 APM飞控固件的两种输出调试信息的方法
APM飞控固件的两种输出调试信息的方法
在无人机飞控固件开发过程中,我们经常需要实时输出一些调试信息(如一些变量的值、状态机切换提示等),在APM固件中有如下两种常用的输出调试信息的方法:
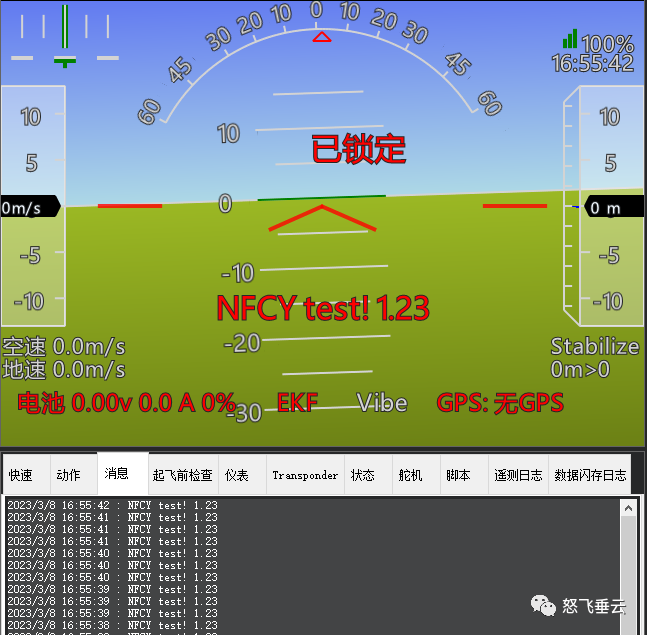
一、使用Mavlink的“STATUS TEXT”帧来发送调试信息
这个Mavlink帧的ID号为253,内部包含了50个字节的定长数据段,也就是说我们使用这个帧最多一次只能输出50个字节的字符。其调用方法如下:
gcs().send_text(MAV_SEVERITY_CRITICAL, "NFCY test! %.2f", 1.234f);
其中第一个参数定义的是要发送的数据的紧急程度,如果定义的是“MAV_SEVERITY_CRITICAL”,则要显示的信息会同时在MissionPlanner的姿态窗口和消息窗口中显示。这个函数后面两个参数的用法与C语言中的printf是一样的。
最终的显示效果如下:
二、使用“hal.console->printf”来发送调试信息
相对于第一种方法,这种方法在效率和灵活性上更接近C语言的printf,其输出直接发送到飞控USB虚拟出的串口上,因此一般直接用串口调试助手查看其输出。其用法示例如下:
hal.console- >printf("\\n\\n NFCY test! %.2f \\n\\n", 1.234f)
最终的显示效果如下:
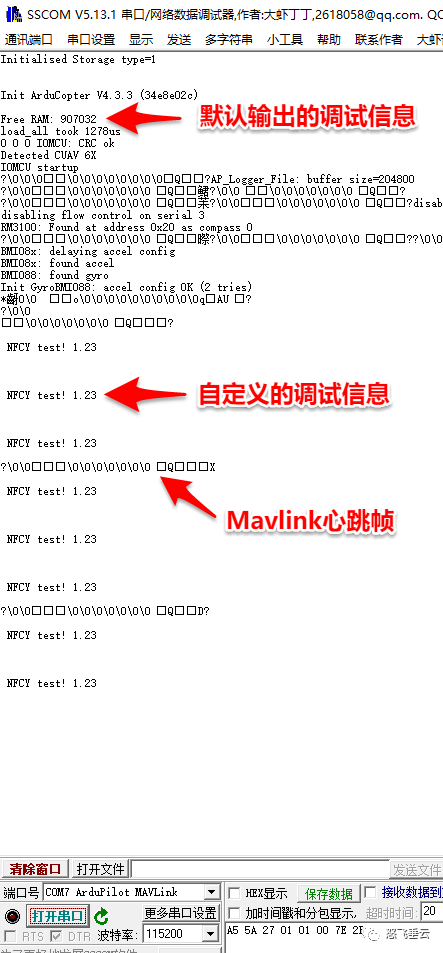
由上图可知,这种输出方法更接近平常我们用的单片机串口调试方法,但是由于默认情况下USB接口虚拟出的串口同时也输出Mavlink帧(至少有1Hz的Mavlink心跳帧),二者混在一起,看起来比较麻烦。不过可以通过关闭Mavlink输出来解决。
以上就是APM固件的两种飞控调试信息的输出方法,希望对大家有所帮助。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
调试
+关注
关注
7文章
578浏览量
33924 -
C语言
+关注
关注
180文章
7604浏览量
136711 -
状态机
+关注
关注
2文章
492浏览量
27533 -
无人机
+关注
关注
229文章
10422浏览量
180171 -
APM
+关注
关注
1文章
71浏览量
13008
发布评论请先 登录
相关推荐
嵌入式开发输出调试信息的几种方法
《论语》有云:“工欲善其事,必先利其器”。输出调试信息是软件开发中必不可少的调试利器,在出现bug时如果没有调试信息将会是一件令人头痛的事。
发表于 07-21 10:28
•923次阅读

如何利用设置断点和输出日志这两种方法去调试HarmonyOS App呢
,比较常用的有设置断点和输出日志两种方式,本文将详细介绍这两种调试App的方式。设置断点如果认为需要跟踪的代码或bug在某行代码的附近,可以单击该行代码前面的部分为该行设置断点,这时会
发表于 05-24 14:57
嵌入式开发为什么需要输出调试信息?
嵌入式开发为什么需要输出调试信息? 因为输出调试信息是嵌入式开发中一项非常重要的实践,它有助于保证软件的可靠性、稳定性和性能,也是故障排查的关键工具之一。 嵌入式开发
发表于 11-28 16:46
两种远程调试嵌入式系统的介绍
调试嵌入式系统与桌面操作系统差别很大,本文向您介绍调试嵌入式系统的两种推荐方案,插桩和片上调试,希望对您的嵌入式项目中有所帮助。我们介绍两种
发表于 04-14 07:43
•2583次阅读
英创信息威廉希尔官方网站 ARM9主板进行连接调试的两种方法
在我们提供给用户的《使用VS2005连接和调试英创ARM9嵌入式模块》一文中,我们分别以在EM9000上和在EM9260上为例讲述了两种对基于WinCE的ARM9主板进行连接调试的方法
Linux开发中如何同时输出调试信息到终端及文件
文件中。 比如: 但是有时候既要实时查看打印调试信息,又要把这些调试信息保存下来发给他人分析。 下面分享能达到这个需求的两种方法: 1、使用
适用于PIX或APM的本地升级固件方法
适用于PIX或APM的本地升级固件方法,首先打开 http://firmware.diydrones.com/ 3DR 的固件服务器。 然后选择适合自己的
发表于 08-20 16:34
•0次下载





 工商网监
工商网监
评论