 未来机器人发布三款3D slam平衡重无人叉车!
未来机器人发布三款3D slam平衡重无人叉车!
从室内到室外,专为攻克高难度、复杂作业场景而生。
未来机器人正式发布三款E系列平衡重无人叉车:VNE30,VNE35,VNE40。 这三款E系列平衡重无人叉车均采用多雷达3D SLAM 定位方式,视觉+3D激光混合感知,以及3D立体安全防护,无论是威廉希尔官方网站 实力、性能优势、场景适配能力等,堪称无人叉车中“多边形”战士,从室内到室外,专为攻克高难度、复杂作业场景而生。

多雷达3D SLAM 复合定位
支持复杂场景更快建图
三款E系列平衡重无人叉车采用多颗3D 雷达复合定位方式,定位功能更强大,不仅支持无人叉车在室内、半室外场景中定位,同时支持密集堆叠、高位货架、室外(园区内)、斜坡等高难度场景下的车辆高精度定位,单车重复定位精度可达±10mm /±0.5°。当同一区域中有多车存在,多车定位精度一致性为±15mm/±1°。
3D建图更快,当无人叉车在1~1.5m/s速度区间中稳定运行,预计25分钟可完成10000㎡区域面积地图搭建,并且支持离线地图优化;非动态场景支持最大面积为15000㎡区域建图,高动态场景支持最大面积10000㎡区域建图。
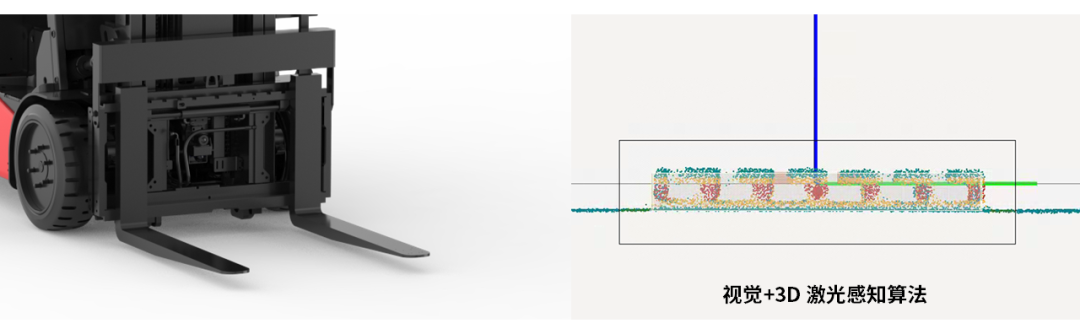
丰富而强大的感知能力
精准获取物流世界信息
最新三款E系列平衡重无人叉车拥有丰富而强大的感知识别能力,能识别载具类型、材质和颜色,同时基于视觉+3D激光,进一步提升了无人叉车的取放货能力、伺服感知能力等,使得车辆对物流世界信息的认知与获取更加精准。
载具识别 E系列平衡重无人叉车不仅能识别各种载具类型,还能识别木材、塑料、漫反射金属等载具材质,以及载具颜色:白色、黑色、金属色(银色)、黄色、绿色、红色、蓝色、棕色等。
E系列平衡重无人叉车的载具识别能力不仅限于此,其感知能力强大到可对载具上的墩孔尺寸进行检测,根据不同的检测距离对应不同的载具墩高、墩宽、墩孔尺寸检测,支持墩的多种形状检测和多墩孔载具检测。如人眼般更清晰精准地获取物流世界的信息。
取货感知 E系列平衡重无人叉车通过感知识别载具位姿,在通道宽度允许的前提下,可以对摆放存在位姿偏差(极限值:前后±300mm,左右±300mm,偏差角度±10°。)的托盘货物进行精准叉取,同时可通过感知探测货叉上是否有载具或者货物,保证无人叉车运行时的货物安全。

放货感知 E系列平衡重无人叉车放货感知分为空间检测和高度自适应。空间检测即是无人叉车在放货过程中,对放货的库位空间大小进行判断是否能够安全放货,如果检测空间过小,或者存在障碍物,不满足放货条件,无人叉车就会暂停放货作业并提示工作人员尽快处理。高度自适应:该功能适用于多层堆叠场景,尤其是软包货物堆叠。货物高度变化量在±300mm以内,可通过检测下面的货物位姿高度,调整叉车自身位姿寻找适宜的放货高度。
伺服感知 E系列平衡重无人叉车在感知与伺服控制协同方面也做了革新,可以做到不停车感知取货,进一步提升作业效率。
3D立体安全防护
三重防护区域开启
E系列平衡重无人叉车在安全防护方面采用3D激光安全防护,作业过程中(含满载或者空载)持续开启三重安全防护区域:监测区,减速区和制动区。
监测区:当障碍物处在无人叉车监测区内,无人叉车实时监测与障碍物之间的距离变化;
减速区:当障碍物处于无人叉车减速区时,无人叉车会自动减速;
制动区:当障碍物与无人叉车距离进一步缩短至制动区内,无人叉车就会自动停下,直到障碍物离开制动区。
此外,在车辆转弯时,基于无人叉车舵角自动生成车辆安全防护区域。
在垂直空间方向,E系列平衡重无人叉车通过整车多雷达扫描,点云融合防护与地面的高度关系,开启高、中、低及低落防护,实现全方位立体安全防护。大容量磷酸锂电池
高性能续航能力
E系列平衡重无人叉车配置大容量磷酸锂电池,电池容量500Ah,充电机最大支持选配300A快充。当电池电量为30%时,能在1.2h内充满,充电快速,续航能力强,可持续高效作业。
场景适配强者
攻克高难度作业流程
强大威廉希尔官方网站 实力和性能优势,使得E系列平衡重无人叉车能够适应多种环境,不受室外强光影响,并且在低温环境中也能正常作业;四支点实心橡胶轮胎,双驱双舵,即便在复杂地面上也能平稳运行;
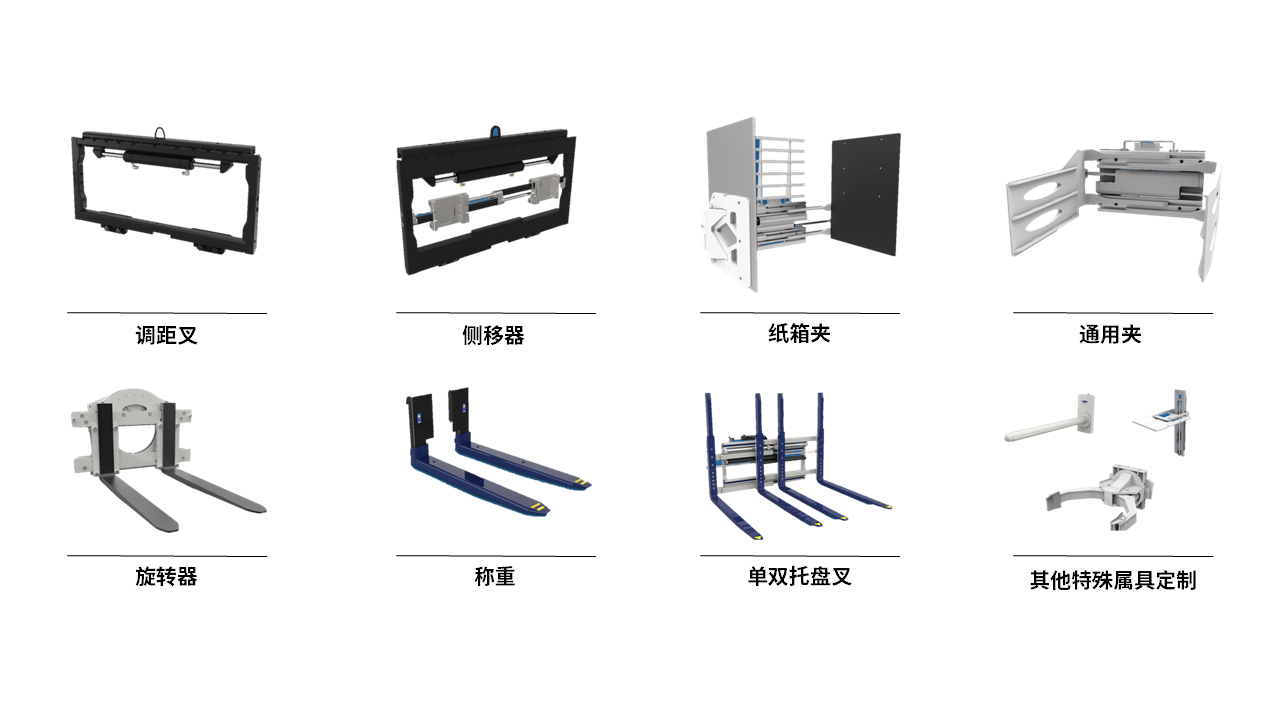
此外,E系列平衡重无人叉车还支持调距叉、侧移器、旋转器、单双托盘叉等多种属具拓展,适配不同货物载具,满足更多行业客户的作业需求。
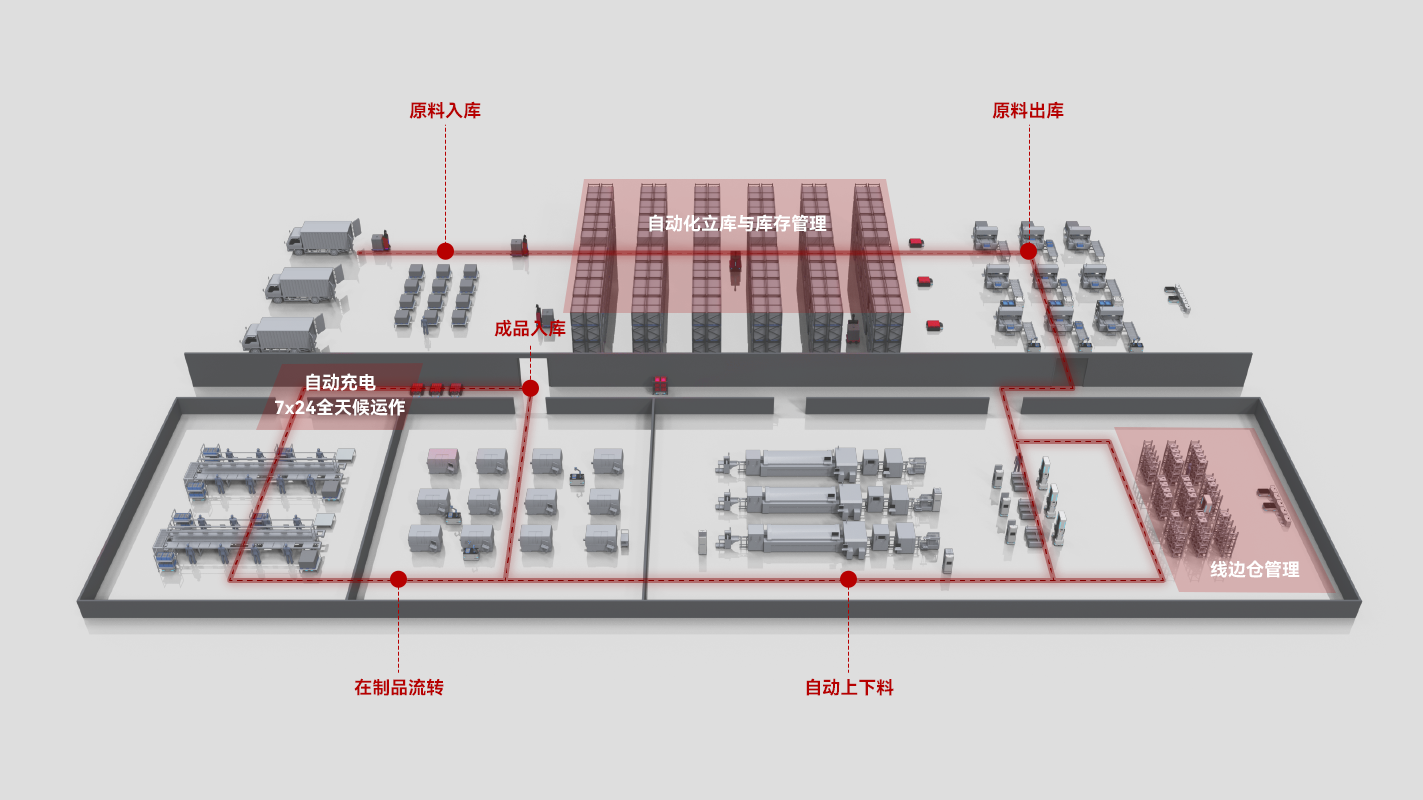
目前E系列平衡重无人叉车开始投入到工厂物流作业中,覆盖从室内到室外平面转运,多层堆叠,无人装卸等场景。
平面转运:室内线边转运、线库存储,室外转运等;
多层堆叠:包括不限于板货堆叠、软包堆叠及其他类型货物堆叠等;
无人装卸:覆盖飞翼车、平板车、高低栏货车、尾掏车等不同类别货车无人装卸。

-
雷达
+关注
关注
50文章
2930浏览量
117473 -
SLAM
+关注
关注
23文章
423浏览量
31824 -
3D激光
+关注
关注
0文章
30浏览量
7468
原文标题:未来机器人发布三款3D slam平衡重无人叉车!
文章出处:【微信号:robotinside2014,微信公众号:移动机器人产业联盟】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
禾赛将推出机器人领域迷你3D激光雷达

agv搬运机器人是怎么实现无人搬运的?

镭神智能机器人三向叉式3D SLAM无人叉车:重塑高位堆垛与窄通道仓储新境界

轻量级搬运王者:镭神智能LXST20-D3D SLAM无人叉车,高效安全新选择
镭神智能机器人官网盛大启航:开启3D SLAM无人叉车领域新篇章
井松发布新平衡重机器人“X3-FMR”

开源项目!用ESP32做一个可爱的无用机器人
镭神智能牵头起草的业内首个激光雷达3D SLAM无人叉车团体标准正式发布
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
镭神智能展示全球领先的3D SLAM无人叉车物流装备与威廉希尔官方网站
重磅| 奥比中光全新双目系列3D相机,搭载自研芯片,为智能机器人而生

无人叉车与码垛机器人:自动化搬运的两大得力助手
镭神智能3D SLAM无人叉车系列在华为云商城正式上线






 工商网监
工商网监
评论