 库卡机器人如何实现PLC外部控制
库卡机器人如何实现PLC外部控制
1、机器人与系统相连
如果机器人进程应由一个中央位置进行控制(如由一个主机或 PLC),则这一控制通过外部自动运行接口进行。
2、系统结构原理
为了在 KR C4 和 PLC 之间能够顺利进行通讯,必须满足以下几点:
外部自动运行方式:在该运行方式下由一台主机或者 PLC 控制机器人系统
CELL.SRC:从外部选择机器人程序的控制程序。
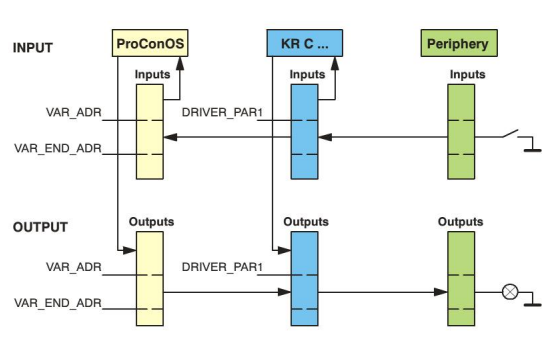
PLC 和机器人之间的信号交换: 用于配置输入和输出端信号的外部自动运行接口:
发送至机器人的控制信号(输入端): 开始和停止信号、程序编号、故障确认
机器人状态(输出端):驱动装置状态、位置、故障等等。
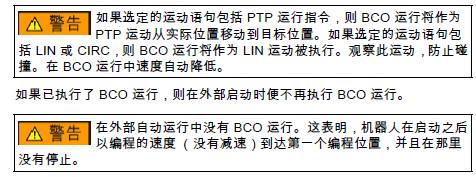
3、从外部启动程序的安全须知
选择了 CELL 程序后必须执行 BCO 运行。
4、外部程序启动的操作步骤
前提条件: 在运行方式T1或T2 下
用于外部自动运行的输入/ 输出端和 CELL.SRC 程序已配置。
1. 在导航器中选择 CELL.SRC 程序。CELL 程序始终在目录 KRC:R1 下
2. 将程序倍率设定为 100%。(以上为建议的设定值。也可根据需要设定其
它数值。)
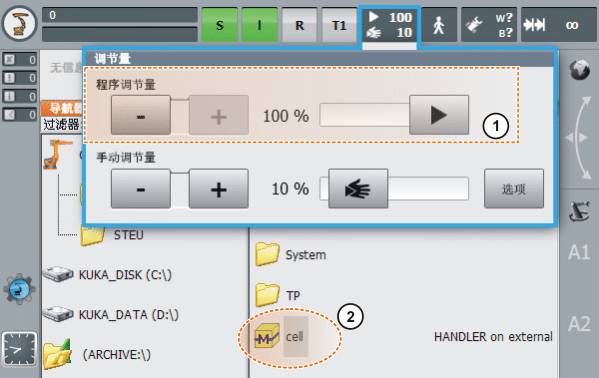
选择 Cell 和设置手动倍率
1 HOV 设置
2 选定 Cell.src
3. 执行 BCO 运行:按住确认开关。然后按住启动按键,直至信息窗显示“ 已达 BCO”。
4. 选择“ 外部自动化” 运行方式
5. 在上一级控制系统 (PLC) 处启动程序。
5、Cell.src 控制程序
管理由 PLC 传输的程序号时,需要使用控制程序 Cell.src。该程序始终位于文件夹“R1” 中。与任何常见的程序一样,Cell 程序也可以进行个性化调整,但程序的基本结构必须保持不变。
Cell 程序的结构和功能:
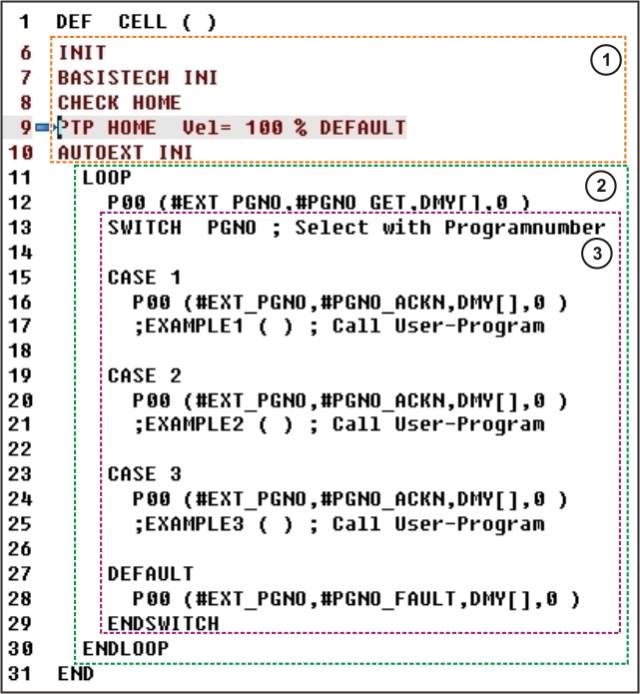
1 、初始化和 Home 位置
初始化基坐标参数
根据“Home” 位置检查机器人位置
初始化外部自动运行接口
2、无限循环:
通过模块“P00” 询问程序号
进入已经确定程序号的选择循环。
3 、程序号的选择循环
根据程序号(保存在变量“PGNO” 中)跳转至相应的分支(“CASE”) 中。
记录在分支中的机器人程序即被运行。
无效的程序号会导致程序跳转至“ 默认的” 分支中。
运行成功结束后会自动重复这一循环。
6、操作步骤
1. 切换到“ 专家” 用户组
2. 打开 CELL.SRC。
3. 在“CASE” 段中将名称“EXAMPLE” 用应从相应的程序编号调出的程序的
名称替换。删除名称前的分号。
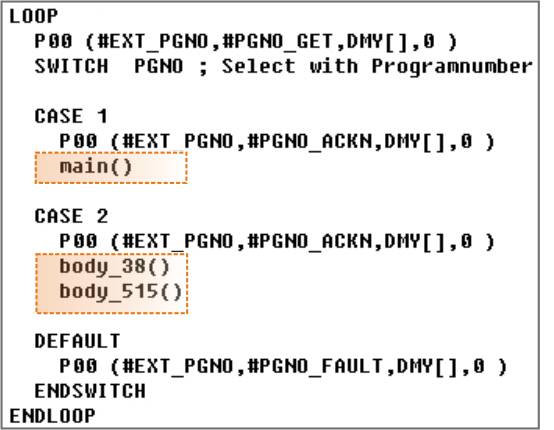
图 11-4: 经适配的 Cell 程序举例
7. 关闭程序并保存更改。
审核编辑:汤梓红
-
机器人
+关注
关注
211文章
28390浏览量
206943 -
plc
+关注
关注
5010文章
13277浏览量
463094 -
接口
+关注
关注
33文章
8580浏览量
151030 -
程序
+关注
关注
117文章
3785浏览量
81006
原文标题:【干货】库卡机器人如何实现PLC外部控制!
文章出处:【微信号:你身边的机器人专家,微信公众号:你身边的机器人专家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
酷卡机器人提示要求调零的目的是什么?
库卡KUKA机器人四种启动方式介绍
KUKA焊接机器人伺服电机常见故障及维修处理

KUKA库卡机器人MGV电源模块维修PH1013-2840






 工商网监
工商网监
评论