 基于MicroROS学习板的串口通信接收实验
基于MicroROS学习板的串口通信接收实验
你好,我是爱吃鱼香ROS的小鱼。上一节我们完成了第一个Hello World工程,学习使用了串口模块的初始化和发送,本节我们再来一个串口接收小实验,把串口收发数据补齐。
本教程所使用硬件平台为MicroROS学习板V1.0.0,可点击阅读原文购买及查看详情

一、检测并接收单个字符
1.1 代码编写
/**
* @file demo01_read_byte.cpp
* @author fishros@foxmail.com
* @brief 初始化串口,当有数据过来的时候读取并将数据打印出来
* @version 0.1
* @date 2022-12-18
*
* @copyright Copyright (c) 2022
*
*/
#include < Arduino.h >
void setup()
{
// 初始化串口
Serial.begin(115200);
}
void loop()
{
// 判断是否有有效数据,返回值是有效数据的长度
if (Serial.available())
{
// 读取一个数据
int c = Serial.read();
// -1 代表接收失败
if (c != -1)
{
// 以%c字符的格式输出接收的数据
Serial.printf("I receve %c\\n", c);
}
}
}
这里多用了一个函数Serial.available(),该函数代表当前串口中缓存有效数据的长度。
1.2 使用串口监视器发送消息
使用快捷键,编译 Ctrl+Alt+B、上传 Ctrl+Alt+U,接着准备发送数据
因为要发送消息,这里我们换一个收发分离的串口监视器来进行数据发送
使用Ctrl+Alt+~打开终端,接着在终端中你可以看到串口监视器一栏

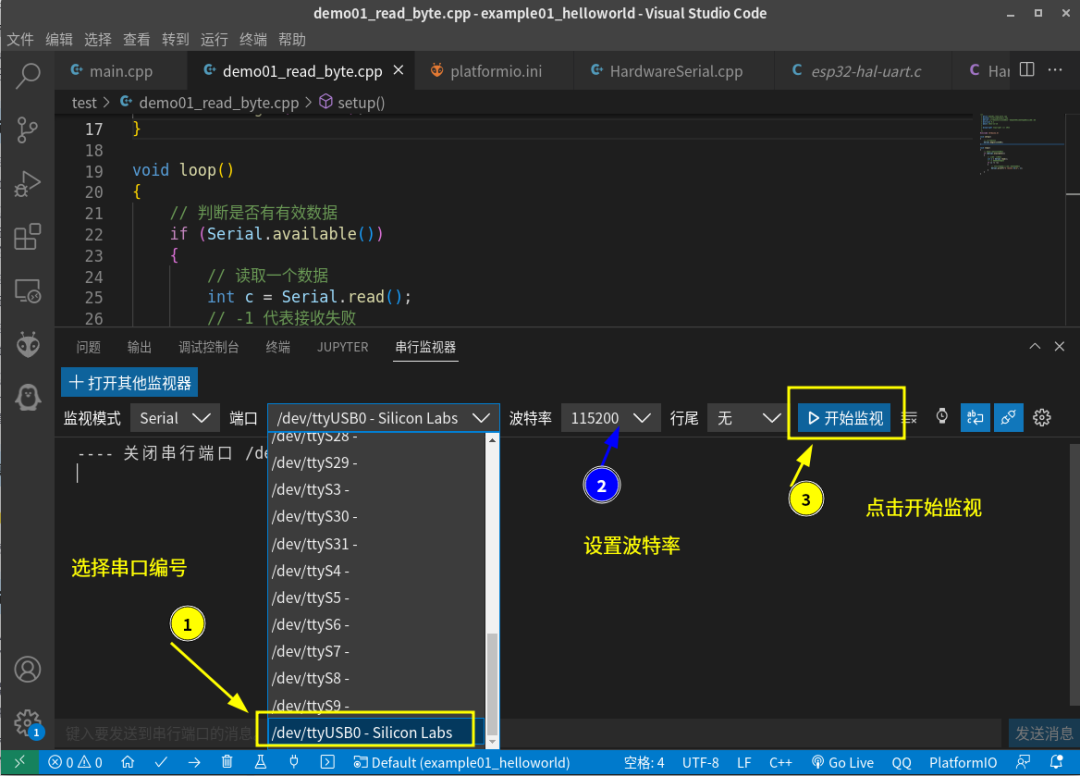
接着打开我们板子对应的串口设备
•选择串口编号
•设置波特率
•点击开始监视
发送测试
•输入数据
•点击发送
•查看返回

尝试发送12

可以看到收到了两条返回,这是因为我们每次只接收一个数据,所以即使发送12,接收数据也是一个一个接收和打印的。
那有没有办法一次性接收多个数据呢?我们换个函数即可。
二、一次性接收一串数据
2.1 代码编写
/**
* @file demo01_read_byte.cpp
* @author fishros@foxmail.com
* @brief 初始化串口,当有数据过来的时候读取并将数据打印出来
* @version 0.1
* @date 2022-12-18
*
* @copyright Copyright (c) 2022
*
*/
#include < Arduino.h >
void setup()
{
// 初始化串口
Serial.begin(115200);
}
void loop()
{
// 判断是否有有效数据
if (Serial.available())
{
// 读取一个String字符串数据
String str = Serial.readString();
// 以%s的格式输出接收的数据
Serial.printf("I receve %s\\n", str.c_str());
}
}
2.2 编译下载
点击按钮或者使用快捷键编译下载代码。
如果你在下载代码时遇到下面的错误,是因为刚刚的串口监视器没有关闭,
Auto-detected: /dev/ttyUSB0
Uploading .pio/build/featheresp32/firmware.bin
esptool.py v4.2.1
Serial port /dev/ttyUSB0
Connecting...........
serial.serialutil.SerialException: device reports readiness to read but returned no data (device disconnected or multiple access on port?)
*** [upload] Error 1
点击停止监视后,继续下载即可

2.3 测试
下载完成后,重新打开串口,接着发送一串消息

三、总结
本节我们通过两个串口接收数据小实验,学习了串口数据的接收和发送。 下一节我们开始学习如何完成点灯。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
串口通信
+关注
关注
34文章
1624浏览量
55510 -
代码
+关注
关注
30文章
4780浏览量
68529 -
学习板
+关注
关注
0文章
44浏览量
12159 -
ROS
+关注
关注
1文章
278浏览量
17001
发布评论请先 登录
相关推荐
串口通信实验分享
实验四、串口通信实验 自律学习坚强 ,拒绝迷茫。作者:行走的皮卡丘时间:2021/4/4喜欢就去追,这个红灯等不到,说不定下一个红灯等到了,嘻嘻!!!!!!!文章目录
发表于 01-14 09:08
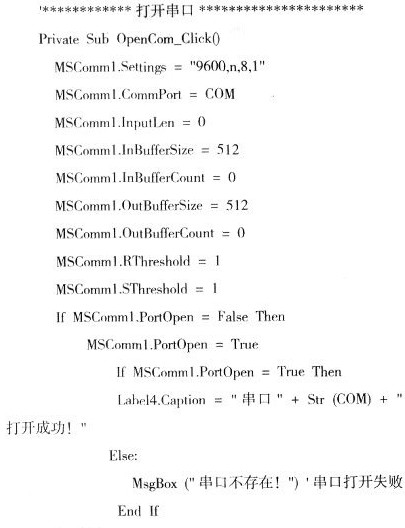
上位机串口通信数据接收事件程序
上位机 串口 通信主要介绍通信串口的初始化和串口缓冲区数据的读取,因为此处只是作为指令来读取,数据量小,所以缓冲区数据的读取为有数据
发表于 03-13 15:08
•3983次阅读

stc32G12k128使用旧清翔51实验板学习UART通信实验
stc32G12k128使用旧清翔51实验板学习UART通信实验程序,利用旧版,学习32位单片机的串口
发表于 11-21 10:21
•3次下载





 工商网监
工商网监
评论