 基于CW32的PID温度控制案例分享
基于CW32的PID温度控制案例分享
1.PID温控系统是一种常用的控制系统,用于实现对温度变量的精确控制。PID算法根据当前的温度误差以及误差的变化率,计算一个控制信号,用于调节加热器的输出。以下是PID算法的三个主要组成部分:
①比例(Proportional)控制:比例控制是根据当前的温度误差来计算控制信号。具体而言,通过将设定温度与实际温度之间的差异称为误差,然后将误差乘以一个比例增益参数,得到一个修正值。这个修正值与控制设备的输出信号相加,以调整温度控制。
②积分(Integral)控制:积分控制用于处理长期的温度误差。它通过对温度误差进行积分来计算一个积分误差。积分误差乘以积分增益参数,并且在一段时间内进行积累,得到一个修正值。积分控制可以帮助消除持续的稳态误差,使系统更快地达到设定温度。
③微分(Derivative)控制:微分控制用于处理温度变化的速率。它通过计算温度误差的变化率,即误差的导数,得到一个微分值。微分值乘以一个微分增益参数,用于调整修正值。微分控制可以帮助系统更快地响应温度变化,以防止过冲。
通过结合比例、积分和微分部分的修正值,PID控制算法可以计算出最终的控制信号。这个控制信号会被传递给加热器,以控制温度的变化。
2.本实验用到了CW32-48大学计划开发板OK、温控实验模块及Keil5开发环境。
|
CW32-48大学计划开发板OK |
温控实验模块 |
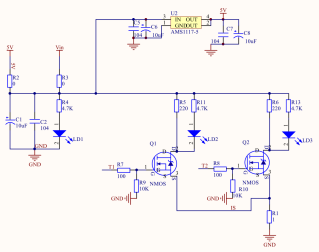 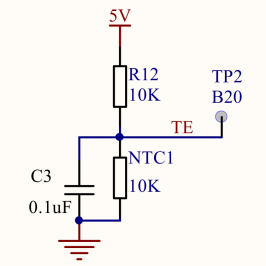 温控模块电路原理图 |
|
4.核心代码
mian.c:
#include "config.h"
unsigned char face = 0; //界面变量
unsigned char face_brush = 0; //界面刷新频率控制
void InitSystem(void)
{
RCC_Configuration(); //时钟配置
ADC_Configuration(); //ADC采集通道配置,采集NTC热敏电阻电压
PID_Configuration(); //PID参数配置
GPIO_KEYS_Configuration(); //按键GPIO配置
PWM_Init(); //两路PWM输出初始化
Lcd_Init(); //TFT屏幕初始化
BTIM_Init(); //定时器初始化
}
void Interface(void) //人机交互界面
{
if ( face_brush > 200 ) //200ms刷新一次
{
face_brush = 0;
switch(face)
{
case 0://显示PV和SV,该界面下,可以设定SV
TFTSHOW_STRING_HEADLINE(0,0," PID Control ");
TFTSHOW_STRING(2,0,"REAL_Temper(℃):");
TFTSHOW_STRING(4,0," P V: ");
TFTSHOW_FLOAT_NUMBER(4,8,pid.Pv);
TFTSHOW_STRING(6,0,"SET_Temper(℃):");
TFTSHOW_STRING(8,0," S V: ");
TFTSHOW_FLOAT_NUMBER(8,8,pid.set_Sv);
break;
case 1://该界面下,可以设定P参数
TFTSHOW_STRING_HEADLINE(0,0," PID Control ");
TFTSHOW_STRING(2,0,"SET PID Control:");
TFTSHOW_STRING(4,0," P : ");
TFTSHOW_INT_NUMBER(4,8,pid.set_Kp);
break;
case 2://该界面下,可以设定I参数
TFTSHOW_STRING_HEADLINE(0,0," PID Control ");
TFTSHOW_STRING(2,0,"SET PID Control:");
TFTSHOW_STRING(4,0," I : ");
TFTSHOW_FLOAT_NUMBER(4,8,pid.set_Ki);
break;
case 3://该界面下,可以设定D参数
TFTSHOW_STRING_HEADLINE(0,0," PID Control ");
TFTSHOW_STRING(2,0,"SET PID Control:");
TFTSHOW_STRING(4,0," D : ");
TFTSHOW_INT_NUMBER(4,8,pid.set_Kd);
break;
case 4://该界面下,可以设定Out0,即修正值
TFTSHOW_STRING_HEADLINE(0,0," PID Control ");
TFTSHOW_STRING(2,0,"SET PID Control:");
TFTSHOW_STRING(4,0," OUT0 : ");
TFTSHOW_INT_NUMBER(4,10,pid.set_Out0);
break;
}
}
}
int main() //主函数
{
InitSystem(); //系统初始化
while(1)
{
PID_Calc(); //PID运算
Interface(); //人机交互界面
Keys_Function(); //按键控制
}
}
pwm.c:
#include "pwm.h"
void PWM_Init(void)
{
RCC_APBPeriphClk_Enable1(RCC_APB1_PERIPH_GTIM2,ENABLE); //使能GTIM2时钟
__RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟
PA01_AFx_GTIM2CH2(); //打开PWM输出通道
PA02_AFx_GTIM2CH3();
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.IT = GPIO_IT_NONE;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出模式
GPIO_InitStruct.Pins = GPIO_PIN_1|GPIO_PIN_2;
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH;
GPIO_Init(CW_GPIOA, &GPIO_InitStruct);
GTIM_InitTypeDef GTIM_Initstructure; //通用定时器
GTIM_Initstructure.Mode=GTIM_MODE_TIME; //计数模式
GTIM_Initstructure.OneShotMode=GTIM_COUNT_CONTINUE; //连续计数
GTIM_Initstructure.Prescaler=GTIM_PRESCALER_DIV64; //预分频
GTIM_Initstructure.ReloadValue=2000-1; //ARR,计数重载周期2000
GTIM_Initstructure.ToggleOutState=DISABLE;
GTIM_TimeBaseInit(CW_GTIM2,>IM_Initstructure);
GTIM_OCInit(CW_GTIM2,GTIM_CHANNEL3,GTIM_OC_OUTPUT_PWM_LOW); //GTIM2输出比较,CH3、CH2
GTIM_OCInit(CW_GTIM2,GTIM_CHANNEL2,GTIM_OC_OUTPUT_PWM_LOW); //有效占空比为低电平
GTIM_Cmd(CW_GTIM2,ENABLE); //使能GTIM2
}
void PWM1_Output(uint32_t value)
{
GTIM_SetCompare3(CW_GTIM2,value); //设置GTIM2通道3的CCR
}
void PWM2_Output(uint32_t value)
{
GTIM_SetCompare2(CW_GTIM2,value); //设置GTIM2通道2的CCR
}
void PWM_ALL_Output(uint32_t value) //PWM1、2同步输出
{
PWM1_Output(value);
PWM2_Output(value);
}
pid.c:
#include "pid.h"
PID pid; //定义PID结构体变量pid
void PID_Configuration(void) //PID参数初始化配置
{
pid.Sv = 55;
pid.Kp = 350; //比例系数
pid.Ki = 10; //积分系数
pid.Kd = 38; //微分系数
pid.Ek_1 = 0; //上一次偏差
pid.T = 400; //PID计算周期
pid.cnt = 0;
pid.cycle = 2000; //PWM周期
pid.Out0 = 500; //PID修正值
pid.set_Sv = pid.Sv;
pid.set_Kp = pid.Kp;
pid.set_Ki = pid.Ki;
pid.set_Kd = pid.Kd;
pid.set_Out0 = pid.Out0;
}
float Get_Pv(void) //Pv意为当前测量值,即当前温度
{
return Get_Temperture();
}
void PID_Calc(void) //PID算法
{
float Pout,Iout,Dout;
float out;
if ( pid.cnt > pid.T ) //控制计算周期
{
pid.cnt = 0;
pid.Pv = Get_Pv();
pid.Ek = pid.Sv - pid.Pv; //计算偏差
pid.SumEk += pid.Ek; //偏差累积
Pout = pid.Kp * pid.Ek; //比例控制
Dout = pid.Kd * (pid.Ek - pid.Ek_1); //微分控制
if(pid.Pv>(pid.Sv-1)) //当测量值非常接近目标值的时候加入积分控制
{
Iout = pid.Ki * pid.SumEk; //积分控制
out = Pout + Iout + Dout + pid.Out0;
}
else out = Pout + Dout + pid.Out0; //测量值距离目标值较远时只使用PD控制
if ( out > pid.cycle ) pid.Out = pid.cycle; //限幅
else if ( out < 0 ) pid.Out = 0;
else pid.Out = out;
PWM_ALL_Output(pid.Out); //控制PWM输出
pid.Ek_1 = pid.Ek; //进行下一次PID运算之前,将本次偏差变为上次偏差
}
}
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
处理器
+关注
关注
68文章
19265浏览量
229670 -
热敏电阻
+关注
关注
14文章
1163浏览量
101505 -
加热器
+关注
关注
3文章
222浏览量
21142 -
TFT屏
+关注
关注
0文章
17浏览量
5751 -
PID温度控制
+关注
关注
0文章
3浏览量
936
原文标题:【CW32】基于CW32的PID温度控制
文章出处:【微信号:CW32生态社区,微信公众号:CW32生态社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于CW32的门禁综合系统
基于CW32单片机的门禁综合系统是一款功能强大的智能门禁解决方案,它提供了三种开锁方式:密码开锁、指纹开锁和刷卡开锁,为用户提供方便、安全的门禁控制。该系统的核心控制器采用了CW32单


cw32和stm32的区别
cw32和stm32的区别 CW32和STM32是两种常见的单片机,被广泛应用于各种电子设备中。在本文中,我们将深入探讨CW32和STM32之间的区别和优劣势。 1. 硬件性能 硬件性能是衡量单片机
cw32和gd32的区别
推出的一款32位微控制器,它是WCH唯一以ARM Cortex-M3内核为基础的产品系列,Cortex-M3内核是ARM公司的经典内核之一,性能稳定,功耗低。CW32系列的主频高达72MHz,内置了

应用笔记-CW32 自举程序中使用的 ISP 协议
CW32自举程序中使用的ISP协议CW32微控制器片上FLASH存储器有一部分区域用于存储BootLoader启动程序,在芯片出厂时已编程,用户可利用BootLoader启动程序提供的ISP模式
发表于 06-06 13:37
•7次下载

CW32单片机在智能马桶的应用介绍
和调节。本文将介绍CW32单片机在智能马桶的详细应用。图:CW32的智能马桶控制板CW32单片机在智能马桶的应用介绍1.温度感应与






 工商网监
工商网监
评论