 KUKA机器人控制系统的网络连接
KUKA机器人控制系统的网络连接
如果项目里已发生变化,则必须借助于 WorkVisual 将变化情况发送给控制系统。
库卡将该过程称为 “安装”。
在将一个项目传输到机器人控制系统时,总是先生成代码。
与实际机器人控制系统之间的网络连接是“安装”的首要条件。
生成代码
以此步骤可单独生成代码,这样可事先检查生成过程是否无错。
调用可通过:
按序打开菜单:工具 > 生成代码
或者按动按钮
代码在窗口项目结构的选项卡文件中显示。
自动生成的代码显示为浅灰色。
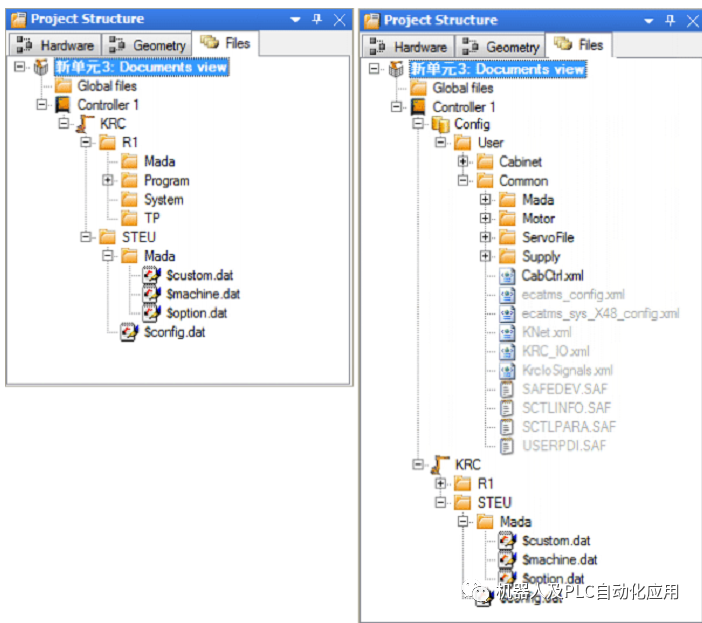
代码即生成。当过程结束时,信息窗口中显示以下信息提示:编译了项目 <“{0}” V{1}>。结果见文件树。
1. 在菜单栏中点击 安装 ... 键。窗口 项目传输自动打开。
键。窗口 项目传输自动打开。
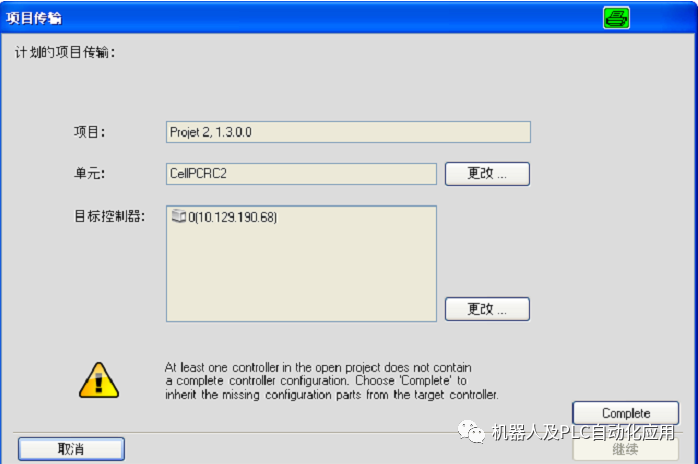
2. 如果所涉及的项目还从来 未从机器人控制系统回传至 WorkVisual,则它还不包含所有配置文件 (配置文件包括机器数据文件、安全配置文件和其它很多文件)。这通过一个提示显示出来。
如果未显示该提示:继续第 13 步。
如果显示该提示:继续第 3 步。
3. 点击 完整化。显示以下安全询问:项目必须保存,并重置激活的控制系统!您想继续吗 ?
4. 点击 是应答。窗口合并项目随即打开。
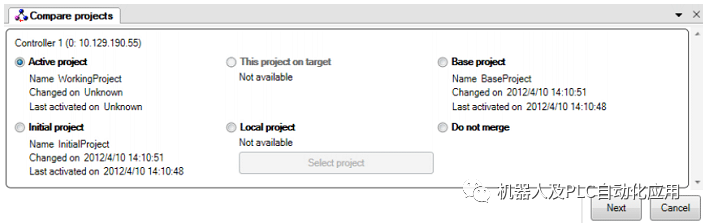
5. 选择一个要应用其配置数据的项目,例如一个在实际应用的机器人控制系统上激活的项目。
6. 点击 继续。显示一个进度条。如果项目包含多个机器人控制系统,则显示每个系统的进度条。
7. 当进度条已填满且出现状态显示以及 “ 合并准备就绪 ”时:点击显示区别键。
项目之间的差异即以一览表的形式显示出来。
8. 对每种差异均应选择需采用的状态。不必一次完成对所有差异的这种选择。如果合适的话,也可保留默认选择。
9. 点击 合并,应用更改。
10. 重复步骤 8 和 9 任意多次。这样,可逐步编辑各个区域。
若不再有其他差异,则显示以下信息:无其它区别。
11. 关闭窗口 比较项目。
12. 在菜单栏中点击按键 安装 ... 。重新显示单元对应概览。有关不完整配置的提示不再显示。
。重新显示单元对应概览。有关不完整配置的提示不再显示。
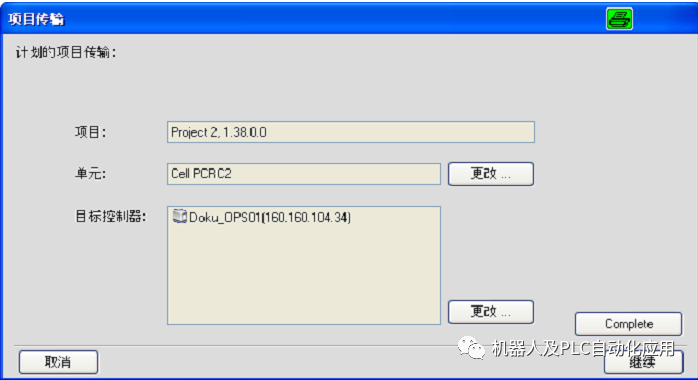
13. 点击 继续。启动程序生成。当进度条显示 100 % 时,程序即已生成并且项目已被传输。
14. 点击 激活。
15. 仅限于运行方式 T1 及 T2:KUKA smartHMI 显示安全询问 “允许激活项目[…] 吗?”。另外还显示是否通过激活以覆盖一个项目;如果是的话,是哪一个?
如果没有相关的项目要覆盖:则需在 30 分钟之内点击是确认。
16. 显示与机器人控制系统中尚激活的项目相比较所作更改的概览。通过 详细信息复选框可以显示相关更改的详情。
17. 此概览显示安全询问 “ 您想继续吗 ?”。回答是。该项目即在机器人控制系统中激活。对此在 WorkVisual 中即显示一条确认信息。
18. 点击 结束键关闭窗口项目传输。
19. 若未在 30 分钟内回答机器人控制系统的查询,则项目仍将传输。但在机器人控制系统中不激活。在这种情况下可单独激活项目。
启动项目传输
在菜单栏中点击安装 ... 键。
键。
窗口项目传输自动打开。
也可选择通过菜单路径:工具 > 安装执行项目传输。
1. 已经通过蓝色的箭头 (3) 为真实的控制器 (4) 分配 WorkVisual 项目 (2)的控制器。
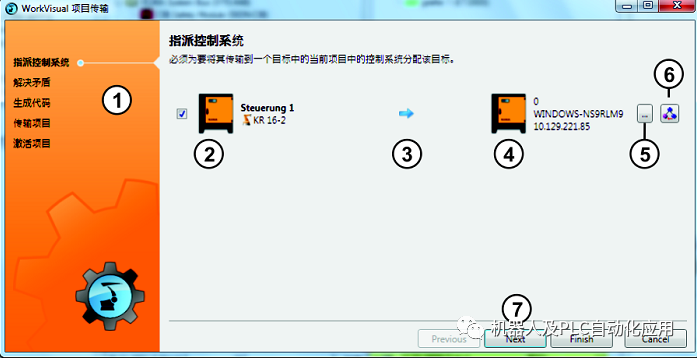
1 项目传输的过程
2 WorkVisual 项目中的控制柜
3 将项目分配到真实的控制柜上
4 设备网络中真实的控制柜
5 打开设备网络中真实控制柜的搜索窗口
6 打开项目比较的窗口
7 确认控制柜的分配
2. 用按键 继续(7) 确认分配
如果在项目传输时有冲突或矛盾,将显示一个冲突解决方案的故障排除窗口。
选择并执行建议中合适的解决方案。
在分配控制器之后,WorkVisual 将从图形配置中为控制器生成所需的*.xml 文件。
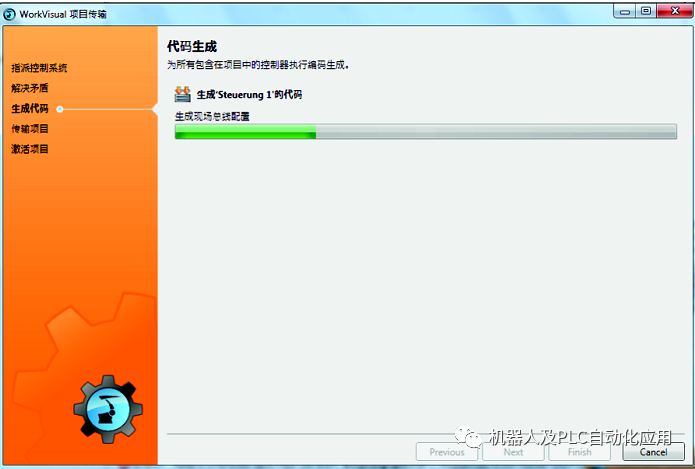
也可事先单独执行该工作步骤。菜单路径: 工具 > 生成代码
如果在生成代码时发现错误,进度条显示为红色并且中断代码的生成。
在下一个工作步骤中,已完成的项目将自动传输给控制器。

可以随时将项目传输给控制器,而无需明确的用户权限。在控制器上将它们复制到项目管理中。
如果传输期间连接中断,则也中断该工作步骤。
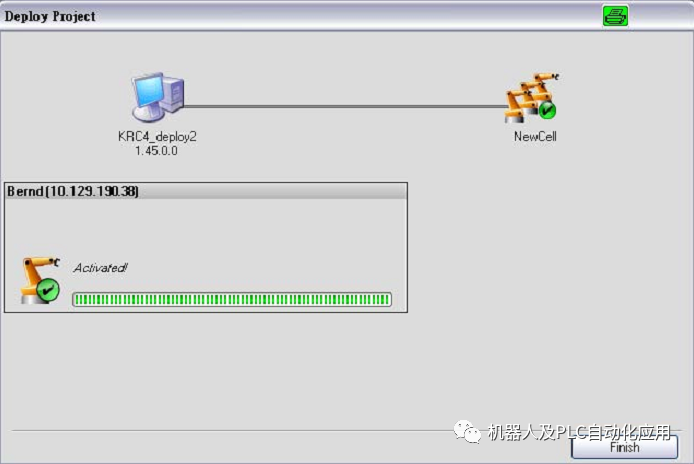
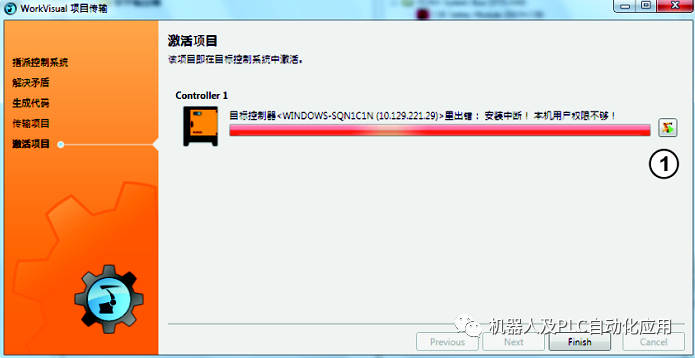
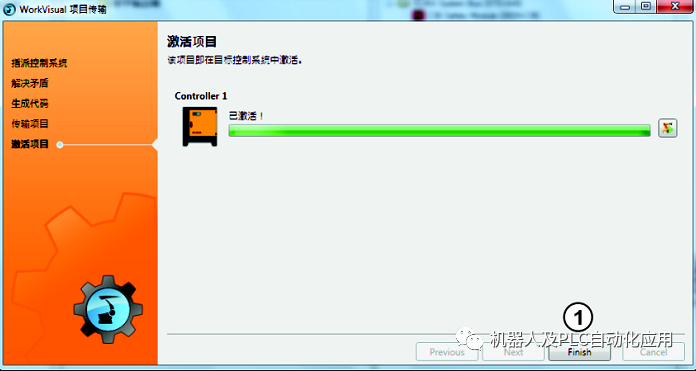
在传输项目之后,可以直接通过 WorkVisual 激活项目。如果激活失败,例如因为没有所需的控制器用户权限,可以通过图标 (1) 重新为控制器激活项目。
在成功地激活项目后,将显示绿色的进度条。用按键完成 (1) 结束向导。
若未在 30 分钟内回答机器人控制系统的查询,则项目仍将传输,但在机器人控制系统中不激活。然后可以单独激活该项目。
确认激活 SmartPad上的项目
1. 根据项目中更改的不同,会需要专家用户属性或安全投入运行。
2. 在 SmartPad 的 HMI 上显示信息“ 等待用户输入!”。
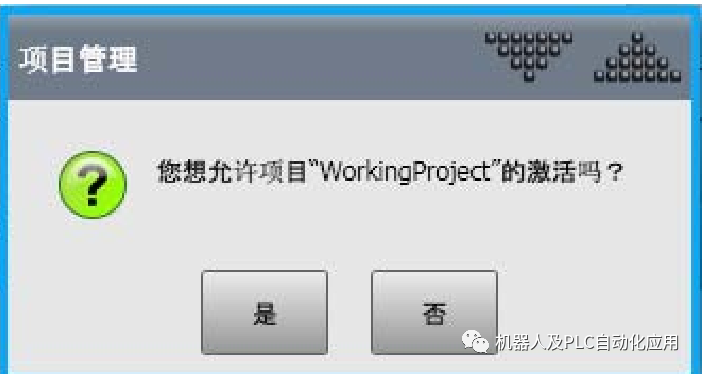
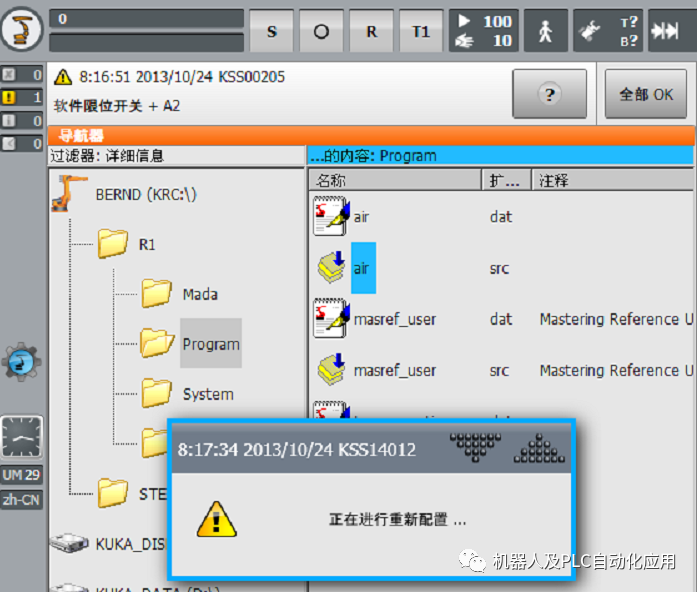
3. smartPad 上 “ 项目管理 ” 窗口自动打开和问题 “ 您允许激活 “1EG2-R04-8_2_First_Test” 项目吗?” 用“是”确认激活。
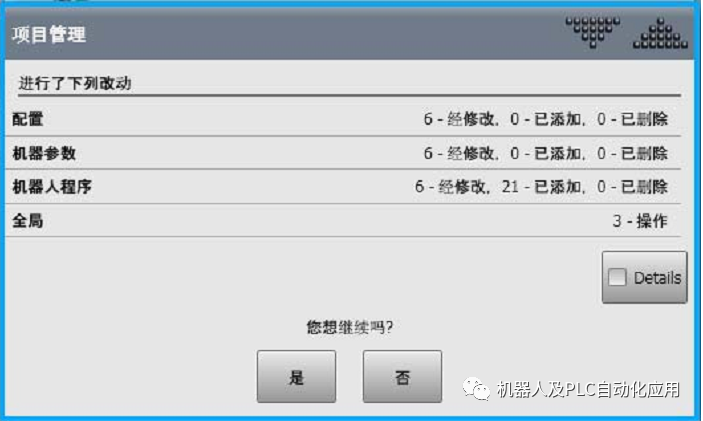
4. 显示另外一个窗口 “ 项目管理 ”。在其中显示计划的更改。用“是”回答问题“ 您想继续吗?。
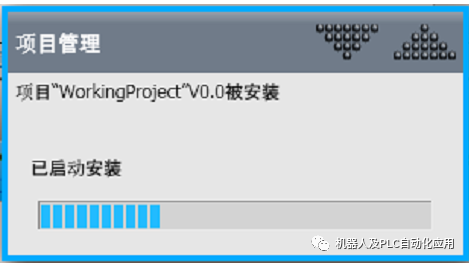
5. smartPad 上显示一条信息,即正在进行重新配置。
应用更改后的校验总和
1. 如果在 WorkVisual 中更改了安全性,例如:安全接口或安全操作参数,则将在信息窗口中显示以下故障信息:“ 安全配置的校验总和不正确”。
2. 需要安全调试员用户属性。
3. 打开安全配置。
菜单路径:KUKA 键 > 配置 > 安全配置
4. 在窗口 “ 故障排除助手 ”中选择条目“ 刚刚激活了一个 WorkVisual 项目 ”
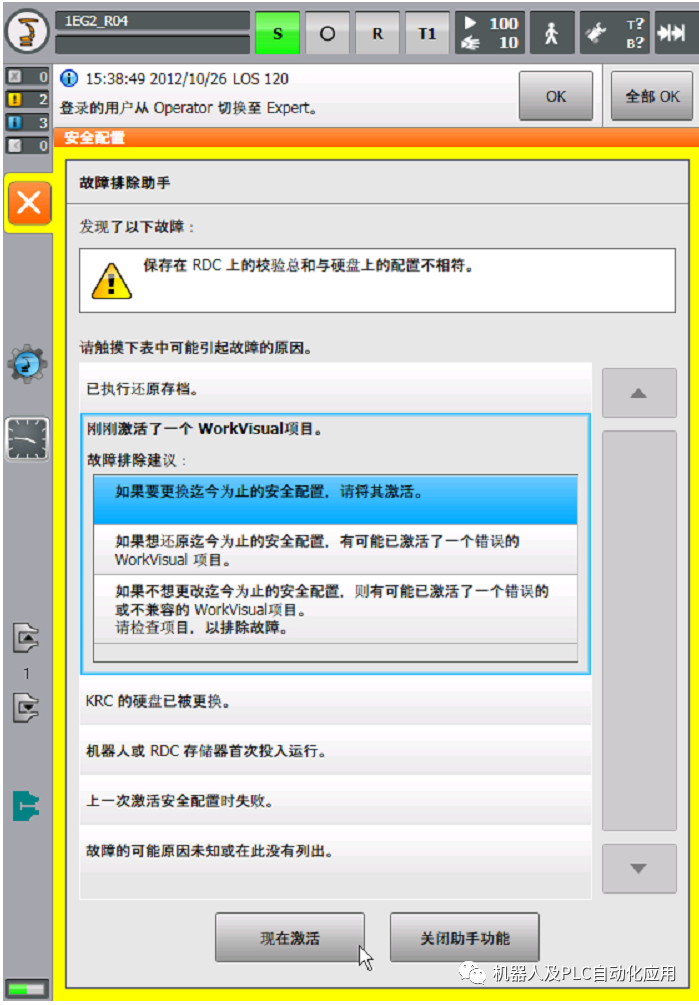
5. 接受第一个建议,按下按键 “ 现在激活 ”。
6. 在 “激活”窗口中,对问题“ 您确实想改变以下安全相关的配置部分吗?”点击“是”回答。即进行重新配置。
7. 按 “OK” 键确认 smartPad 上的信息“ 已成功保存更改 ”。
8. 应答信息 “ 应答:用 “ 全部 OK” 应答 “ 安全配置的校验总和不正确 ”。
责任编辑:彭菁
-
控制系统
+关注
关注
41文章
6605浏览量
110579 -
网络连接
+关注
关注
0文章
88浏览量
10870 -
KUKA机器人
+关注
关注
4文章
143浏览量
9072
原文标题:KUKA WorkVisual将项目传输给机器人控制系统
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论