 三菱定位模块FX3U-1PG案例分享
三菱定位模块FX3U-1PG案例分享
1功能应用场合
控制要求:在FX3U本体的3个脉冲轴用完了,还需要在加一个轴的情况,要求这个轴既能手动控制也能自动控制伺服轴,自动控制,伺服目标点位可以更改。
2硬件设备
1、三菱PLC
2、FX3U-1PG模块
3、伺服驱动器
3软件
1、GX Work2
2、MR - Configurator2
4三菱PLC控制要求分析和选型
控制要求分析和选型:分析需要添加一个轴的定位,避免浪费,且后期不需要做添加轴的情况下,我们这里添加FX3U-1PG这个模块,这个模块控制一个轴,控制采用FX3U-1PG模块。
5三菱PLC模块IO口分配
PLC的IO口分配
| IO点 | IO注释 |
| X0 | 复位信号 |
| X1 | 电机停止信号 |
| X2 | 电机正转极限 |
| X3 | 电机反转极限 |
| X4 | 正方向点动 |
| X5 | 反方向点动 |
| X6 | 电机回原点 |
| X7 | 定位启动 |
FX3U-1PG脉冲模块指示灯含义
| 字符 | 名称 | 颜色 | 状态 | 含义 |
| POWER | 电源指示灯 | 绿灯 | 灭灯 | 可编程控制器没有供应DC5V |
| 亮灯 | 可编程控制器正在供应DC5V | |||
| STOP | 停止 | 红灯 | 灭灯 | STOP输入OFF |
| 亮灯 | STOP输入ON | |||
| DOG | 原点信号 | 红灯 | 灭灯 | DOG输入OFF |
| 亮灯 | DOG输入ON | |||
| PG0 | 零点信号 | 红灯 | 灭灯 | 零点信号OFF |
| 亮灯 | 零点信号ON | |||
| FP | 正脉冲指示 | 红灯 | 灭灯 | 正转脉冲或脉冲串停止中 |
| 闪烁 | 正转脉冲或脉冲串输出中 | |||
| 亮灯 | 旋转方向输出中 | |||
| RP | 反转脉冲指示 | 红灯 | 灭灯 | 反转脉冲或脉冲串停止中 |
| 闪烁 | 反转脉冲或脉冲串输出中 | |||
| 亮灯 | 旋转方向输出中 | |||
| CLR | CLR信号 | 红灯 | 灭灯 | CLR信号输出停止中 |
| 亮灯 | CLR信号输出中 | |||
| ERR | 错误指示灯 | 红灯 | 灭灯 | 正常动作中 |
| 闪烁 | 错误发生中 | |||
| 亮灯 | CPU错误发生中 |
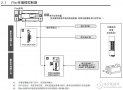
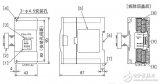
FX3U-1PG 端子含义
| 名称 | 含义 | 名称 | 含义 |
| VIN | 脉冲输出用电源端子 | PG0+ | 零点信号用电源端子 |
| COM0 | 脉冲输出用公共端子 | COM1 | CLR信号输出用公共端子 |
| FP | 正转脉冲或脉冲串输出端子 | CLR | CLR信号输出用端子 |
| RP | 反转脉冲或旋转方向输出端子 | STOP | STOP或中断输入1用端子 |
| PG0- | 零点信号用输入端子 | DOG | DOG或中断输入0用端子 |
重要缓冲存储器
| BFM编号 | 位编号 | 项目 | 内容 |
| #25 | b0 | 错误复位 |
发生错误时置为 ON后,将错误标志位、错误代码 和定位结束标志位复位。(仅发生错误时有效) |
| b1 | STOP |
定位运行时(包括 JOG运行、机械原点回归运行) 置为ON后停止。 |
|
| b2 | 正转限位 | 正转脉冲输出中置为ON后停止。 用于在正转限位位置停止。 | |
| b3 | 反转限位 | 反转脉冲输出中置为ON后停止。 用于在反转限位位置停止。 | |
| b4 | 正转JOG运行 | 置为ON后向当前地址增加方向输出脉冲。置为OFF后停止脉冲。 | |
| b5 | 反转JOG运行 | 置为ON后向当前地址减少方向输出脉冲。置为OFF后停止脉冲。 | |
| b6 | DOG式机械原点 | 回归运行开始 置为ON后开始DOG式机械原点回归运行。 | |
| b7 | 相对/绝对地址 |
选择指定绝对地址或指定相对地址。 OFF:通过指定绝对地址运行。 ON:通过指定相对地址运行。 |
|
| b8 | 1速定位运行开始 | 置为ON后开始1速定位运行。 | |
| b9 | 中断1 速定位运行 | 开始 置为ON后开始中断1速定位运行。 | |
| b10 | 2速定位运行开始 | 置为ON后开始2速定位运行。 | |
| b11 | 外部指令定位运行 | 开始 置为ON后开始外部指令定位运行。 | |
| b12 | 可变速运行 | ON:开始可变速运行。 OFF:停止可变速运行。 | |
| b13 | 中断停止运行开始 | 置为ON后开始中断停止运行。 | |
| b14 | 中断2 速定位运行 | 开始 置为ON后开始中断2速定位运行。 | |
| b15 | 数据集式 | 机械原点回归运行 开始 置为ON后开始数据集式机械原点回归运行。 | |
| #28 | b0 | READY |
可进行定位运行时,置为ON。 • 置为ON的条件 - 电源启动时 - 定位结束时 - 定位运行中因STOP指令停止中 - 错误复位时 置为OFF的条件 - 定位运行中 - 发生错误时 |
| b1 | 正转/反转 |
ON:正转脉冲输出中ON 正转脉冲停止后仍然保持ON状态。 OFF:反转脉冲输出中OFF 反转脉冲停止后仍然保持OFF状态。 |
|
| b2 | 原点回归 |
已执行 原点回归结束时,置为ON。 置为ON的条件 - DOG式机械原点回归结束时 - 数据集式机械原点回归结束时 置为OFF的条件 - 电源OFF - 在状态信息中写入K0时 |
|
| b3 | STOP |
ON:STOP输入ON OFF:STOP输入OFF 与1PG的STOP端子ON/OFF状态相同。 |
|
| b4 | DOG输入ON | ON:DOG输入ON OFF:DOG输入OFF与1PG的DOG端子ON/OFF状态相同。 | |
| b5 | PG0输入ON | ON:PG0输入ON OFF:PG0输入OFF 与1PG的PG0端子ON/OFF状态相同。 | |
| b6 | 当前值溢出 | 当前地址(BFM#27、#26或 BFM#59、#58)的值超出±32 位数据的范围时,置为ON。 | |
| b7 | 错误标志位 | 发生错误时置为 ON,在错误代码(BFM#29)中储存错误 代码编号。执行电源OFF或错误复位(BFM25 b0)后置为OFF。 | |
| b8 | 定位结束 标志位 |
定位运行正常结束时,置为ON。 机械原点回归运行开始、定位运行开始(可变速运行除 外)或错误复位(仅发生错误时)置为OFF。 |
|
| b9 | 第1速结束 标志位 |
2速定位、外部指令定位或中断2速定位运行的第1速运 行结束时,置为ON。置为ON的条件 - 2速定位、外部指令定位或中断2速定位运行的第 1速结束时 • 置为OFF的条件 - 定位结束时 - 发生错误时 - 取消剩余距离运行时 - 不进行剩余距离运行时(BFM#3 b15或#37 b15为 ON),以STOP指令减速停止时 |
|
| b10 | 中断输入0 |
ON:在中断输入0有效的运行模式中,检测到中断输入0 时置为ON。OFF:下次运行开始时置为OFF。 |
|
| b11 | 中断输入1 |
ON:在中断输入1有效的运行模式中,检测到中断输入1 时置为ON。 OFF:下次运行开始时置为OFF。 |
|
| b12 | 剩余距离运行 | 待机中 定位运行(1 速定位运行、2 速定位运行、中断停止运 行)中的STOP输入后减速停止,在剩余距离待机中置为 ON。执行重新开始指令或者向BFM#25以外的BFM写入后置位OFF。 | |
| b13 ~b15 | 不可使用 |
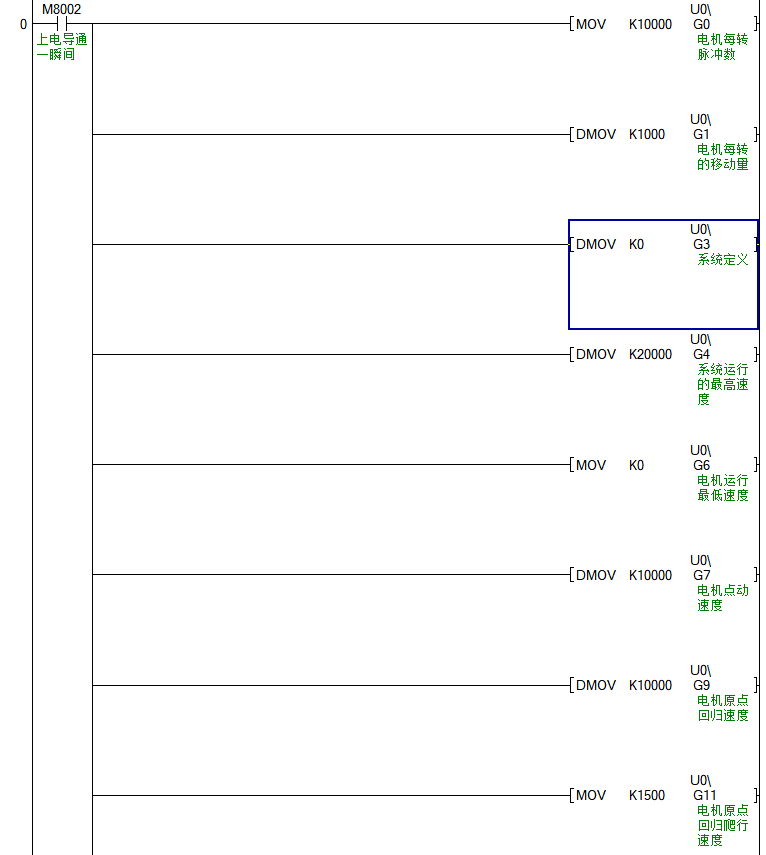
6三菱PLC配方编程实例
程序分析:在上电就设置电机每转需要的脉冲数,电机每转移动量,外部电机控制类型,伺服电机的运行最高速度,电机运行的最低速度,电机点动运行速度,电机回原点的一个速度和爬行速度。
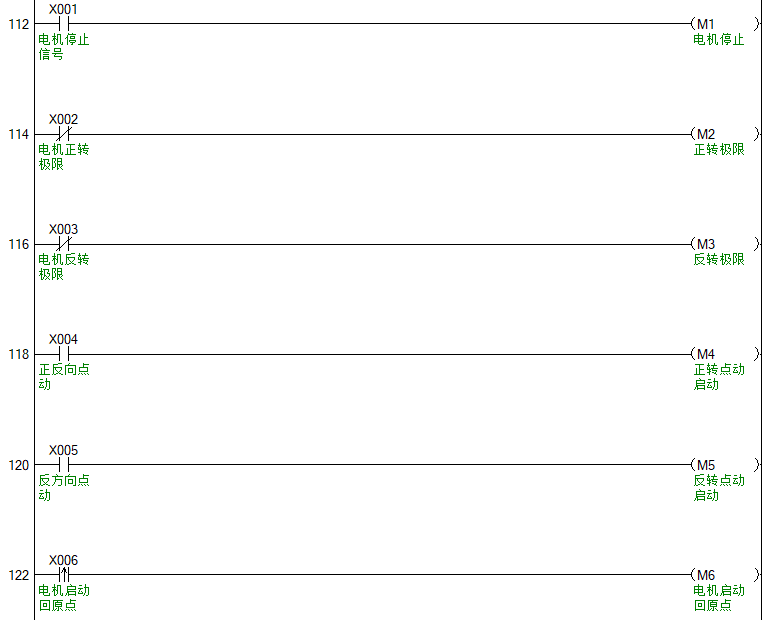
外部输入信号传送到M辅助继电器,一方面是修改外部输入点的时候更容易,另一方面,是后面的辅助继电器,更好的使用位组合元件。
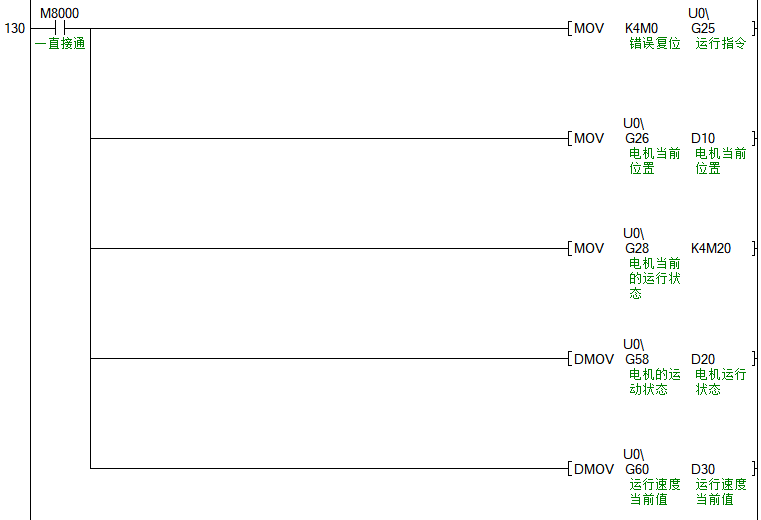
将输入的信号,进行位组合后传到运行状态的特殊寄存器中,用于控制电机的各种运动,详细参考上面U0G25的每个位的含义。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
plc
+关注
关注
5010文章
13277浏览量
463117 -
三菱
+关注
关注
32文章
803浏览量
42798 -
IO口
+关注
关注
3文章
170浏览量
24025 -
伺服驱动器
+关注
关注
22文章
481浏览量
31546 -
定位模块
+关注
关注
0文章
104浏览量
16364
原文标题:【案例分享】三菱定位模块FX3U-1PG
文章出处:【微信号:跟我学PLC,微信公众号:跟我学PLC吧】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
浙江回收三菱PLC 扩展模块FX2N-16EX 三菱可编程控制器
AJ65SBTB1-16DT,回收三菱plc定位模块 FX3U-1PG ,回收OMRON欧姆龙PLC模块
发表于 07-21 13:00
专业回收三菱FX3u可编程控制器,求购三菱Q系列CPU模块
,高价回收三菱伺服驱动器,J2S系列,J3系列,JE系列,J4系列。回收三菱MITSUBISHI PLC 模块AJ65SBTB1-16DT,
发表于 08-04 13:54
基于FX3U-1PG构成及接线
FX3U-1PG型脉冲输出模块(以下简称1PG)是一种特殊功能模块,最大输出200kHz的脉冲串,通过单轴伺服放大器或步进电机驱动器,驱动伺服电机或步进电机。特点:
发表于 09-29 18:38
•65次下载
Labview如何通过NI OPC与三菱FX3U PLC进行通讯
本文档的详细介绍的是Labview如何通过NI OPC与三菱FX3U PLC进行通讯。
软件环境:LabVIEW 2014,OPC Servers 2013
硬件条件:三菱 FX3U
发表于 01-09 08:00
•163次下载
FX3U 1PG用户手册
。本手册针对FX3U-1PG型脉冲输出模块的使用进行介绍。在使
用之前,请阅读本书以及相关产品的手册,希望在充分理解其规格的前提下正确使用产品。
发表于 08-24 15:37
•7次下载

通过PLC网关如何实现三菱FX3U的远程上下载程序?
FX3U是三菱推出的高性能PLC品牌。基本性能大幅提升,晶体管输出型的基本单元内置了3轴独立最高100kHz的定位功能,并且增加了新的定位指
FX3U系列三菱PLC的应用实例
在工业自动化领域中,三菱电机株式会社生产的FX3U系列PLC因其高性能、高可靠性和易用性而备受青睐。FX3U系列PLC拥有强大的处理能力和丰富的功能,广泛应用于各种工业自动化控制系统中。本文将结合





 工商网监
工商网监
评论