 功能实用|编辑简单|CRT直坐标机器人示教编程案例
功能实用|编辑简单|CRT直坐标机器人示教编程案例
CRT-DMC630MF三轴桁架机械手示教系统是基于三轴运动控制器DMC630M的硬件平台,在公司三轴仿形示教系统成熟的威廉希尔官方网站 和广泛的市场应用的基础上,根据市场需求,采纳了广大客户的宝贵意见,并参考国内外高端同类产品的一些功能及优点,经深圳市科瑞特自动化全体同仁的共同努力,推出的一款功能齐全、使用方便灵活的高端运动控制系统。
例程要求:如图1所示:图中立方体为障碍物,加工点不能与之触碰,P1点为取料点,P2点位放料点,首先移动到P1点,取料(OT1为1),延时1000ms,检测是否取到料(IN16),若没有取到料(IN16有效)发出报警信号(OT3),直到解除报警(IN17有效),取到料后抬高到安全位(P3),移动到P4,再移动到放料点P2,放料(OT1为0),移动到P4,移动到P3,检测是否还要取料(IN18),如果IN18有效,移动到P1重复之前动作,如果IN18无效,回原点P5。
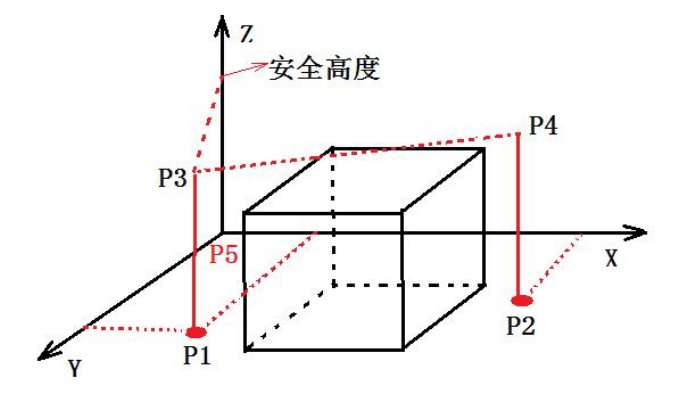 图1
图1操作步骤如下:
1.用户登录。
2.设置当前工件序号。
3.设计工艺流程:根据例程要求设计工艺流程,具体流程如图2所示。
4.编辑工艺程序:根据工艺流程编辑工艺程序 ,具体的图元指令以及指令对应的参数如 图3所示
5.轨迹采集:按照上一个例程的方法,分别采集点1~5的坐标信息。
6.运行验证:返回到“模式选择”界面,按“3”进入“运行模式”界面,按“F1”运行,然后按控制器上连接的运行按钮,观察运行结果。
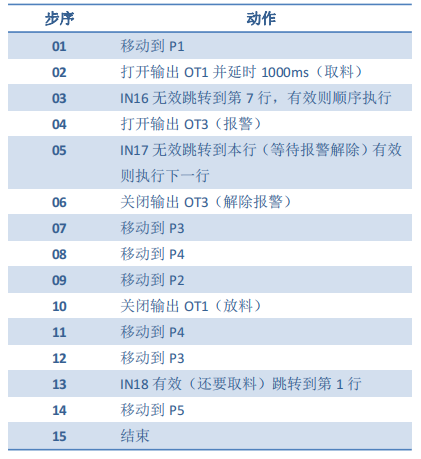 图2
图2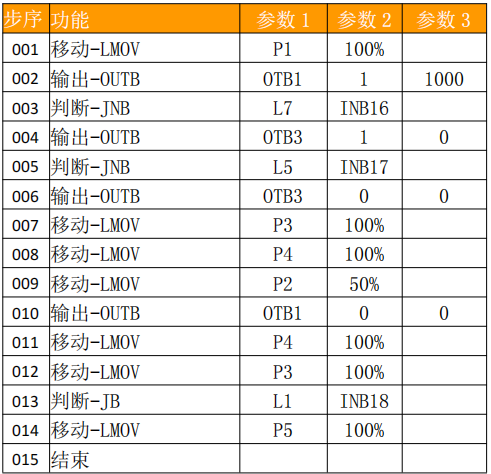 图3
图3 直坐标机器人控制系统
直坐标机器人控制系统专业提供工业自动化运动控制威廉希尔官方网站 及解决方案!
---(激光)焊接、抛光、切割、桁架机械手、等特种数控设备运动控制系统。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28418浏览量
207087
发布评论请先 登录
相关推荐
智能拖动示教喷涂机器人:威廉希尔官方网站 革新与未来展望
智能拖动示教喷涂机器人是近年来工业自动化领域的一项重要创新,它的出现不仅极大地提升了喷涂作业的效率和质量,还为传统制造业的转型升级提供了有力支持。本文将从智能拖动示

欧姆龙协作机器人TM25S可使用多种方法进行编程
按钮,即可完成位置示教。 图形化编程 TM25S可通过使用软件工具TMflow在屏幕上绘制流程图,可以轻松描述机器人的动作和处理逻辑。TMflow还可以对协作


什么是拖动示教?机器人拖动示教方式分析
多变的特点,满足制造业日益增长的复杂性要求。 机器人拖动示教,就是操作员可以直接拖着机器人各关节,运动到理想的姿态,记录下来。协作机器人是较

基于导纳控制的机器人拖动示教原理和实现步骤
过程位置,完成示教工作。 示教过程中,需要克服机器人连杆重力矩、摩擦力矩和惯性力矩。 基于动力学模型拖动示教模块主要分为

工业机器人常用的编程方式
机器人完成特定的任务。编程可以手动完成,也可以通过计算机辅助设计(CAD)软件自动生成。编程方式的选择取决于任务的复杂性、机器人的类型、以及所需的灵活性和效率。 1. 手动
工业机器人的四种编程(示教编程、离线编程、自增强现实编程主编程)剖析!
当前机器人广泛应用于焊接、装配、搬运、喷漆及打磨等领域,任务的复杂程度不断增加,而用户对产品的质量、效率的追求越来越高。在这种形式下,机器人的编程方式、编程效率和质量显得越来越重要。降

abb工业机器人的编程语言是什么
编程而设计。RAPID语言具有易学易用、功能强大、灵活性高等特点,广泛应用于ABB工业机器人的编程和应用开发。 ABB工业机器人
广和通发布机器人开发平台
广和通近日隆重发布了其全新研发的具身智能机器人开发平台——Fibot。该平台旨在满足客户在验证Mobile ALOHA协同学习与简单示教操作数据方面的需求,通过深度学习,使机械臂能够习
基于RK3568核心板的工业示教器解决方案
难的问题,且自带的监控功能可提供安全的使用保障。“示教器”是一种手持装置,广泛应用于机器人控制系统中。它通过通讯电缆连接控制柜或运动控制器,可以设置运动参数和编写机






 工商网监
工商网监
评论