 高光谱成像威廉希尔官方网站
在垃圾分选中的应用
高光谱成像威廉希尔官方网站
在垃圾分选中的应用
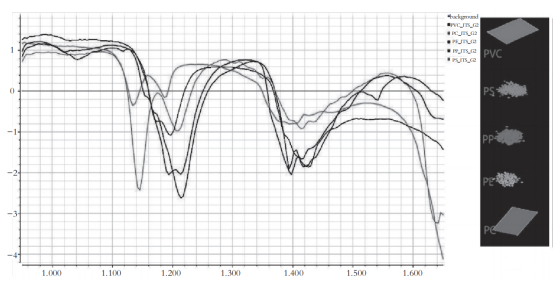
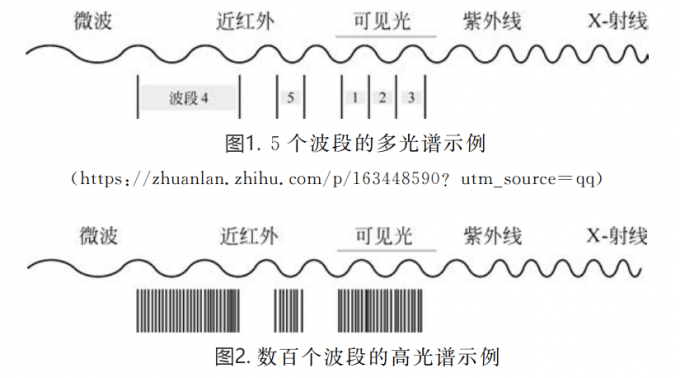
对于垃圾分类的需求来说,如果仅需进行大类的分选,2D相机加上视觉算法可以实现较好的分类效果。但是如果需要进一步进行精确的材质细分,例如区分塑料中的PE、PVC、PP、ABS等细分材质,则必须要用到高光谱相机。高光谱成像的实现基础是成像光谱学,其集成了光学成像威廉希尔官方网站 和光谱分光威廉希尔官方网站 。高光谱数据结合图像和光谱功能,可进行成分分析,提高分类精度,并通过坐标系关联实现机器人实时抓取。
分析基于高光谱分选的关键威廉希尔官方网站
高光谱分选设备的关键威廉希尔官方网站 主要包括分类算法和控制系统2个部分。分类算法分为基于光谱相似度匹配的分类算法和基于机器学习的分类算法。控制系统包括视觉系统、控制中心、输送系统、执行系统等。
高光谱相机原理
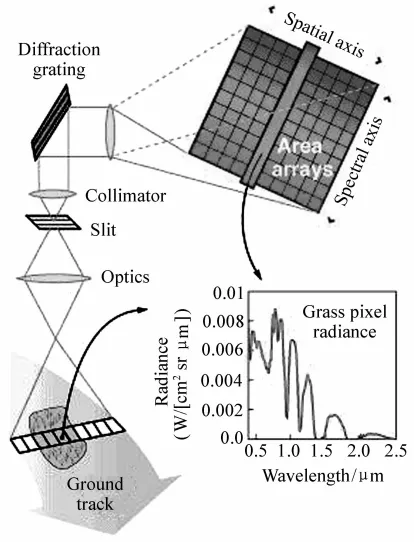
高光谱相机采集物体的反射光谱,典型的高光谱相机的原理是,光源投射到待测物体上,反射后经过相机镜头前端的狭缝进入高光谱相机内部的核心元件——分光仪。分光仪将每一束光分成多束单色光,投到面阵相机上。面阵相机狭缝的长度方向w为像素维度,与狭缝垂直方向h为光谱维度,面阵相机w和h2个方向的分辨率决定着高光谱数据的像素分辨率和光谱分辨率。

2、数据处理
高光谱相机数据是三维数据,需要处理面阵相机二维数据获取和数据拼接两部分。获取面阵相机数据与普通2D相机无差异,调整图像质量时,需调整包括光源亮度、光圈、焦距和曝光时间等,以获得最优的图像效果。
基于机器学习的分类方法
基于机器学习的分类方法分为非监督分类和监督分类。非监督分类是指在没有任何分类先验知识的情况下,仅依据数据本身的统计特征及自然点群的分布情况来划分类别的分类方法,代表性的非监督分类包括均值聚类算法(K-Means)、迭代自组织数据分析算法。监督分类是指以先前提取的训练样本作为先验知识,以对训练样本的学习构建分类模型,并对其他数据进行分类的过程。监督分类算法常用的包括高斯最大似然分类法、最小距离分类、K近邻、决策树以及支持向量机等。由于高光谱数据的波段数通常有200多个以上,包含丰富的信息,但有很多数据冗余,在进行监督分类之前,需要对数据进行特征提取,选取包含信息量大的波段或者特征来降低数据的冗余程度。将原始高维数据投影到一个新的低维空间,从而获得原始数据的更精简的表示,即降维,可以有效减少运算量,提高运算速度。常用的降维方法包括主成分分析(PCA)、线性判别分析(LDA)、回归系数法、连续投影法等。
推荐:
无人机机载高光谱成像系统iSpecHyper-VM100
一款基于小型多旋翼无人机机载高光谱成像系统,该系统由高光谱成像相机、稳定云台、机载控制与数据采集模块、机载供电模块等部分组成。无人机机载高光谱成像系统通过独特的内置式或外部扫描和稳定控制,有效地解决了在微型无人机搭载推扫式高光谱照相机时,由于振动引起的图像质量较差的问题,并具备较高的光谱分辨率和良好的成像性能。

审核编辑 黄宇
-
成像威廉希尔官方网站
+关注
关注
4文章
290浏览量
31456 -
高光谱
+关注
关注
0文章
330浏览量
9937
发布评论请先 登录
相关推荐

无人机机载高光谱成像系统的应用及优势
实验室高光谱成像仪的应用与优势

高光谱成像仪的数据怎么看

高光谱成像威廉希尔官方网站 在肤检测、植被遥感与环境检测中的应用
高光谱成像系统解析

高光谱成像威廉希尔官方网站 :从原理到应用的全面指南
高光谱成像系统:光谱成像威廉希尔官方网站 在海域目标探测中的应用
如何开展高光谱成像威廉希尔官方网站 在农业遗传育种中的应用研究?

如何使用高光谱成像威廉希尔官方网站 进行作物健康监测?

高光谱成像与遥感威廉希尔官方网站 :哪个更适合环境监测?

便携式高光谱成像系统在远程感知中的应用探究
光谱成像威廉希尔官方网站 分类及应用





 工商网监
工商网监
评论