 干货 | 虹科KPA MoDK运行环境与搭建步骤(1)——运行环境简介
干货 | 虹科KPA MoDK运行环境与搭建步骤(1)——运行环境简介
“虹科”工业自动化
本系列文章旨在帮助读者对虹科KPA Automation体系进行一个简要的理解,并且能使用MoDK进行快速的上手操作,包括:虹科KPA Automation、虹科KPA MoDK简介,虹科KPA MoDK的运行环境搭建与例程测试。本文档搭建的虹科KPA MoDK运行环境,是基于Win10,并且是以C/C++为开发语言进行的
01虹科KPA Automation运行体系
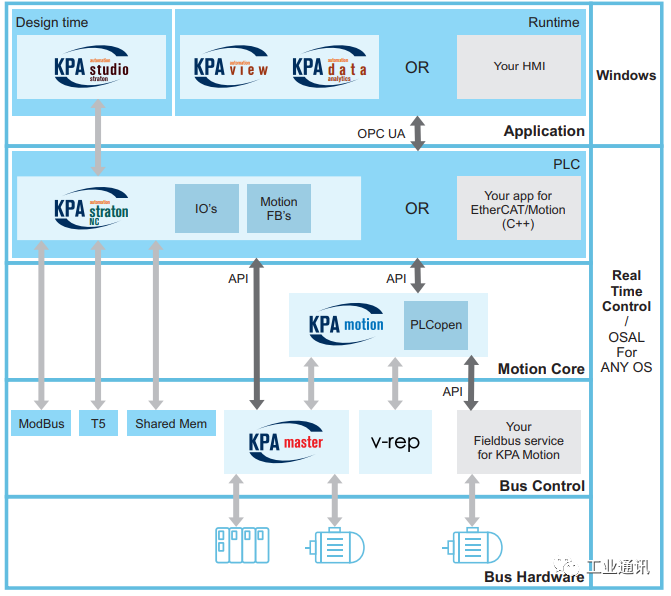
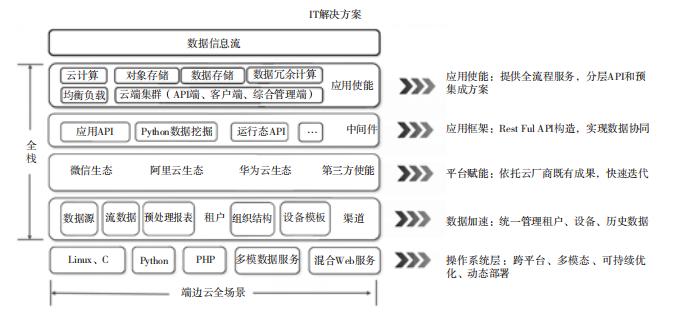
虹科KPA Automation是一套完整的控制体系,由几个层级组成,自下而上分别是:设备层、总线层、控制层、应用层。每一层功能相对独立,并提供层间交互的接口,高层的内容可以使用您自己的方法实现,如总线层使用KPA Master,控制层使用您自己的控制器。但是低层的内容不能被替换,如使用KPA motion而不使用KPA Master,这种方式不可行。
每一层的作用简要如下:
设备层
实际的被控设备,由总线层进行数据收发。
总线层
接收来自控制层/设备层的数据,并转发至设备层/控制层,目前支持的总线协议有:EtherCAT、ModBus、CAN、CANopen、PROFIBUS。具体支持的协议类型,还与控制层具体所选的控制器相关。MoDK也支持使用VREP机器人仿真平台。
控制层
控制器所在的层级,可灵活选择多种类型的控制器。可以选择KPA Straton,结合MoDK/MDK时也可以选用C/C++应用程序。
应用层
主要用于数据的采集、监控和分析。
02虹科KPA MoDK简介
虹科KPA MoDK在虹科KPA Automation控制体系中处于控制层一级,是控制系统中可选的一个模块。结合虹科KPA Straton时,使用的是5种标准PLC语言开发,MoDK以功能块的形式呈现;直接使用C/C++进行开发时,MoDK则以独立的开发包/库形式呈现。
MoDK的功能块/函数接口完全符合PLCopen part1/part4标准,使用Straton进行开发时,只需按顺序调用功能块即可:初始化环境→初始化轴实例→运动控制;使用C/C++开发时的流程也类似,但是每一步的API调用则要遵循以下顺序:功能块变量声明→功能块实体创建→调用功能块。具体的流程将在后续更新中详细阐述。
虹科KPA MoDK目前支持的PLCopen运动控制函数如下:
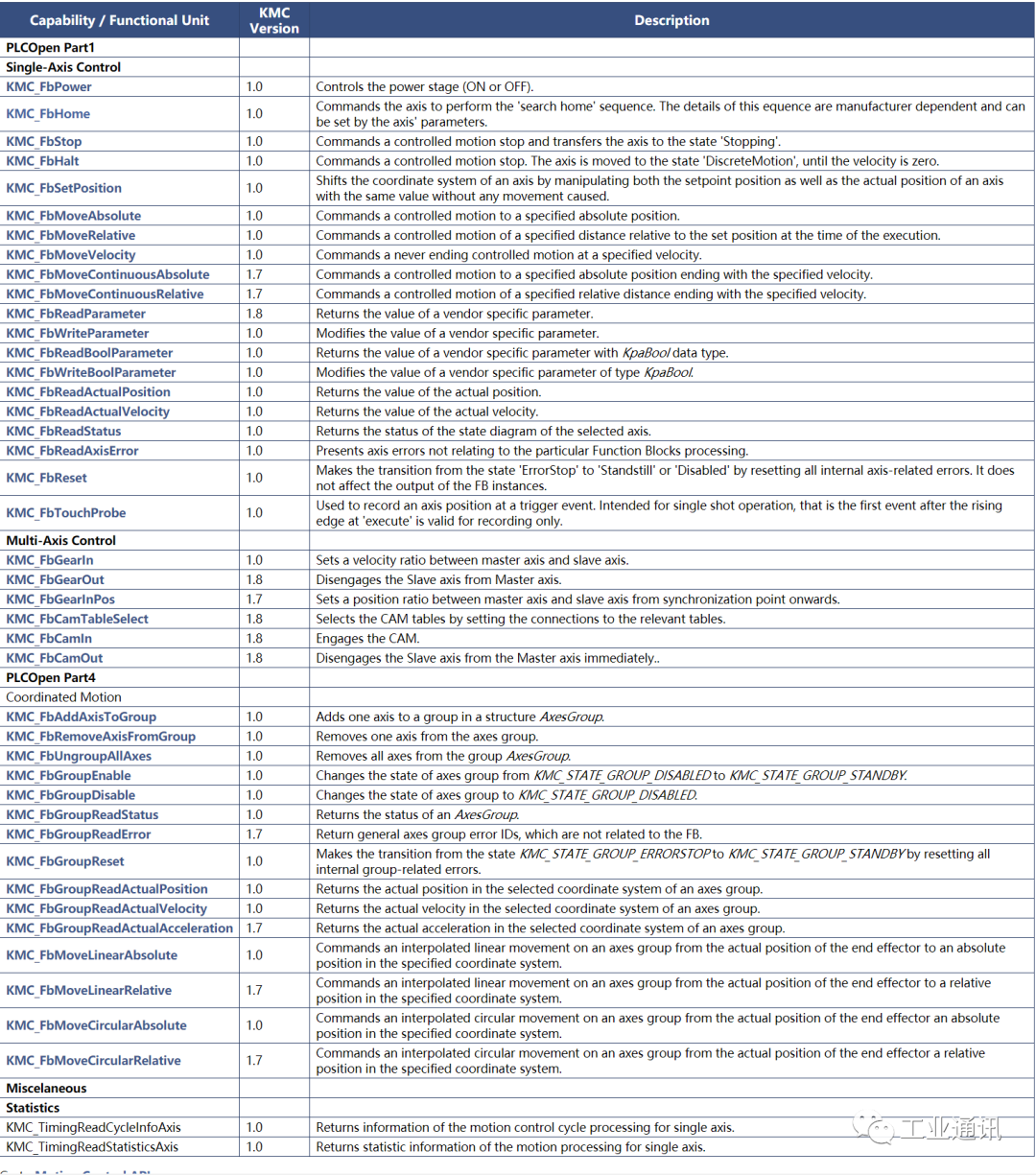 可以看到MoDK涵盖了PLCopen part1/part4中的绝大多数功能块,并有性能优异的路径生成器,使得控制循环能低于1ms,能满足绝大多数的应用需求。
可以看到MoDK涵盖了PLCopen part1/part4中的绝大多数功能块,并有性能优异的路径生成器,使得控制循环能低于1ms,能满足绝大多数的应用需求。虹科KPA MoDK的特性
1
虹科MoDK立足于虹科KPA自研的可扩展OSAL(操作系统抽象层),只要使用不同的OSAL库文件进行编译,即可运行于多种操作系统下。
2
最多支持三轴联动,点对点的轴控制理论上不限制轴数,仅取决于运行平台的性能。
3
控制循环低于1ms,同时拥有优秀的路径生成器。
4
Motion函数遵循PLCopen part1/part4标准编写,可集成于虹科KPA Straton环境中,使用PLC语言编程,更加容易上手使用;也可以跳脱出Straton环境,以C/C++库形式提供开发包,使用计算机语言开发。
5
支持虹科KPA matser 1.x/暂不支持2.x版本。
6
支持控制3种对象:Simulation 虹科KPA 运行环境内部仿真(纯文字参数仿真)/Vrep机器人仿真平台/ECAT & CiA402设备。
7
初始化参数可以在Studio中的Motion Configuration Utility进行配置,减少初始化过程中的代码量,并可以在运行过程中动态调整运动参数的最大值(如速度、加速度、加加速度)。
8
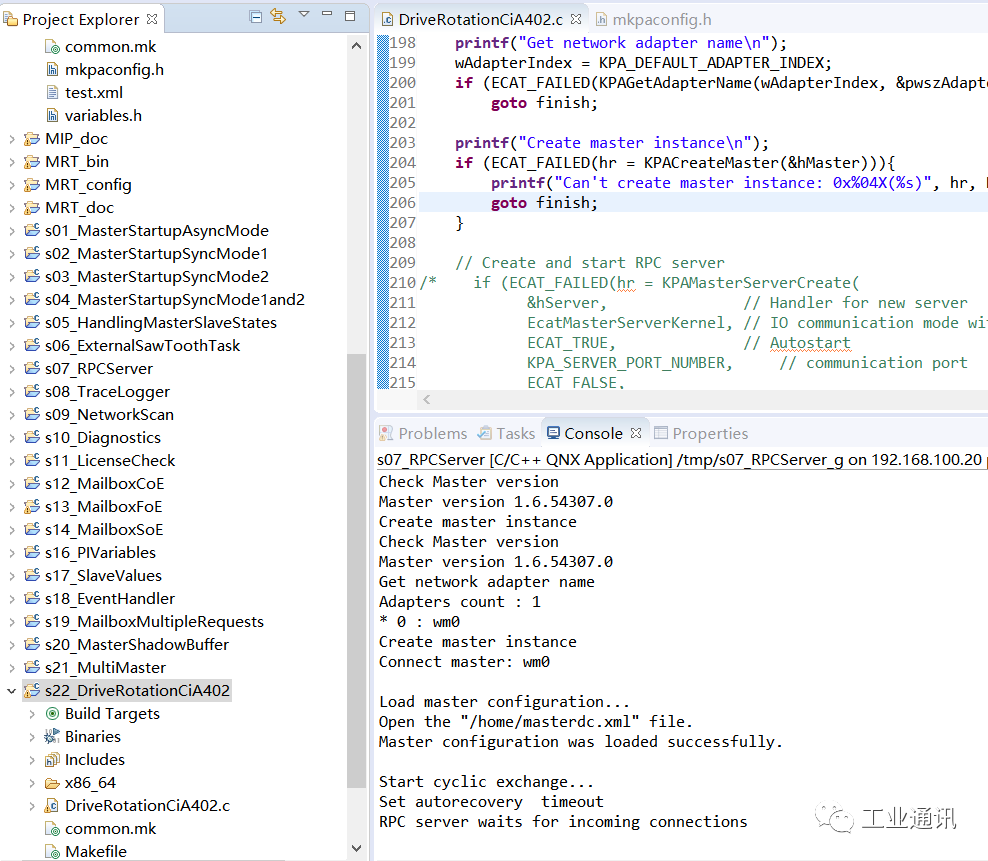
C/C++开发提供22个演示例程,涵盖了motion的绝大多数功能,使用CMAKE设置参数进行编译,可以得到不同平台、不同操作系统下的工程文件,可直接进行演示。
-
自动化
+关注
关注
29文章
5578浏览量
79281
发布评论请先 登录
相关推荐
如何搭建企业AI开发环境
干货!基于RK3568的 AI 人工智能环境搭建步骤
【MM32F5270】Keil开发环境搭建
Docker运行环境安装
pycharm配置pytorch运行环境
pytorch环境搭建详细步骤
PyTorch深度学习开发环境搭建指南
请问Eclipse环境如何搭建IoT Solution?
虹科干货 | 多设备协同无忧:Linux环境下PCAN固定设备ID/通道分配指南

UEFIRC:运行于UEFI环境下的IRC聊天室
云服务器的linux中如何搭建php运行环境?
10kV站所柜内运行状态及环境指标监测管理平台分析与实现
使用VeriStand搭建MIL测试环境





 工商网监
工商网监
评论