器私有数据,要与i2c_config.hcs中对应控制器保持一致 }}
i2c_config.hcs 配置参考//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/i2c_config.hcs,具体修改如下:
root { platform { i2c_config { match_attr = "linux_i2c_adapter"; // 需要和device_info.hcs中的deviceMatchAttr值一致
template i2c_controller { bus = 0; // i2c控制器序号 }
controller_0x120b0000 :: i2c_controller { bus = 0; } controller_0x120b1000 :: i2c_controller { bus = 1; } controller_0x120b2000 :: i2c_controller { bus = 2; } controller_0x120b3000 :: i2c_controller { bus = 3; } controller_0x120b4000 :: i2c_controller { bus = 4; } controller_0x120b5000 :: i2c_controller { bus = 5; } controller_0x120b6000 :: i2c_controller { bus = 6; } controller_0x120b7000 :: i2c_controller { bus = 7; } } }}
2.2.2.3、实例化I2C控制器对象
完成驱动入口注册之后,下一步就是以核心层I2cCntlr对象的初始化为核心,包括驱动适配者自定义结构体(传递参数和数据),实例化I2cCntlr成员I2cMethod(让用户可以通过接口来调用驱动底层函数),实现HdfDriverEntry成员函数(Bind,Init,Release)。
static int32_t LinuxI2cTransfer(struct I2cCntlr *cntlr, struct I2cMsg *msgs, int16_t count);// 定义I2cMethod结构体变量g_method,实现i2c相应接口static struct I2cMethod g_method = { .transfer = LinuxI2cTransfer,};
static int32_t LinuxI2cBind(struct HdfDeviceObject *device);static int32_t LinuxI2cInit(struct HdfDeviceObject *device);static void LinuxI2cRelease(struct HdfDeviceObject *device);struct HdfDriverEntry g_i2cLinuxDriverEntry = { .moduleVersion = 1, .Bind = LinuxI2cBind, .Init = LinuxI2cInit, .Release = LinuxI2cRelease, .moduleName = "linux_i2c_adapter",};HDF_INIT(g_i2cLinuxDriverEntry);
2.2.2.4、驱动调试
建议先在Linux下修改确认,再移植到OpenHarmony。
2.3、I2C应用开发
2.3.1、接口说明
I2C模块提供的主要接口如表1所示,具体API详见//drivers/hdf_core/framework/include/platform/i2c_if.h。
I2C驱动API接口功能介绍如下所示:

(1)I2cOpen
在进行I2C通信前,首先要调用I2cOpen打开I2C控制器。
DevHandle I2cOpen(int16_t number);
I2cOpen参数定义如下:

I2cOpen返回值定义如下:

假设系统中存在8个I2C控制器,编号从0到7,以下代码示例为获取3号控制器:
DevHandle i2cHandle = NULL; /* I2C控制器句柄 /
/* 打开I2C控制器 */i2cHandle = I2cOpen(3);if (i2cHandle == NULL) { HDF_LOGE("I2cOpen: failed\n"); return;}
(2)I2cClose
I2C通信完成之后,需要关闭I2C控制器。
void I2cClose(DevHandle handle);
I2cClose参数定义如下:

(3)I2cTransfer
i2c消息传输。
int32_t I2cTransfer(DevHandle handle, struct I2cMsg \*msgs, int16_t count);
I2cTransfer参数定义如下:

I2cTransfer返回值定义如下:

I2C传输消息类型为I2cMsg,每个传输消息结构体表示一次读或写,通过一个消息数组,可以执行若干次的读写组合操作。组合读写示例:
int32_t ret;uint8_t wbuff[2] = { 0x12, 0x13 };uint8_t rbuff[2] = { 0 };struct I2cMsg msgs[2]; /* 自定义传输的消息结构体数组 */msgs[0].buf = wbuff; /* 写入的数据 */msgs[0].len = 2; /* 写入数据长度为2 */msgs[0].addr = 0x5A; /* 写入设备地址为0x5A */msgs[0].flags = 0; /* 传输标记为0,默认为写 */msgs[1].buf = rbuff; /* 要读取的数据 */msgs[1].len = 2; /* 读取数据长度为2 */msgs[1].addr = 0x5A; /* 读取设备地址为0x5A */msgs[1].flags = I2C_FLAG_READ /* I2C_FLAG_READ置位 *//* 进行一次自定义传输,传输的消息个数为2 */ret = I2cTransfer(i2cHandle, msgs, 2);if (ret != 2) { HDF_LOGE("I2cTransfer: failed, ret %d\n", ret); return;}
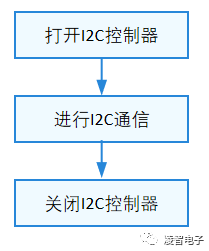
2.2.2、开发流程
使用I2C设备的一般流程如下图所示:
3、程序解析
3.1、准备工作
查看《凌蒙派-RK3568开发板排针说明表》(即Git仓库的//docs/board/凌蒙派-RK3568开发板排针说明表v1.0.xlsx),具体如下:

3.2、Linux内核解析
3.2.1、创建Linux内核Git
请参考《OpenHarmony如何为内核打patch》(即Git仓库的//docs/OpenHarmony如何为内核打patch.docx)。
3.2.2、修改设备树I2C2配置
修改//arch/arm64/boot/dts/rockchip/rk3568-lockzhiner.dtsi(即该目录是指已打Patch后的Linux内核,不是OpenHarmony主目录),定义i2c2启用,具体如下所示:
&i2c2 { status = "okay";};
3.2.3、创建内核patch
请参考《OpenHarmony如何为内核打patch》(即Git仓库的//docs/OpenHarmony如何为内核打patch.docx)。
3.2.4、替换OpenHarmony的内核patch
将制作出的kernel.patch替换到//kernel/linux/patches/linux-5.10/rk3568_patch/kernel.patch即可。
3.3、OpenHarmony配置树配置
3.3.1、device_info.hcs
//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs已定义好,具体如下:
device_i2c :: device { device0 :: deviceNode { policy = 2; priority = 50; permission = 0644; moduleName = "HDF_PLATFORM_I2C_MANAGER"; serviceName = "HDF_PLATFORM_I2C_MANAGER"; deviceMatchAttr = "hdf_platform_i2c_manager"; } device1 :: deviceNode { policy = 0; // 等于0,不需要发布服务 priority = 55; permission = 0644; moduleName = "linux_i2c_adapter"; deviceMatchAttr = "linux_i2c_adapter"; }}
注意:
device1是rk3568原有的配置,也是我们需要的,作为OpenHarmony的i2c配置。
moduleName定义为linux_i2c_adapter,表示该节点对应于//drivers/hdf_core/adapter/khdf/linux/platform/i2c/i2c_adapter.c,该驱动是对接Linux i2c子系统。
3.3.2、i2c_config.hcs
在//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/i2c_config.hcs,具体内容如下:
root { platform { i2c_config { match_attr = "linux_i2c_adapter";
template i2c_controller { bus = 0; }
controller_0x120b0000 :: i2c_controller { bus = 0; } controller_0x120b1000 :: i2c_controller { bus = 1; } controller_0x120b2000 :: i2c_controller { bus = 2; } controller_0x120b3000 :: i2c_controller { bus = 3; } controller_0x120b4000 :: i2c_controller { bus = 4; } controller_0x120b5000 :: i2c_controller { bus = 5; } controller_0x120b6000 :: i2c_controller { bus = 6; } controller_0x120b7000 :: i2c_controller { bus = 7; } } }}
注意:
controller_0x120b2000是为i2c2准备的。
bus用于定于Linux i2c控制器序号。
3.4、OpenHarmony I2C平台驱动
在//drivers/hdf_core/adapter/khdf/linux/platform/i2c/i2c_adapter.c已编写对接Linux I2C驱动的相关代码,具体内容如下:
struct HdfDriverEntry g_i2cLinuxDriverEntry = { .moduleVersion = 1, .Bind = LinuxI2cBind, .Init = LinuxI2cInit, .Release = LinuxI2cRelease, .moduleName = "linux_i2c_adapter",};HDF_INIT(g_i2cLinuxDriverEntry);
该部分代码不细述,感兴趣的读者可以去详读。
3.5、应用程序
3.5.1、i2c_test.c
i2c相关头文件如下所示:
#include "i2c_if.h" // i2c标准接口头文件
主函数负责i2c读写操作。
其中,读操作源代码具体如下:
int main(int argc, char* argv[]){ DevHandle handle = NULL; int32_t ret = 0; struct I2cMsg msgs[2]; // 消息结构体数组 int16_t msgs_count = 0; uint8_t wbuff[STRING_MAXSIZE] = { 0 }; uint8_t rbuff[STRING_MAXSIZE] = { 0 };
// 解析参数......
// 打开i2c控制器 handle = I2cOpen(m_i2c_number); if (handle == NULL) { PRINT_ERROR("I2cOpen failed\n"); return -1; }
if (m_i2c_flags_read == 1) { // 读操作 // 设置msgs数组有效数目 msgs_count = 2; // 初始化msgs[0],该部分为主设备发送从设备的i2c内容 msgs[0].addr = m_i2c_slave_address; msgs[0].flags = toI2cFlags(0, m_i2c_flags_addr_10bit, m_i2c_flags_read_no_ack, m_i2c_flags_ignore_no_ack, m_i2c_flags_no_start, m_i2c_flags_stop); msgs[0].len = 1; wbuff[0] = m_i2c_reg_address; // 本案例的i2c从设备是第1字节是寄存器地址 msgs[0].buf = wbuff; // 初始化msgs[1],该部分为主设备读取从设备发送的i2c内容 msgs[1].addr = m_i2c_slave_address; msgs[1].flags = toI2cFlags(1, m_i2c_flags_addr_10bit, m_i2c_flags_read_no_ack, m_i2c_flags_ignore_no_ack, m_i2c_flags_no_start, m_i2c_flags_stop); msgs[1].len = m_i2c_read_data_length; msgs[1].buf = rbuff; // i2c数据传输,传输次数为2次 ret = I2cTransfer(handle, msgs, msgs_count); if (ret != msgs_count) { PRINT_ERROR("I2cTransfer(read) failed and ret = %d\n", ret); goto out; }
printf("I2cTransfer success and read data length = %d\n", strlen((char *)rbuff)); for (uint32_t i = 0; i < strlen((char *)rbuff); i++) { printf("rbuff[%d] = 0x%x\n", i, rbuff[i]); } } else {...... }
out: // 关闭i2c控制器 I2cClose(handle); return ret;}
写操作源代码如下所示:
int main(int argc, char* argv[]){ DevHandle handle = NULL; int32_t ret = 0; struct I2cMsg msgs[2]; // 消息结构体数组 int16_t msgs_count = 0; uint8_t wbuff[STRING_MAXSIZE] = { 0 }; uint8_t rbuff[STRING_MAXSIZE] = { 0 };
// 解析参数 ......
// 打开i2c控制器 handle = I2cOpen(m_i2c_number); if (handle == NULL) { PRINT_ERROR("I2cOpen failed\n"); return -1; }
if (m_i2c_flags_read == 1) { ...... } else { // 写操作 // 设置msgs数组有效数目 msgs_count = 1; // 初始化msgs[0],该部分为主设备发送从设备的i2c内容 msgs[0].addr = m_i2c_slave_address; msgs[0].flags = toI2cFlags(0, m_i2c_flags_addr_10bit, m_i2c_flags_read_no_ack, m_i2c_flags_ignore_no_ack, m_i2c_flags_no_start, m_i2c_flags_stop); msgs[0].len = 2; wbuff[0] = m_i2c_reg_address; // 本案例的i2c从设备是第1字节是寄存器地址 wbuff[1] = m_i2c_reg_value; // 本案例的i2c从设备是第2字节是寄存器数值 msgs[0].buf = wbuff; // i2c数据传输,传输次数为2次 ret = I2cTransfer(handle, msgs, msgs_count); if (ret != msgs_count) { PRINT_ERROR("I2cTransfer(write) failed and ret = %d\n", ret); goto out; }
printf("I2cTransfer success and write reg(%d), data(%d)\n", m_i2c_reg_address, m_i2c_reg_value); }
out: // 关闭i2c控制器 I2cClose(handle); return ret;}
3.5.2、BUILD.gn
编写应用程序的BUILD.gn,具体内容如下:
import("//build/ohos.gni")import("//drivers/hdf_core/adapter/uhdf2/uhdf.gni")
print("samples: compile rk3568_i2c_test")ohos_executable("rk3568_i2c_test") { sources = [ "i2c_test.c" ] include_dirs = [ "$hdf_framework_path/include", "$hdf_framework_path/include/core", "$hdf_framework_path/include/osal", "$hdf_framework_path/include/platform", "$hdf_framework_path/include/utils", "$hdf_uhdf_path/osal/include", "$hdf_uhdf_path/ipc/include", "//base/hiviewdfx/hilog/interfaces/native/kits/include", "//third_party/bounds_checking_function/include", ]
deps = [ "$hdf_uhdf_path/platform:libhdf_platform", "$hdf_uhdf_path/utils:libhdf_utils", "//base/hiviewdfx/hilog/interfaces/native/innerkits:libhilog", ]
cflags = [ "-Wall", "-Wextra", "-Werror", "-Wno-format", "-Wno-format-extra-args", ]
part_name = "product_rk3568" install_enable = true}
3.5.3、参与应用程序编译
编辑//vendor/lockzhiner/rk3568/samples/BUILD.gn,开启编译选项。具体如下:
"b06_platform_device_i2c/app:rk3568_i2c_test",
4、程序编译
建议使用docker编译方法,运行如下:
hb set -root .hb set# 选择lockzhiner下的rk3568编译分支。hb build -f
5、运行结果
运行如下:
# rk3568_i2c_test -n 2 -a 115 -r 0 -l 1i2c number: 2i2c slave address: 115i2c reg address: 0i2c reg value: 0i2c read data length: 1i2c flags read: 1i2c flags addr 10bit: 0i2c flags read no ack: 0i2c flags ignore no ack: 0i2c flags no start: 0i2c flags stop: 0I2cTransfer success and read data length = 1rbuff[0] = 0x20#
上述命令为:查看i2c2控制器,从设备地址115(即0x73,该地址为个人外接i2c芯片),读取寄存器地址0,数据长度为1。
在调试过程中,OpenHarmony还提供Linux i2c-tools工具。
(1)查看i2c控制器
# i2cdetect -li2c-1 i2c rk3x-i2c I2C Adapteri2c-6 i2c DesignWare HDMI I2C Adapteri2c-2 i2c rk3x-i2c I2C Adapteri2c-0 i2c rk3x-i2c I2C Adapteri2c-5 i2c rk3x-i2c I2C Adapter#
(2)查看i2c2控制器所有从设备地址
# i2cdetect -y 2 0 1 2 3 4 5 6 7 8 9 a b c d e f00: -- -- -- -- -- -- -- -- -- -- -- -- --10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --50: -- 51 -- -- -- -- -- -- -- -- -- -- -- -- -- --60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --70: -- -- -- 73 -- -- -- --#
(3)读取i2c2控制器的从设备地址0x73的所有寄存器数据
# i2cdump -y 2 0x73 0 1 2 3 4 5 6 7 8 9 a b c d e f 0123456789abcdef00: 20 76 01 00 00 00 00 00 00 00 00 00 00 00 00 00 v?.............10: 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 ................20: 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 ................30: 00 00 29 01 00 01 00 09 15 0a 12 80 04 00 05 00 ..)?.?.??????.?.40: 02 ff ff 00 00 00 60 20 20 03 c8 00 14 00 1a 14 ???...` ??.?.??50: 00 05 00 00 14 20 03 02 20 00 00 02 02 00 00 3f .?..? ?? ..??..?60: 23 23 00 03 f7 03 d9 03 01 c8 40 00 00 04 00 00 ##.???????@..?..70: 80 00 00 00 f0 00 3f ff ff 7f 7f f2 34 92 00 00 ?...?.??????4?..80: 66 66 0c 20 20 00 10 00 05 18 10 10 37 00 f0 81 ff? .?.????7.??90: 0c 06 1e 0d 0a 0c 0a 04 0a 41 0a 0a 2b 33 ae f9 ?????????A??+3??a0: 48 13 10 08 30 11 10 08 24 04 1e 1e 00 00 00 00 H???0???$???....b0: 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 ................c0: 00 00 00 00 00 00 00 00 00 00 00 00 1a 0d 03 63 ............???cd0: 22 0f 88 00 00 00 00 00 00 00 00 00 00 00 00 00 "??.............e0: 01 04 41 d6 00 0c 0a 00 00 00 00 00 00 00 07 00 ??A?.??.......?.f0: 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 ................#
-
I2C
+关注
关注
28文章
1483浏览量
123545 -
开发板
+关注
关注
25文章
5017浏览量
97334 -
驱动控制
+关注
关注
0文章
121浏览量
15750 -
OpenHarmony
+关注
关注
25文章
3695浏览量
16223
发布评论请先 登录
相关推荐
RISC V的I2C操作
I2C协议的基础知识

如何在android i2c控制tas5548 ?
SPI和I2C通信协议:应用与区别
什么是I2C协议 I2C总线的控制逻辑

GD32 MCU硬件I2C不可靠不如软件I2C?来看看红枫派开发版的硬件I2C驱动如何做到稳得一批






 工商网监
工商网监
评论