 某水下机器人供电系统干扰改善方案浅析
某水下机器人供电系统干扰改善方案浅析
在工业级应用市场,未来很多高危、复杂、长时间或其他人力无法胜任的水下工作将逐步被水下机器人替代。水下机器人供电尺寸紧凑、输出功率高、防水抗压能力强和可靠性要求高等一系列特点决定其内部供电系统主要由高可靠性传导冷却的模块电源提供。
在实际应用过程中,模块电源需要匹配合理的外围电路后才能正常工作。很多应用模块电源的客户因为缺乏足够的使用经验,常常在应用过程中遇到各种干扰问题,严重时将导致整体供电系统功能降级甚至故障。
如何才能确保机器人内部供电平台搭建简便且合理可靠呢?除了选择大品牌的高可靠性模块电源产品之外,项目初期能够获得良好的威廉希尔官方网站 沟通服务更是产品供电长期稳定性的重要保障。
下面分享某水下机器人供电干扰改善案例,从外围电路中关键的接地部分出发,简单分析故障干扰成因,简化干扰传播路径模型并提出相应的改善方案。
1. 问题描述:
某水下机器人客户在原型机型式试验中频繁遇到重载干扰问题。具体故障现象为水下机器人重载运行时,容易出现电机扭矩不足故障,失去大部分动力储备。
2. 原因分析:
实际测量机器人内部模块电源输出电压后,当出现电机扭矩不足故障时,电源的输出电压已远低于正常设定值,但此时实际输出电流尚未达到满载。初步怀疑为模块电源内部过流保护功能受干扰后误动作。
仔细检查客户模块外围电路布局后发现接地部分布局不当,特别是模块周边Y电容引脚端接地不良,额外引入的接地高频阻抗导致外围电路内高频回路的Y电容实际效用下降。迫使部分正常工作时产生的高频噪声干扰流经模块电
图一为客户原始模块外围电路PCB布局图,输入输出端Y电容均通过细长的地线铜箔连接至红圈处接地螺孔位置,然后通过固定螺丝与散热器相连。
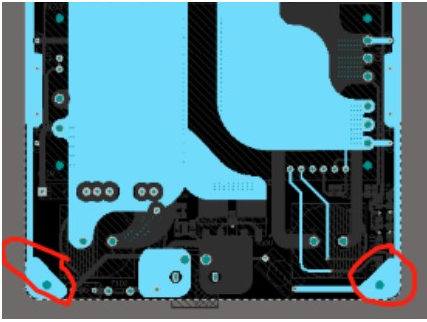
图一
图二为模块电源外围电路接地不良时,高频干扰噪声路径的简化模型
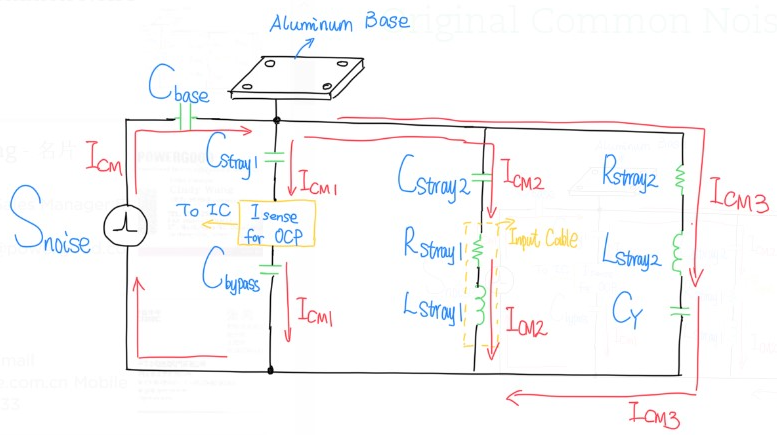
图二
Snoise为模块电源正常工作时,内部高速开关的功率元件等产生的共模噪声源。Cbase为模块内部功率元件与散热铝基板之间的耦合电容,正常工作时产生的高频噪声通过寄生电容Cbase注入到模块背面的散热铝基板。因为共模噪声本质上可等效为恒流源,所以注入到散热铝基板上的共模噪声总要寻找合适的路径返回其噪声源。当外围接地不佳时,将额外引入串联等效高频阻抗Rstray2和Lstray2,导致外加Y电容性能弱化。当PCB接地布局如图一中显示的细长型接地铜箔时,其可观的等效串联电感Lstray2在共模噪声有效频段内等效高频阻抗高达几十甚至上百欧姆。外围接地阻抗的增加迫使部分共模噪声通过其他耦合路径分流后返回其噪声源,同时也带来诸多期望之外的干扰问题。
外围电路接地不良时,部分共模噪声Icm1将通过铝基板与过流保护电路间耦合电容Cstray1注入。因为内部电流采样信号线路阻抗不平衡,所以部分注入的共模噪声将转化为差模噪声。模块电源内部精确电流采样信号容易被过量注入的高频噪声干扰,最终造成模块电源过流保护功能误动作,供电输出电压下降,导致电机输出扭矩不足。
因为被原始设计用于耦合高频噪声的外围Y电容接地不良,所以部分噪声Icm2通过铝基板与输入线缆间高频耦合后,从输入侧线缆返回其噪声源。过长的高频路径和扩大数百倍的高频环路面积大大增加了产品的EMI风险。
3. 解决对策:
如图三所示改善模块电源外围电路中所有接地部分布局,在模块电源固定螺丝孔位置就近布设接地铜箔。在模块电源的输入输出端与铝基板固定孔之间就近布置Y电容,确保接地铜箔尽量短且粗。
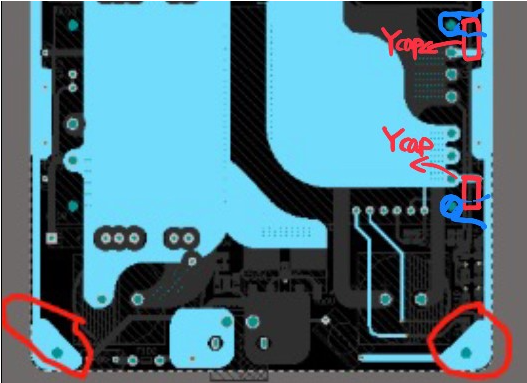
图三
图四为模块电源外围电路接地改善后的高频干扰噪声路径简化模型。降低外置Y电容回路的高频阻抗后,因为外置Y电容Cy>>Cstray1+Cstray2,所以绝大部分高频噪声将被外置Y电容有效旁路,从而保证模块电源内部信号电路的免受噪声干扰。
合理的外围电路布局和可靠接地处理同时也大大减少输入线缆上高频噪声,降低产品的系统EMI风险,确保产品的长期性能稳定。
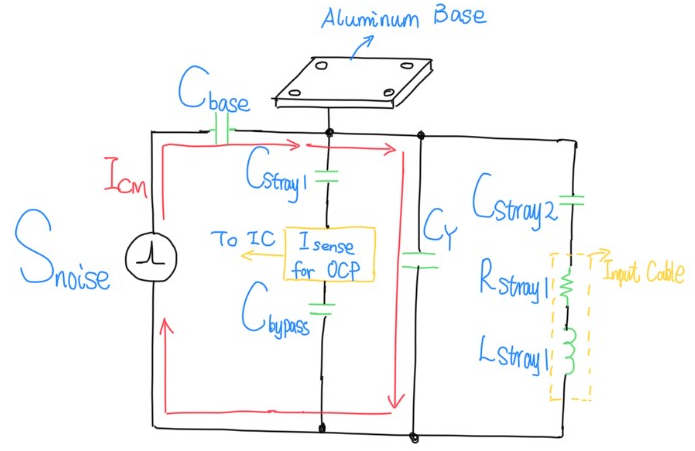
图四
4. 小结与思考:
如今更快节奏的社会发展速度和对产品独特竞争力的普遍要求对我们常规工作模式提出新的挑战。除了选择合理的模块电源产品,充分且高效的前期威廉希尔官方网站 沟通服务的重要性也上升到前所未有的高度。
审核编辑:郭婷
-
电源
+关注
关注
184文章
17711浏览量
250078 -
机器人
+关注
关注
211文章
28405浏览量
207014 -
emi
+关注
关注
53文章
3588浏览量
127645
发布评论请先 登录
相关推荐
IT7600用于水下机器人供电系统测试
水下机器人便携式遥控单元设计
【NanoPi NEO2试用申请】水下机器人探测项目
TDK-Lambda电源在系留无人机及水下机器人中的应用
如何设计水下机器人嵌入式控制系统?
【HarmonyOS HiSpark AI Camera】渔业卫士-基于图像识别的多自由度水下机器人
水下机器人制作需要实现哪些功能呢
水下机器人研发挑战海外市场
自由度下的水下机器人控制器抗干扰设计

基于PC104与C8051F120的水下机器人环境监测系统设计方案
一种水下机器人的水面平台控制系统设计
这些水下机器人你见过吗?一些水下机器人产品的介绍
新发明利用波浪能为水下机器人进行海底无线充电

水下机器人的设计与实现





 工商网监
工商网监
评论