 有源钳位反激(ACF)变换器控制方案(4)
有源钳位反激(ACF)变换器控制方案(4)
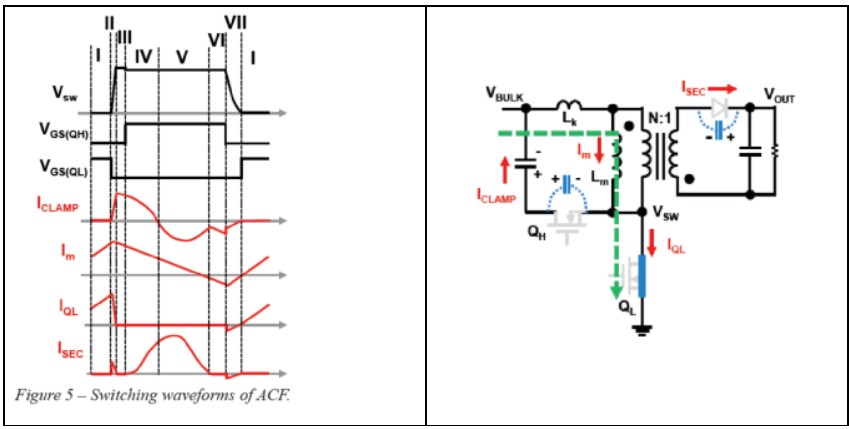
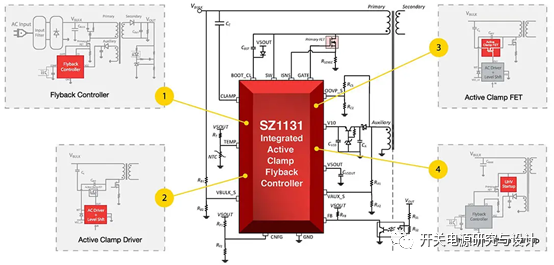
如前几期内容所述,ACF要实现高效率就必须满足功率管ZVS的需求。要实现ZVS就需要采用合适的控制方案。前几期中的控制策略在实现ZVS方面基本都是直接或间接的调节钳位管的导通时间,增大谷值电流,从而实现主功率管ZVS。这期内容中所采用的动态谐振周期控制(dynamic resonant periodcontrol, DRPC)策略也是通过调节钳位管的导通时间而调节谷值电流实现的,但是不同的是,该控制策略让ACF工作在非互补模式,从而降低钳位管的导通损耗,实现效率的更优化。该控制方法由台湾交通大学提出,所采用控制框图如图1所示,具体的控制模式简述如下。
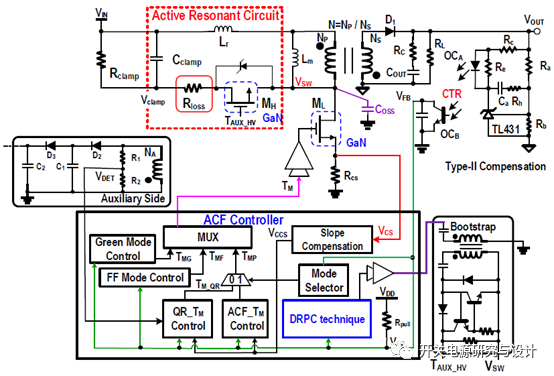
图1 DRPC控制框图
1. 重载下的DPRC模式
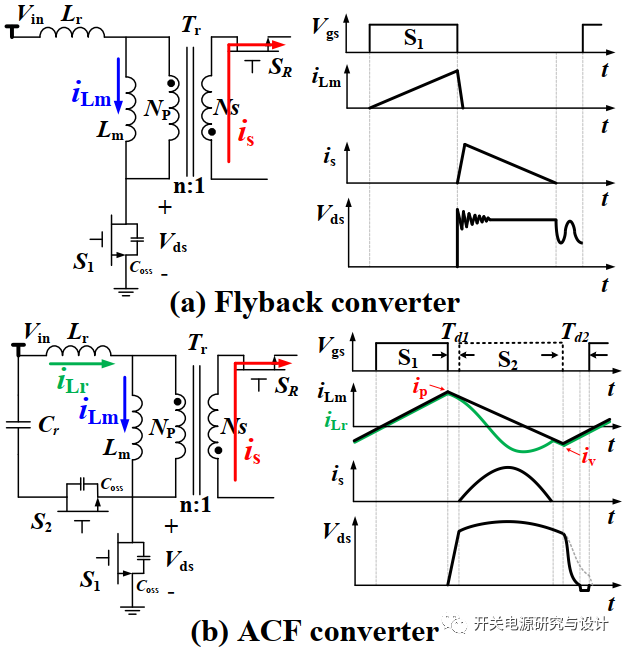
该模式下,ACF的栅驱动信号非互补导通输出,见图2所示。其中Tm为主功率管ML工作波形,Taux为钳位管MH工作波形。Taux只在Tm为0的第③区域为高电平,这样的好处在于可以尽可能的降低谐振电流的有效值,从而产生较小的钳位管导通损耗。通过调节Taux的时间长度,可以调节谷值电流的大小。只要Taux的时间调节足够精确,就可以使ACF在全输入电压范围下都能够恰好实现ZVS。这样,通过这种控制方式,即降低了死区损耗的大小,也降低了钳位管损耗的大小,从而可以进一步优化效率。
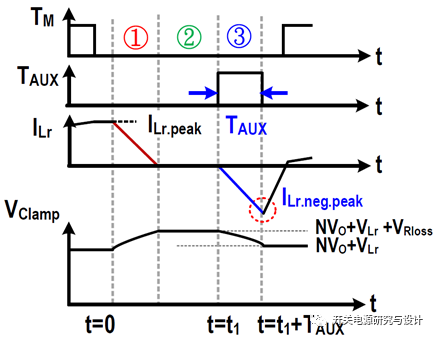
图2 DRPC下ACF工作波形
2. 中载下的QR模式
当负载下降到一定范围时,ACF将工作在传统反激的准谐振QR工作模式,波形见图3。在该模式下,Tm的时间长度基本不变,通过调节Tm的开通位置实现谷值导通。这样,系统工作在轻微变频状态,从而使输出电压能够在不同负载保持稳定。
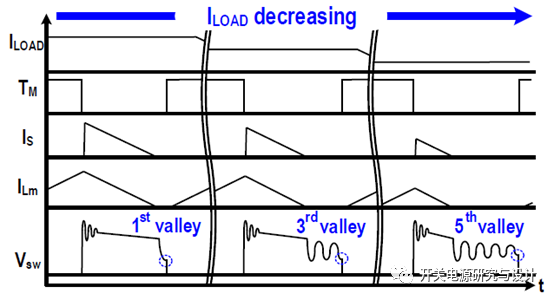
图3 QR下的ACF工作波形
3. 轻载下的FF模式
当负载进一步下降时,系统工作在频率折叠(frequency-foldback,FF)模式。该模式和QR刚好相反,谷底导通的位置保持不变,都在第六个谷底时开通主功率管,但Tm的导通时间不断减小,用于实现不同负载下的调节。该模式下的频率变化比QR变化剧烈。
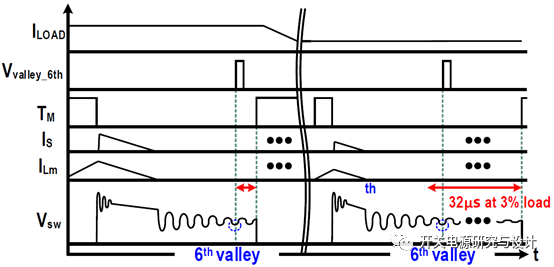
图4 FF下的ACF工作波形
4. 待机下的绿色模式
当负载非常小时,ACF工作在绿色模式。该模式下,Tm的导通时间保持不变,开关频率保持不变。
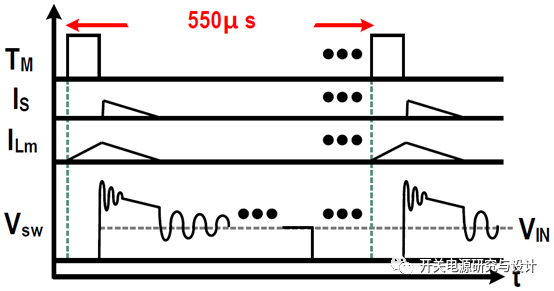
图5 绿色模式下的ACF工作波形
通过这四个工作模式,ACF既实现在不同负载下的稳压调节目标,也实现ZVS的调节功能,实现较高的效率工作。开关频率的变化曲线如图6所示。
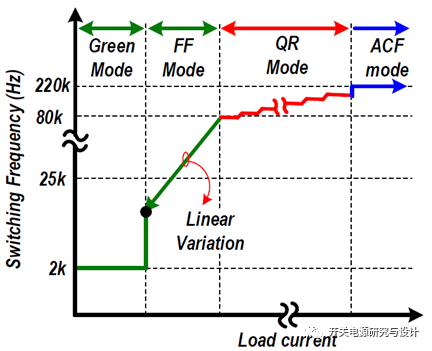
图6 该控制方式下的频率变化曲线
该控制方式的优缺点简单分析如下:
1) ACF真正实现ZVS的负载范围较窄,只能在DRPC模式下实现。虽然可以提高重载下ACF的峰值效率,但ACF的平均效率预估较低;
2) DRPC模式下实现ACF的能量主要依靠漏感中的能量,需要漏感大于一定的值,ZVS才可以在全输入范围内轻松实现;
3) DRPC模式下副边电流出现“双包”波形,不利于同步整流控制;
4) DRPC模式下钳位管并不是严格的ZVS开启,可能会增大钳位管开关损耗;
5) DRPC模式下钳位管具有较长的续流时间,不适合采用GaN半导体功率器件;
6) QR模式和FF模式下的谷底导通位置对控制要求较高,也需要考虑实际电路参数的漂移影响;
7)频率变化范围较宽,不利于磁性元件设计。
-
负载
+关注
关注
2文章
566浏览量
34351 -
变换器
+关注
关注
17文章
2098浏览量
109305 -
ZVS
+关注
关注
28文章
84浏览量
56542 -
反激变换器
+关注
关注
2文章
145浏览量
18196 -
ACF
+关注
关注
1文章
24浏览量
10729
发布评论请先 登录
相关推荐
ACF与AHB反激变换器优缺点的对比分析
Silanna Semiconductor宣布扩展有源钳位反激控制器(ACF)产品系列

有源钳位反激(ACF)变换器控制方案(2)
有源钳位反激(ACF)变换器控制方案(3)
ACF与AHB反激变换器的优缺点对比





 工商网监
工商网监
评论